Y(t)
реклама
")
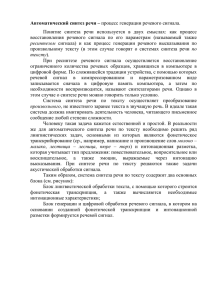
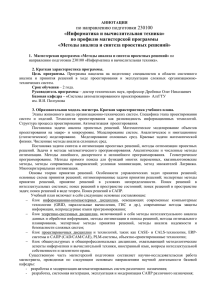
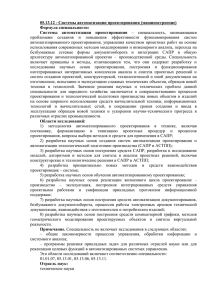
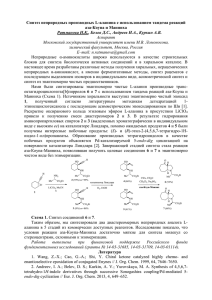
МЕТОДЫ И АЛГОРИТМЫ ПРОЕКТИРОВАНИЯ УСТРОЙСТВ СЛАБОТОЧНОЙ ЭЛЕКТРОНИКИ • Задача структурного синтеза в общем виде может быть решена путем полного перебора всех возможных вариантов с их сравнением для выбора наилучшего. • В практике САПР количество рассматриваемых структур ограничивается из-за чрезмерной трудоемкости, и задача решается обычно прямым методом синтеза, состоящим из трех этапов: • • формализации описания заданных характеристик устройства для получения описания схемных функций; • • выбора из библиотеки типовых структур или построение по полученному алгоритму функционирования исходной модели схемы, позволяющей реализовать требуемые функциональные преобразования; • • параметрической оптимизации варианта. • Для сокращения времени поиска необходимо осуществлять направленную селекцию, сужая область поиска определенным классом схем. • Процесс синтеза упрощается, если для построения схемных структур по заданной схемной функции определен тип элементов (функциональных преобразователей) с оптимальной степенью интеграции для использования в схеме. • На современном уровне развития САПР широкое применение находит вариант синтеза, основанный на объединении методов прямого синтеза и параметрической оптимизации - частичный структурный синтез, заключающийся в структурнопараметрической коррекции исходного схемного решения в соответствии с алгоритмом (рис. 4.1). Рис. 4.1. Блок-схема алгоритма частичного структурного синтеза • Для оптимизации структуры осуществляется целенаправленное изменение (включение или удаление) элементов, корректирующих звеньев или целых функциональных узлов в исходной схемной структуре с последующей параметрической оптимизацией, • что позволяет, с учетом имеющегося задела, опыта и интуиции разработчика, получать близкое к оптимальному решение задачи. • Для обеспечения этих возможностей в системе должен быть предусмотрен архив (база знаний), позволяющий использовать типовые функциональные решения. Степень автоматизации процесса может быть различна: • • разработчик указывает узлы коррекции, их приоритет и последовательность подключения различных корректирующих звеньев; • • разработчик указывает узлы коррекции и их приоритет, а выбор корректирующих звеньев и их подключение осуществляются программно. • • При этом разработка методов и алгоритмов формализации процесса определения возможных узлов коррекции и их приоритета в зависимости от их влияния на обрабатываемую функцию схемы, методов перебора варьируемых параметров, а также проблема формирования функции качества (критерия) приобретает важное значение. • Существуют задачи приближения к характеристике, заданной по точкам, задачи с изменяющимися условиями, задачи достижения экстремальных характеристик, когда экстремальное значение неизвестно. • В таких случаях программное обеспечение САПР должно включать модули обработки выходных характеристик и вычисления функции качества • Например, для минимизации монотонных переходных процессов можно использовать линейную интегральную оценку вида: Т • ,S Y (t )dt 0 0 • где Y(t) – переходная характеристика, Т – время переходного процесса. • Для оценки качества воспроизведения синусоидального сигнала используется интегральная оценка в виде коэффициента гармоник N K U *2 Г 2 U* U U1 • , где – относительное значение ν-й гармоники, • N – количество учитываемых гармоник. • Для оценки качества усилителя используется коэффициент усиления К0 по напряжению, току или мощности в пределах полосы пропускания, верхняя и нижняя граничные частоты которой задаются на уровне 0.7К0. Как правило, определяются наклон и линейность амплитудно-частотной характеристики в диапазоне частот. • При организации процесса синтеза целесообразно избегать излишне формального подхода, заменяя его на итеративный метод проб и ошибок. • При этом разработчик дает направление пробам, определяя цель, функцию качества, параметры поиска, ограничения. • Реализация такого подхода возможна при наличии в САПР мощных средств анализа, в первую очередь универсальных