Глава III. Аналитическая геометрия
advertisement

Дисциплина ЛААГ
(линейная алгебра
и аналитическая геометрия)
Кафедра высшей
математики
ТПУ
Лектор:
доцент
Тарбокова
Татьяна
Васильевна
1
Тема 4. Аналитическая
геометрия в пространстве
• Разделы
• 1. Плоскость
• 2. Прямая в пространстве
• 3. Поверхности второго
порядка
2
Плоскость и прямая в пространстве
Уравнение плоскости, проходящей
M0(x0;y0;z0) перпендикулярно вектору
через точку
N { A, B ,C }.
Вектор, перпендикулярный плоскости, называют нормальным
вектором этой плоскости.
N
M0
r0
O
M
r
3
r r0 , N 0
Уравнения
(1*)
A( x x 0 ) B ( y y0 ) C ( z z0 ) 0
и
(1)
называют уравнением плоскости, проходящей через точку
M 0 ( x 0 , y 0 , z 0 ) перпендикулярно вектору N { A, B ,C } (в
векторной и координатной форме соответственно).
r , N D 0
Уравнения
(2*)
Ax By Cz D 0
и
(2)
называют общим уравнением плоскости (в векторной и
координатной форме соответственно).
ВЫВОДЫ:
1) Плоскость является поверхностью первого порядка. Она
может быть задана общим уравнением Ax+By+Cz+D=0, где
A,B,C,D – числа.
2) Коэффициенты A, B, C не обращаются в ноль одновременно,
так как с геометрической точки зрения это координаты
вектора, перпендикулярного плоскости.
4
Если в уравнении Ax+By+Cz+D = 0 все коэффициенты A,B,C
и D отличны от нуля, то уравнение называют полным; если
хотя бы один из коэффициентов равен нулю – неполным.
1) Пусть общее уравнение плоскости – полное. Тогда его можно
записать в виде
x y z
1
a b c
(3)
С геометрической точки зрения a,b и c – отрезки, отсекаемые
плоскостью на координатных осях
Ox, Oy
и
Oz
соответственно. Уравнение
(3)
называют уравнением
плоскости в отрезках. z
C ( 0,0, c )
B ( 0, b,0 )
y
x
A (a,0,0 )
5
Алгоритм решения задачи 1
а) Требуется записать уравнение плоскости,
проходящей через точку M0(x0;y0;z0), параллельно
двум неколлинеарным векторам
1 {m1; n1; p1} и 2 {m 2 ; n2 ; p2 }
6
1
2
M
M0
r
r0
O
Уравнения
r r0 , 1, 2 0
(4*)
x x 0 y y0 z z0
m1
n1
p1 0
и
(4)
m2
n2
p2
называют уравнениями плоскости, проходящей через
точку параллельно двум неколлинеарным векторам
(в векторной и координатной форме соответственно). 7
б) Уравнение плоскости, проходящей через три точки, не
лежащие на одной прямой
Пусть плоскость проходит через три точки M1(x1;y1;z1),
M2(x2;y2;z2) и M3(x3;y3;z3), не лежащие на одной прямой.
M2
M
M3
M1
Уравнения
r r1 , r2 r1 , r3 r1 0
(5*)
x x 1 y y1 z z1
x 2 x 1 y 2 y1 z2 z1 0
и
(5)
x 3 x 1 y 3 y1 z3 z1
называют уравнениями плоскости, проходящей через
три точки M 1 ( x 1, y1, z1 ) , M 2 ( x 2 , y 2 , z 2 ) и M 3 ( x 3 , y 3 , z 3 )
(в векторной и координатной форме соответственно). 8
9
10
Алгоритм решения задачи 1
• в) Направляющий вектор l (m, n, p)
• прямой x x1 y y1 z z1
m
n
p
• можно взять в качестве нормального к
плоскости и получить искомое уравнение
плоскости:
m( x x A ) n( y y A ) p( z z A ) 0.
11
Алгоритм решения задачи 1
• г) Подставив в уравнение плоскости в
отрезках x y z
1
a b c
• вместо х, у, z координаты данной точки,
заменим знаменатели в уравнении одним
числом d и найдём его из полученного
уравнения.
• Искомое уравнение будет иметь вид:
x yz d
12
Алгоритм решения задачи 2
а) составить уравнение прямой в пространстве, проходящей
через точку M0(x0;y0;z0) , параллельно вектору
{m; n; p}
Вектор, параллельный прямой в пространстве, называют
направляющим вектором этой прямой.
z
M0
r0
O
x
r
M
y
13
Уравнение
и систему уравнений
r r0 t ,
x x 0 t m ,
y y0 t n ,
z z 0 t p.
(2*)
(2)
называют параметрическими уравнениями прямой
в
пространстве
(в векторной и координатной форме
соответственно).
Пусть вектор не параллелен ни одной из координатных
осей (т.е. m 0 , n 0 и p 0 ).
x x 0 y y0 z z0
Уравнения
(3)
m
n
p
называют
каноническими
уравнениями
прямой
в
пространстве.
