КОМПЛЕКСНАЯ МОДЕРНИЗАЦИЯ СИСТЕМ ТЕЛЕСКОПА ЦЕЙСС-1000 С ВОЗМОЖНОСТЬЮ УДАЛЕННЫХ НАБЛЮДЕНИЙ
реклама

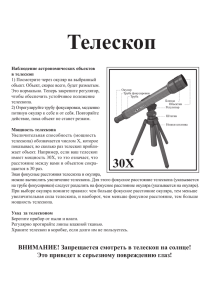
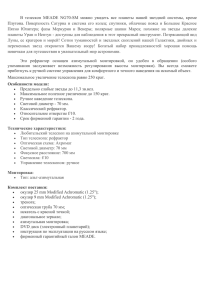
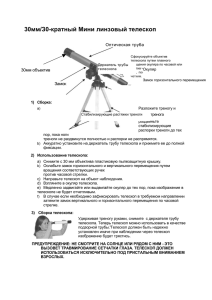
КОМПЛЕКСНАЯ МОДЕРНИЗАЦИЯ СИСТЕМ ТЕЛЕСКОПА ЦЕЙСС-1000 С ВОЗМОЖНОСТЬЮ УДАЛЕННЫХ НАБЛЮДЕНИЙ С.В.Драбек, В.С.Шергин, В.В.Власюк, В.В.Комаров (САО РАН) Характеристики телескопа • • • • • • • Диаметр главного зеркала 1016 мм Фокус Кассегрена: Эквивалентное фокусное расстояние Диаметр невиньетированного поля Фокус куде: Эквивалентное фокусное расстояние Диаметр невиньетированного поля • • • • • Спектральный диапазон 0.3 - 10 mkm Угловое разрешение 0.8 arcsec Масса трубы 4.8 т Масса монтировки 12 т Предельная звездная величина, полученная в фотометрическую ночь с изображениями 1.5",в фильтре V, за экспозицию 30 мин.- 23.5 13.3 м 170 мм = 45 arcmin 36.5 м 76 мм = 8 arcmin Инструменты телескопа Цейсс-1000 • ПЗС-фотометр на базе камеры 2048x2048 эл. c набором широкополосных фильтров U,B,V,R,I Поле зрения – 7’ Проницающая сила – до 23.5 зв.вел. Инструменты телескопа Цейсс-1000 Спектрограф с длинной щелью UAGS + ПЗС 2048x2048 эл. Спектральный диапазон от 350 до 900 нм. Разрешение – от 0.1 до 1 нм. Проницающая сила – Около 15 зв.вел. Инструменты телескопа Цейсс-1000 Эшелле-спектрограф в фокусе кудэ Оснащен ПЗС-камерой с 2048x2048 эл. Спектральное разрешение – 40000 (есть возможность более высокого). Проницающая сила – около 7 зв.вел. Основные инструментальные требования к проекту: • замена релейного управления электрическими приводами на инверторное с использованием частотных преобразователей SEW Eurodrive, управляемых по последовательной шине CAN bus, хорошо зарекомендовавших себя в работе на БТА • замена преобразователей «угол-код» на осях телескопа с последующей реализацией режима сопровождения объектов в широком диапазоне скоростей по модели с обратной связью • замена электрического привода купола и установка преобразователя «угол-код» на купол башни для компьютерного управления позиционированием • реконструкция электропривода и механизма фокусировки телескопа с заменой асинхронных электродвигателей на сервисный привод, с обратной связью по положению и функцией компьютерного управления • реконструкция цепей электропитания и заземления на телескопе и создание системы резервированного электроснабжения на основе системы бесперебойного электропитания типа SmartUPS Основные инструментальные требования к проекту Программный комплекс - двухуровневая АСУ, имеющая в составе: • • • программные и сетевые интерфейсы для взаимодействия c оборудованием телескопа, программами и аппаратурой пользователей; поддержку удаленного доступа и возможность создания на ее базе полностью автоматизированных программ наблюдений; комплекс решений и средств для защиты персонала и оборудования от возникновения аварийных ситуаций. Для внедряемых на телескопе новых астрономических методов предусматриваются следующие возможности: • • • • • • встроенные функции управления эшелле-спектрографом в фокусе кудэ; резервные цифровые и аналоговые интерфейсы; автоматизация ряда общих функций управления телескопом (гидирование, фокусировка, контроль системы блокировок); сетевой обмен информацией и командами управления между АСУ и внешними программами пользователей; установка дополнительных резервных источников энергоснабжения; возможность интеграции дополнительных источников видеоинформации. Кинематическая схема оси прямого восхождения телескопа Структурная схема новой АСУ телескопа Цейсс-1000 Датчики положения, частотные преобразователи, привод купола Общий вид интерфейса пользователя Точностные характеристики комплекса и их учет АСУ телескопа Точность наведения по склонению Точность наведения по часовому углу Результат аппроксимации ошибок наведения телескопа классической моделью из 8 параметров. Остаточные невязки – около 3” по часовому углу и 7” по склонению. Исследование ошибок механики телескопа Гармоники: 5400" — оборот главного червяка, возможно переменное сопротивление движению. 