пакетов для моделирования электронных функциональных преобразователей и электронных систем различного назначения. ЭЛЕКТРОННЫЕ ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ – БАЗОВЫЕ ЭЛЕМЕНТЫ СХЕМ • • • • Все многообразие функциональных элементов можно свести к четырем основным (базовым) типам: генераторы сигналов, безынерционные элементы, инерционные линейные элементы, инерционные нелинейные элементы. Основной характеристикой элемента является его функция преобразования, связывающая его входной и выходной сигналы. • Генераторы сигналов разделяют на независимые и управляемые, формирующие ту или иную форму сигнала в зависимости от управляющего воздействия U. x(t ) xi (t ) при U. U i • • К управляемым генераторам относятся различные пороговые устройства, выходной сигнал которых зависит от превышения уровнем входного сигнала некоторого порогового значения. • Безынерционные линейные или нелинейные элементы – идеализированные реальные элементы с высоким быстродействием и точностью преобразования входного сигнала. • Функция пребразования такого элемента линейная или нелинейная функция вида y=f(x). • Важным частным случаем является безынерционный элемент с памятью, например триггер. Его функция преобразования зависит не только от x, но и от состояния элемента s: y=f(x,s) и связь между y и x устанавливается уравнениями алгебры логики или таблицами истинности. • Разнообразие типов безынерционных элементов определяет широту их применения. • По типу преобразования сигнала безынерционные электронные функциональные преобразователи можно классифицировать в соответствии с табл. 4.1. • Безынерционные линейные или нелинейные элементы, реализующие функциональное преобразование y = f(x), бывают статическими и динамическими. • Статические – преобразователи мгновенных значений (усилитель, сумматор, логарифмический усилитель, ограничитель), преобразующая характеристика которых это функция, ставящая в соответствие числу число. • Динамические – преобразователи параметров и формы полного сигнала заданного некоторым множеством значений. Динамическими они называются, потому что для определения Y в таких преобразователях (хотя они и относятся к безынерционным) требуется время для получения и обработки всего сигнала X. Например, в АЦП для определения Yi(t) на интервале квантования совершаются 3 операции: выборка и хранение аналогового сигнала, квантование его по уровню и кодирование в цифровой сигнал, т. е. для определения Yi(t) необходимо получить весь сигнал X(t) на некотором интервале t1 – t2 и проанализировать его. • Преобразующей характеристикой безынерционного элемента является оператор, если функции на входе ставится в соответствие функция на выходе или функционал, когда функции на входе ставится в соответствие число на выходе. • К этому типу элементов относятся импульсные, аналого-импульсные и импульсно-аналоговые элементы. • Функция преобразования таких элементов в программах проектирования и моделирования часто представляется в виде алгоритма. • Инерционные линейные элементы описываются интегродифференциальными уравнениями и во временной области характеризуются переходной характеристикой h(t), а в частотной области – комплексным коэффициентом передачи K(j). • В большинстве случаев инерционный нелинейный элемент можно описать системой дифференциальных уравнений вида • dyi (t ) dx (t ) gi ( y (t )) i f i ( x(t )) dt dt , i=1...n, • где x(t) и y(t) – входной и выходной сигналы элемента, n – порядок системы. • Методы моделирования и алгоритмы формирования моделей функциональных элементов электронных схем различны и, как показано в гл. 2, зависят от способа описания характеристик элементов и области – временной или частотной, – в которой выполняется моделирование. • Эти методы реализуются в специализированных и универсальных моделирующих программах. ПРОЦЕДУРЫ МИНИМИЗАЦИИ ПРИ ПРОЕКТИРОВАНИИ ФУНКЦИОНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ Начальное проектирование функциональных преобразователей проводится обычно в предположении, что цепь состоит из идеальных элементов. В реальной цепи отклик отличается от желаемого из-за потерь, неидеальности частотных характеристик, паразитных параметров элементов