14
Алгоритм решения задачи 2
б) Частным случаем канонических уравнений являются
УРАВНЕНИЯ ПРЯМОЙ, ПРОХОДЯЩЕЙ ЧЕРЕЗ ДВЕ
ЗАДАННЫЕ ТОЧКИ.
Пусть прямая проходит через точки M1(x1,y1,z1) и M2(x2,y2 ,z2) .
M1
M2
x x1
y y1
z z1
Уравнения
(4)
x 2 x1 y2 y1 z2 z1
называют уравнениями прямой, проходящей через две
точки M 1 ( x 1, y1, z1 ) и M 2 ( x 2 , y 2 , z2 ) .
15
Алгоритм решения задачи 2
• в) Направляющим вектором искомой
прямой можно взять единичный вектор,
координатами которого являются
направляющие косинусы,
удовлетворяющие тождеству:
cos 2 cos 2 cos 2 1
• Из тождества найдём неизвестный
направляющий косинус со знаками плюс
и минус. Искомые уравнения двух
прямых: x x0
y y0 z z0
cos
cos
cos
16
Алгоритм решения задачи 2
• г) Нормальный вектор N =(A,B,C)
плоскости Ax + By + Cz + D = 0
• является направляющим вектором
искомой прямой.
• Поэтому канонические уравнения
искомой прямой можно записать:
x x0 y y 0 z z 0
A
B
C
17
Алгоритм решения задачи 3
Пусть A1x+B1y+C1z+D1=0 и A2x+B2y+C2z+D2=0 – уравнения
любых двух различных плоскостей, содержащих прямую ℓ .
Тогда координаты любой точки прямой ℓ удовлетворяют
одновременно обоим уравнениям, т.е. являются решениями
системы
A 1x B 1 y C 1z D 1 0 ,
(1)
A x B y C z D 0.
2
2
2
2
Систему (1) называют общими
пространстве.
уравнениями
прямой
18
в
Алгоритм решения задачи 3
Пусть прямая ℓ задана общими уравнениями:
A 1x B 1 y C 1z D 1 0 ,
(1)
A x B y C z D 0.
2
2
2
2
Чтобы записать канонические (параметрические) уравнения
этой прямой, необходимо найти её направляющий вектор и
координаты какой-нибудь точки M0(x0;y0;z0) на прямой.
Координаты точки M0 – это одно из решений системы (1).
Направляющий вектор [ N1 , N 2 ]
где N1 { A1; B1; C 1} и N 2 { A 2 ; B2 ; C2 } – нормальные
векторы к плоскостям 1 и 2 , уравнения которых входят
в общие уравнения прямой.
N1
1
19
Алгоритм решения задачи 4
20
21
Алгоритм решения задачи 4
ОПРЕДЕЛЕНИЕ. Углом между прямой ℓ и плоскостью λ называется угол φ
между прямой ℓ и её проекцией на плоскость λ .
Из определения следует, что угол между прямой и плоскостью всегда
острый.
1
N
Следовательно,
sin cos
N,
N
M0
22
Алгоритм решения задачи 5
ЗАДАЧА 5. Пусть плоскость λ задана общим уравнением
Ax + By + Cz + D = 0 ,
M0(x0;y0;z0) – точка, не принадлежащая плоскости λ .
Найти расстояние от точки M0 до плоскости λ .
M0
N
d
M1
d
( N, M1M 0 )
N
Ax0 By0 Cz0 D
A2 B 2 C 2
23
x x0 y y 0 z z 0
Пусть дана прямая :
и M 1 ( x 1, y 1, z 1 ) –
p
m
n
точка, не принадлежащая этой прямой.
ЗАДАЧА 5. Найти расстояние от точки до прямой в пространстве.
Обозначим: {m; n; p} – направляющий вектор прямой ,
M 0 ( x 0 , y 0 , z 0 ) – точка на прямой ,
d – расстояние от точки M 1 до .
M1
d
M0
Получаем:
d
, M
0M1
.
24
Алгоритм решения задач 6 и 7
• Для построения поверхностей
применяют метод параллельных сечений.
• Полагают одну из переменных в
уравнении равной нулю или константе
• и выясняют, какие кривые получаются в
координатных плоскостях
• или в плоскостях, параллельных
координатным плоскостям.
25
Алгоритм решения задач 6 и 7
Также можно, выделив полные
квадраты переменных в
уравнении,
• получить канонические
уравнения
• поверхностей второго порядка.
•
26
Поверхности второго порядка
(задачи 6 и 7)
Поверхностью второго порядка называется геометрическое
место точек в пространстве, декартовы координаты которых
удовлетворяют уравнению
F(x,y,z) = 0, где F(x,y,z) –
многочлен степени 2.
в общем случае уравнение поверхности 2-го порядка имеет
вид:
a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz+2a10x+2a20y+2a30z+a00=0 .
Поверхности второго порядка делятся на
1) вырожденные
и
2) невырожденные
Вырожденные поверхности второго порядка это плоскости и
точки, которые задаются уравнением второй степени. Если
уравнению второго порядка не удовлетворяет ни одна точка
пространства, то тоже говорят, что уравнение определяет
вырожденную поверхность (мнимую поверхность второго
порядка).