300" — основной вал редуктора двигателей, к нему подключен редуктор датчика. 1800" — промежуточный вал редуктора датчика (передаточное число 6). 1296" — ось самого датчика. 900" и 648" — вторые гармоники (эллиптичность колес). Вывод: редуктор датчика разработан под датчик с дискретом 1.296", на новом датчике с дискретом 0.158" он ухудшает точность почти в 4 раза. Пример записи положения реальной звезды на телеподсмотре Поведение по осям часового угла и склонения Результаты спектрального анализа поведения звезды по часовому углу. Примеры записей ИСЗ с камеры телеподсмотра телескопа-гида и штатного ПЗС-фотометра в кассегреновскоми фокусе. Пример работы по комете P154/Brewington Снимок кометы P154/Brewington в режиме программного слежения. Накопление со штатным ПЗС-фотометром – 5 мин. Пример длительного накопления – поле радиоисточника 3C111 – за 20 мин в полосе R. Реализация режима удаленных наблюдений Вид рабочего места наблюдателя в лабкорпусе Конфигурация : 1 ПК под Windows 7 c двумя мониторами – для управления сбором данных и для управления системами телескопа. Режим внедрен для методов ПЗС-фотометрия, спектроскопия с длинной щелью и в фокусе кудэ, идет обучение наблюдателей. ЗАКЛЮЧЕНИЕ В 2013 году авторами создана уникальная система управления многозадачного 1-м телескопа Цейсс-1000, предполагающая использование различных наблюдательных комплексов. Данная система в перспективе обеспечит возможность использования всех ее возможностей в вариантах местного или удаленного управления. Замена систем управления приводами осей телескопа, датчиков главных осей, реализация алгоритмов расчетов и сопровождения с обратной связью по датчикам позволили повысить точность наведения телескопа до 3” по прямому восхождению и 7” по склонению, значительно улучшить качество сопровождения, в том числе с возможностью программного слежения для объектов с собственным движением. Эти возможности продемонстрированы на примерах исследования ИСЗ и комет, а улучшенные характеристики слежения сделали возможным получение экспозиций с ПЗС-фотометром длительностью в 20-30 минут без потери углового разрешения. Итогом работы к настоящему времени можно считать реализацию метода дистанционных наблюдений с штатным ПЗС-фотометром телескопа через сеть ИНТЕРНЕТ. В отличие от значительного числа существующих проектов автоматизации и роботизации астрономических телескопов предложенная система предназначается для интеграции всех наблюдательных инструментов 1-м телескопа с его управляющей системой, в том числе и с возможностью проведения удаленных наблюдений. ЗАДАЧИ НА БУДУЩЕЕ Задачами ближайшего будущего будут: реализация проектного варианта управления фокусировкой телескопа, интегрирование систем управления сбора данных ПЗС-систем и АСУ телескопа, включение системы управления новых спектральных средств в единую информационную среду, также обеспечивающее «безлюдный» режим наблюдений. Развитие методов стратегии проведения наблюдений, создание надежных систем контроля метеопараметров и состояния облачности станут дальнейшими шагами к полной роботизации процесса астрофизических исследований в САО на телескопах метрового класса. Подходы к решению задачи полностью автоматизированных и роботизированных наблюдений на телескопах метрового класса, развиваемые авторами, имеют практическое значение в плоскости предполагаемого создания в стране новых инструментов этого класса, ориентированных на широкий спектр астрофизических и прикладных задач.