и т. п. Возникает необходимость проведения последовательности минимизаций этих отклонений с использованием следующих методов. • Многовариантный расчет (анализ) схем – многократное вычисление выходных параметров для заданных наборов (вариантов) внутренних параметров. • Многовариантный анализ используется как на начальных этапах проектирования, так и при отработке схемы и позволяет разработчику провести всестороннее изучение схемы, определить зависимость выходных параметров от внутренних параметров и их разброса в заданном диапазоне внешних воздействий. • Только при наличии такой информации разработчик может судить о возможности реализации схемы на данных элементах и о соответствии ее функционирования техническому заданию. • Алгоритм варьирования (определения наборов) внутренних параметров определяется в том числе с использованием метода планирования экспериментов. • Анализ чувствительности. • Под чувствительностью понимают реакцию схемы на малое изменение ее внутренних параметров X. • Количественная оценка изменения выходного параметра Y при заданном изменении параметра х называется коэффициентом чувствительности. • Анализ чувствительности необходим при определении требований к точности параметров элементов схемы при их выборе, а также при проектировании схем, работающих в сложных условиях эксплуатации, когда элементы схемы подвержены ускоренному старению и температурным изменениям. • . • Наиболее простым и распространенным методом расчета чувствительности является метод приращений, основанный на численном дифференцировании. • Коэффициент чувствительности j-го выходного параметра к изменению i-го внутреннего параметра определяется по формуле y j y j x1, x2 ,...xi xi ..., xn y j x1, x2 ,...xi ..., xn xi xi • Алгоритм расчета включает в себя следующие этапы. • Расчет выходных параметров в номинальном режиме, т.е. вычисление вектора Y(x1, x2,...,xn). • Выполнение n вариантов расчета, в каждом из которых дается отклонение от номинального значения только одному из xi. • При этом каждый раз получается вектор выходных параметров Y(x1,x2,...,xi+xi,...,xn), каждая j-я компонента которого определяет коэффициент чувствительности j-го выходного параметра к изменению i - го внутреннего параметра. • Всего требуется (n+1) вариантов расчета схемы, где n – число внутренних параметров, по которым исследуется чувствительность • Метод расчета на наихудший случай. • Цель расчета на наихудший случай состоит в определении вектора выходных параметров Yнс, компоненты которого являются наихудшими среди всех возможных. • Получаемые с помощью этого метода оценки рассеяния значений выходных параметров сильно завышены, так как получаются без оценки плотности их распределения. • Метод применяется, если известны предельно возможные отклонения xi внутренних параметров от своих номинальных значений. • Данный метод удобен тем, что для его применения не требуется знания законов распределения внутренних параметров Х и числовых характеристик этих законов. • Выходной параметр yj достигает верхней границы своего диапазона рассеяния, когда все внутренние параметры xi принимают самые неблагоприятные значения. • Алгоритм расчета строится исходя из предположения, что знаки коэффициентов чувствительности, определяющие направление влияния данного внутреннего параметра на выходной параметр, остаются неизменными. • Проводится анализ чувствительности, в результате которого определяются знаки коэффициентов чувствительности sign (yj / xi) для всех выходных параметров. • Внутренним параметрам присваиваются самые неблагоприятные значения: • xiнс = xiном – (sign (yj / xi)) xi для условия работоспособности yj > yjдоп, • xiнс = xiном + (sign (yj / xi)) xi для условия работоспособности yj < yjдоп, • С принятыми параметрами выполняется анализ схемы, т.е. расчет выходного параметра yj для наихудшего случая. • Вероятность сочетания параметров элементов схемы, близких к самым неблагоприятным, мала. Поэтому более реальную картину дают методы статистических испытаний. • Статистический анализ. Целью статистического анализа является определение процента выхода годных схем, соответствующих техническому заданию при данном конкретном разбросе параметров Х. • Статистический анализ схемы сводится к расчету вероятности Р(Х) того, что вектор внутренних параметров Х, определяющий состояние схемы находится в области работоспособности. • Исходной информацией для статистического анализа являются характеристики законов распределения внутренних параметров Х, а результатом расчета характеристики законов распределения выходных параметров Y. • Анализ проводится методом статистических испытаний (метод Монте-Карло). Алгоритм статистического анализа методом Монте-Карло представлен на рис. 4.2. • Здесь N – запланированное число статистических расчетов, k – номер текущего испытания. • Сущность метода в многократном повторении расчета (анализа) схемы, при варьировании параметров Х по заданному случайному закону. Случайное значение каждого параметра рассчитывается по формуле x xном (1 , ) • • где – центрированная случайная величина, принимающая значения на отрезке (–1, +1), – относительный разброс параметра x. Рис. 4.2. Структурная схема алгоритма статистического анализа Моделирование входных параметров по случайному закону Анализ схемы Обработка результатов очередного испытания Да kN Нет Вывод результатов • Каждый расчет эквивалентен одному испытанию реальной схемы. • Если из общего числа N назначенных испытаний результаты М испытаний удовлетворяют требованиям ТЗ, то отношение М/N характеризует искомую вероятность Р(Х) получения годных схем. • По результатам статистического анализа можно оценить числовые значения характеристик распределения выходных параметров – математическое ожидание: N M j y jk / N k 1 • j-го выходного параметра • и среднеквадратическое отклонение • • • j D y jk M j / N 1 k 1 , N где D – дисперсия. 2 • Преимущество метода заключается в возможности с его помощью проектировать (зная статистические сведения о параметрах) сложные интегральные схемы с большим числом корреляционных связей между параметрами. Практически для расчета с ошибкой 5–10% необходимо 500–1000 испытаний, что вполне приемлемо при использовании современных компьютеров. СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ В МИКРОЭЛЕКТРОНИКЕ • В настоящее время, на фоне опережающего развития субмикронной полупроводниковой технологии, в мировой микроэлектронике наблюдается стремительное развитие наиболее перспективного направления разработки принципиально новых методологий и средств автоматизированного проектирования сверхсложных интегральных «систем в кристалле» (system on chip» – SOC) как технологии реализации узлов электронной аппаратуры. • Ведущие электронные фирмы, наряду с разработкой и массовым производством микросхем высокоинтегрированных процессоров высокой производительности, памяти сверхбольшой ёмкости, начали использовать принципиально новый подход к реализации специализированных сверхсложных интегральных схем на основе методологии SOC. • «Система в кристалле» объединяет на одном кристалле так называемые «виртуальные компоненты» (VC) в виде блоков «интеллектуальной собственности» («Intelectual property» или IP-блоки). • К данным IP-блокам относятся IP-блоки процессоров различного вида, IP-блоки аналоговых узлов, памяти, интерфейсов, «жесткой» логики, а в будущем могут также относиться, например, оптико-микроэлектронные механические системные компоненты. • Повторное использование широкой номенклатуры IPблоков существенно сокращает сроки разработки SOC. • При этом на системном и функциональном уровне происходит объединение средств САПР электронных схем и систем SOC и могут быть реализованы несколько траекторий проектирования: • • на основе электрической схемы, выполненной в любой библиотеке элементов фирма – изготовитель производит автоматизированный перевод проектов в базис библиотек IP-блоков; • • фирма – изготовитель производит автоматизированное проектирование электронного устройства в базисе библиотек IP-блоков на основе технического задания заказчика. • В целях наиболее эффективного использования современных средств САПР аппаратуры и элементной базы при разработке перспективной РЭА формируется распределенная структура базовых центров САПР (Дизайн-центры). • Базовые центры САПР призваны обеспечить ускоренное освоение, эффективное использование современных методов и средств САПР по своим направлениям техники, с распространением своего опыта на другие предприятия. • Развитие работ по САПР и IP-блокам создает реальную основу проектирования «систем в кристалле» сложностью, оцениваемой в миллионы логических элементов. АВТОМАТИЗИРОВАННЫЙ СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ • В системах с ЭУ используют все основные принципы, разработанные в теории автоматического управления: • • жесткое программное управление, когда формирование управляющих воздействий производится по заданному закону, не зависящему от действующих возмущений и фактического значения выходных координат ЭУ; • • управление, основанное на информации о фактическом значении выходной координаты y(t), получаемой по каналу отрицательной обратной связи, в качестве которой используют значение отклонения координаты у(t) (или ее среднего или действующего значения) от заданного значения . Этот вид управления называют управлением по отклонению. Задачей управления является минимизация отклонения y(t) от заданного значения; • • управление, основанное на использовании информации о действующих возмущениях, основное достоинство которого высокое быстродействие. • Применяют также комбинированное управление, сочетающее в себе программное управление, управление по отклонению и по возмущению. • Можно выделить три подхода к решению задач проектирования и синтеза систем управления. • Первый подход базируется на операторных методах, имеющих дело с преобразованиями в плоскости комплексной переменной s или z, а также на методе корневого годографа. • При использовании этого подхода проектирование системы осуществляется последовательными приближениями и поэтому его называют также методом проб и ошибок. • При проектировании системы требуется удовлетворять ряду требований, предъявляемых к частотным или временным характеристикам системы. • Этими характеристиками являются запас по усилению, запас по фазе, показатель колебательности, выходной импеданс, время нарастания и время установления процессов, максимальное перерегулирование. • Для удовлетворения заданных требований обычно производится регулировка усиления и коррекция частотных и временных характеристик системы. • Второй подход, часто называемый аналитическим, основан на использовании для оценки качества системы интегральной квадратичной и среднеквадратичной ошибки • . 2 J 0 yпер (t )dt 0 • Эти критерии качества были впервые предложены Винером и Холлом. • Проектирование сводится к расчету компенсирующего фильтра при использовании классических вариационных методов для минимизации ошибок. • Этот подход может быть применен к линейным системам, а также и к линейным дискретным системам. • Третий подход к проектированию систем управления, являющийся обобщением второго, включает следующие этапы: • Вначале задается или составляется, например, на основе второго метода Ляпунова, функционал от переменных управления и состояния процесса. • Затем определяется закон управления или управляющая последовательность, доставляющая функционалу максимум или минимум. • Закон управления выражает управляющее воздействие в виде функции координат состояния объекта, что в результате приводит к системе с обратной связью. • В относительно простых системах оптимальный закон управления можно реализовать с помощью корректирующего устройства или активного фильтра. • С точки зрения инженерной практики, в решении задачи синтеза системы управления методически можно выделить 2 этапа. • На первом этапе конструируется объект регулирования и «ядро» регулятора с такими статическими характеристиками, при которых обеспечивается существование множества статических равновесных состояний в заданной области. • Эта задача решается чисто инженерными средствами – расчетом схемы и регулировочной характеристики. • На втором этапе обеспечивается физическая реализуемость этих состояний, т.е. их устойчивость путем подбора параметров регулятора с добавлением при необходимости корректирующих устройств. • В настоящее время в технике преимущественное распространение получил метод последовательной коррекции с использованием звеньев, формируемых из операционных усилителей, охваченных цепями отрицательной обратной связи. • Такое активное корректирующее устройство, называемое регулятором, совмещает функции управляющего и корректирующего звеньев и позволяет создавать астатические или близкие к ним системы. • Для того, чтобы добиться желаемого качества процесса управления или регулирования, т.е. требуемой точности системы и качества переходного процесса, есть два способа. • Первый состоит в изменении параметров данной системы, так как с изменением параметров изменяются коэффициенты передачи, частотные характеристики, а значит, и качество процесса. • Если же изменением параметров не удается получить необходимый результат или если такое изменение существенно ухудшает, например энергетические показатели ИП, то применяют второй способ - изменение структуры системы введением дополнительных звеньев - корректирующих устройства (КУ). • Основная задача корректирующих устройств состоит в улучшении точности системы и качества переходных процессов. Рис. 4.3. Методы коррекции систем с обратной связью: Wис исходная система, Wич - ее изменяемая часть; Wку последовательное корректирующее устройство; Wос - звено обратной связи. • Корректирующие устройства могут быть последовательными с введением дифференцирующих, интегрирующих и упреждающих звеньев (рис. 4.3, б) и параллельными в виде местных обратных связей различного типа (рис.4.3, в). Рис. 4.4. Структурные схемы типовых регуляторов. R2 C R1 R а) пропорциональный регулятор C б) интегральный регулятор R2 C1 C2 R2 R1 в) пропорциональноинтегральный регулятор R1 г) пропорциональнодифференциальный регулятор • - П – пропорциональный (рис. 4.4, а), с передаточной функцией ; W p R2 R1 • - И – интегральный (рис. 4.4,б), с передаточной функцией ; W p 1 pRC 1 pT • - ПИ – пропорционально-интегральный (рис. 4.4, в), с передаточной функцией ; W p R2 R1 1 pR1C k 1 pT • - ПИД - пропорционально-интегрально-дифференциальный, (рис. 4.4, г) с передаточной функцией , W p k pTд 1 pTи где k T1 T2 TT , Tд 1 2 , Tи T3 R1C2. T3 T3 • Системы регулирования представляют собой сложные нелинейные, нестационарные системы. Общего метода синтеза таких систем не существует, поэтому в практике проектирования систем автоматического управления (САУ) широко применяется линейная теория, что объясняется рядом причин: • • методы решения нелинейных задач требуют сложных алгоритмов, а класс систем, для которых применимы эти алгоритмы либо узок, либо не поддается точному определению; • • многие процессы и объекты достаточно хорошо описываются линейными моделями, или при малых отклонениях относительно опорного режима возможна линеаризация; • • линейное управление достаточно просто реализуется и часто дает требуемые результаты – системе можно придать достаточные запасы устойчивости и в известной мере обеспечить ее «грубость» по отношению к нелинейностям; • • для решения типовых задач управления можно применять единообразный математический аппарат. • Кроме того, линейные методы можно рассматривать как предварительный шаг в итерационном процессе проектирования, когда на следующем шаге система исследуется уже с учетом нелинейностей. • Процесс автоматизированного синтеза САУ при использовании линейной теории заключается в следующем: • • составляется линеаризованная модель системы; • • осуществляется синтез структуры САУ и законов управления; • • проводится параметрический синтез системы одним из линейных методов теории автоматического управления; • • проводится анализ и уточнение результатов исследованием системы с учетом нелинейностей. • При проектировании САУ к ним предъявляют следующие требования: • • устойчивости, заключающееся в том, чтобы для вектора выхода y(t) выполнялось условие lim y(t ) yоп 0 при t • • управляемости, заключающееся в том, что должен существовать входной вектор u(t), позволяющий перевести вектор выхода из начального состояния y(t0) в конечное y(t1) за заданное время (t1–t0); • • наблюдаемости, означающее возможность по наблюдению вектора выхода в течении интервала (t1–t0) найти начальное состояние x(t0); • • качества регулирования, согласно которому в переходном процессе должно выполняться условие ymax –y(t1) < y(t1), где – допустимая относительная динамическая ошибка (перерегулирование); • • помехоустойчивости, заключающееся в том, чтобы ошибка воспроизведения заданного входного воздействия при наличии помех не превышала заданной величины; • • "грубости", заключающееся в обеспечении работоспособности в условиях ограниченной неопределенности в задании параметров. • В этих условиях к схеме управления предъявляются следующие функциональные требования: – Заданная крутизна (коэффициент усиления) и линейность модуляционной характеристики. – Максимальный диапазон регулирования длительности импульса (0 1). – Предельная рабочая частота. – Возможность внешней синхронизации. – Помехозащищённость. – Гальваническая развязка входа от выхода. – "Мягкий" запуск. – Многоконтурное управление: • • параллельная работа модулей – (токораспределение); • • ограничение тока нагрузки – (токостабилизация); • • стабилизация напряжения. – Дистанционное управление. – Симметрирование импульсов при двухтактном выходе. – Наличие защит (тепловых, по напряжению, току и т.д.). • Автоматизированный синтез САУ проводится: • По частотной характеристике разомкнутой системы с обеспечением заданного расположения полюсов ее передаточной функции. • По переходной характеристике замкнутой системы с обеспечением заданного качества переходного процесса, учитывая, что для систем с одной нелинейностью, обладающих свойством фильтра, можно определять устойчивость как свойство затухания переходных процессов. • При этом граница устойчивости может быть определена как граница области существования периодических колебаний в системе. • Считается, что запас по фазе больше 30 град., если перерегулирование в затухающем переходном процессе h < 30%. • Нелинейная система с одной нелинейностью обладает свойством фильтра, если величина амплитудной характеристики линейной части на частотах высших гармоник значительно меньше, чем для первой (очевидно, что сглаживающий фильтр обладает этим свойством). Порядок синтеза по частотной характеристике • Подход основан на приведении дискретной (импульсной) системы к непрерывной и ее линеаризации. Для решения задачи используются известные из теории непрерывных линейных систем критерии. • Критерий Найквиста. Для устойчивости замкнутой САУ, устойчивой в разомкнутом состоянии, т.е. имеющей только отрицательные вещественные части корней характеристического уравнения, необходимо и достаточно, чтобы частотный годограф комплексного коэффициента передачи разомкнутой системы при изменении ω от 0 до ∞ не охватывал точку (–1; 0). • Критерий Боде. Система, обладающая положительным запасом по фазе в точке пересечения АФЧХ и окружности единичного радиуса устойчива, а обладающая отрицательным запасом – неустойчива. • Или скорость изменения коэффициента усиления разомкнутой системы по частоте должна быть равна 20 Дб/дек в достаточно широком диапазоне частот (н, в) в окрестностях частоты с, при которой комплексный коэффициент усиления равен единице (н/с<0/5, в /с >4). Рис. 4.3. Частотный годограф комплексного коэффициента передачи IM -1,0 RE Рис. 4.4. ЛАЧХ разомкнутого контура • Синтез управления импульсного стабилизатора напряжения (ИСН). Схема управления ИСН включает: задающий генератор синхроимпульсов (Uсинх), генератор пилообразного напряжения (Г), источник опорного сигнала (Uоп), усилитель сигнала ошибки (У), компаратор (К), формирователь импульсов управления силовым транзистором (рис. 4.5). • В системе регулирования при изменении сигнала ошибки меняется выходное напряжение усилителя сигнала ошибки, коэффициент заполнения управляющих импульсов и среднее значение напряжения импульсов на выходе силового транзистора, за счет чего и осуществляется широтноимпульсное регулирование выходного напряжения. Е VT1 Rб Lф VD Rн Сф VT2 С1 К ГПН Uсинх R1 С2 R2 У R3 Uоп • Рис. 4.5. Схема импульсного стабилизатора напряжения • Линеаризуя систему, импульсный стабилизатор напряжения с силовым каскадом, состоящим из транзисторных ключей, трансформатора и выпрямителя (в схеме на рис. 4.5 отсутствуют), можно заменить непрерывным «трансформатором постоянного тока», выходное напряжение которого определяется напряжением источника питания Е, коэффициентом трансформации трансформатора и относительной длительностью импульса, подаваемого на управляющий вход силового каскада с выхода ШИМмодулятора: • U н Kт р Е . • Текущее («непрерывное») значение равно отношению выходного напряжения усилителя сигнала ошибки к амплитуде «пилы» АР: • γ=UУ /АР, где 0 ≤ γ ≤ 1. • Такой подход возможен, если частота работы импульсного элемента много больше собственной частоты непрерывной части – фильтра, что всегда выполняется. • Для синтеза управления в режиме частотного анализа размыкается цепь обратной связи и на её вход подаётся единичный сигнал, изменяющийся в широком диапазоне частот. • Изменяя структуру и параметры корректирующих устройств, добиваются ЛАЧХ или АЧХ, соответствующих приведенным выше критериям Найквиста, Боде. • Такой подход гарантирует для рассматриваемого класса систем устойчивость в малом и требует дополнительных испытаний на реальной модели системы. • Порядок синтеза по переходной характеристике • При синтезе по переходной характеристике структура и параметры корректирующих устройств меняются, пока не будет обеспечено требуемое качество переходного процесса. • При таком подходе можно использовать линеаризованную модель или нелинейную, без упрощений, модель замкнутой системы. • По характеру переходного процесса судят о запасах устойчивости системы (типовыми являются требования – перерегулирование не более 10%, степень затухания A ln 1 A2 0,4 где A1 , A2 - два соседних максимума). • Так как импульсные системы являются нелинейными системами, должна гарантироваться устойчивость при наихудшем сочетании нагрузки и питания. • Однозначных алгоритмов поиска такого сочетания нет, поэтому надо проверять систему во всех возможных динамических режимах. • Алгоритм динамического синтеза ИСН. Для улучшения устойчивости и динамических характеристик – уменьшения динамической ошибки и времени переходного процесса, в схему управления включаются корректирующие звенья, при этом удается не изменять параметров силовых элементов ИСН, рассчитываемых по критериям оптимальности силовой части. • Одним из эффективных и часто применяемых средств коррекции является введение производных в закон регулирования. • Введение производной в закон регулирования чаще всего реализуется последовательным включением инерционнофорсирующего звена. • Передаточная функция регулятора при этом имеет вид W p K ос • 1 pT2 , 1 pT1 а динамический синтез ИСН заключается в правильном выборе коэффициентов K ос R1 R2 (статический коэффициент усиления), T2 и Т1 (постоянные времени форсирующего и инерционного звеньев). • • • • • • • Статический коэффициент передачи регулятора в схеме ИСН понижающего типа связан с общим коэффициентом усиления разомкнутой системы соотношением K р K ос E AP , где AP – амплитуда пилообразного напряжения. Требуемое значение Кр вычисляется по заданной статической точности ИСН Kр>((Emax-Emin)/Emin)/((Uн.max-Uн.min)/Uн.ном.), где Uн – выходное напряжение ИСН, и не должно превышать предельного значения, которое определяется по условию устойчивости стационарного режима (недопустимости возникновения автоколебаний): Tф2 Kр 4 2 . T • Постоянная времени инерционного звена T1 принимается минимальной и выбирается по условию обеспечения помехозащищенности. • Наименьшее значение Т1 при отсутствии других ограничений определяется максимальной полосой пропускания замкнутого контура или частотой среза разомкнутого контура, которую можно принять равной собственной частоте фильтра. • Тогда T < T1 < Tф / 2, • где Т – период ШИМ, Tф LфСф – постоянная времени непрерывной части (фильтра). • При увеличении Т1 в системе регулирования могут возникнуть низкочастотные колебания. • При заданном значении Kос постоянная времени форсирующего звена выбирается по условию обеспечения апериодического характера переходного процесса при включении и не должна превышать предельного значения, определяемого по условию недопустимости возникновения • автоколебаний на частоте отличной от частоты ШИМ • где U н.ном Еmin 2Tф2 T2 K ос , TK р – коэффициент заполнения импульса при Emin. • Уточнение параметров Т1 и Т2 при заданном значении коэффициента усиления осуществляется методом многовариантного анализа с направленным перебором их значений в определенных диапазонах. Схемотехническая модель ИСН