Невырожденными
поверхности
второго
порядка
подразделяются на пять типов.
27
1. Эллипсоид
ОПРЕДЕЛЕНИЕ. Эллипсоидом называется геометрическое
место точек пространства, координаты которых в
некоторой декартовой системе координат удовлетворяют
уравнению
x2 y2 z2
(1)
2 2 1,
2
a
b
c
где a, b, c – положительные константы.
Система координат, в которой эллипсоид имеет уравнение (1)
называется его канонической системой координат, а
уравнение (1) – каноническим уравнением эллипсоида.
28
z
C2
A1
B1
x
A2
B2
y
C1
Величины a, b и c называются полуосями эллипсоида.
Если все они различны, то эллипсоид называется трехостным.
Если две из трех полуосей равны, эллипсоид является
поверхностью вращения.
Он получается в результате
вращения эллипса вокруг одной из своих осей.
29
Эллипсоид, у которого все три полуоси равны, называют
сферой.
Каноническое уравнение сферы принято записывать в виде
x2 + y 2 + z2 = r2 ,
где r – величина полуосей, которая называется радиусом
сферы.
С геометрической точки зрения, сфера – геометрическое место
точек пространства, равноудаленных (на расстояние r) от
некоторой фиксированной точки (называемой центром). В
канонической системе координат сферы, центр – начало
координат.
30
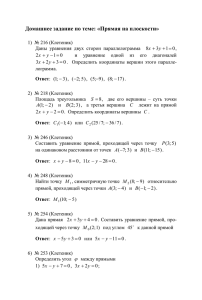
2. Гиперболоиды
ОПРЕДЕЛЕНИЕ. Однополостным гиперболоидом называется
геометрическое место точек пространства, координаты
которых в некоторой декартовой системе координат
удовлетворяют уравнению
x2 y 2 z 2
(2)
2 2 1 ,
2
a
b
c
где a, b, c – положительные константы.
Система координат, в которой однополостный гиперболоид
имеет уравнение (2) называется его канонической системой
координат, а уравнение (2) – каноническим уравнением
однополостного гиперболоида.
31
Величины a, b и c называются
полуосями
однополостного
гиперболоида.
Если
a=b,
то
однополосный
гиперболоид
является
поверхностью вращения.
Он
получается в результате вращения
гиперболы
y2 z2
2 1
2
b
c
вокруг своей мнимой оси.
z
a
x
b
y
Замечание. Уравнения
x2 y2 z 2
x2 y 2 z 2
2 2 1 и 2 2 2 1
2
a
b
c
a
b
c
тоже определяют однополостные
гиперболоиды, но они «вытянуты»
вдоль оси Oy и Ox соответственно.
32
ОПРЕДЕЛЕНИЕ. Двуполостным гиперболоидом называется
геометрическое место точек пространства, координаты
которых в некоторой декартовой системе координат
удовлетворяют уравнению
x2 y 2 z 2
(3)
2 2 1 ,
2
a
b
c
где a, b, c – положительные константы.
Система координат, в которой двуполостный гиперболоид имеет
уравнение (3) называется его канонической системой
координат, а уравнение (3) – каноническим уравнением
двуполостного гиперболоида.
33
z
c
y
x
Величины a, b и c называются
полуосями
двуполостного
гиперболоида.
Если
a=b,
то
двуполостный
гиперболоид
является
поверхностью вращения.
Он
получается в результате вращения
гиперболы
y2 z2
2 2 1
b
c
вокруг своей действительной оси.
Замечание. Уравнения
x2 y2 z 2
x2 y 2 z 2
2 2 1 и 2 2 2 1
2
a
b
c
a
b
c
тоже определяют двуполостные
гиперболоиды, но они «вытянуты»
вдоль оси Oy и Ox соответственно.
34
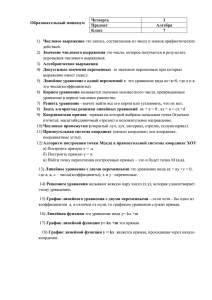
3. Конус
ОПРЕДЕЛЕНИЕ. Конусом называется геометрическое место
точек пространства, координаты которых в некоторой
декартовой системе координат удовлетворяют уравнению
x2 y 2 z 2
(4)
2 2 0,
2
a
b
c
где a, b, c – положительные константы.
Система координат, в которой конус имеет уравнение (4)
называется его канонической системой координат, а
уравнение (4) – каноническим уравнением конуса.
35
z
y
x
Величины a, b и c называются
полуосями
конуса.
Центр
симметрии
O называется
вершиной конуса.
Если a=b, то конус является
поверхностью вращения.
Он
получается
в
результате
вращения прямой
c
z y
вокруг оси Oz . b
Замечание. Уравнения
x2 y 2 z 2
x2 y 2 z 2
2 2 0 и 2 2 2 0
2
a
b
c
a
b
c
тоже определяют конусы, но они
«вытянуты» вдоль оси Oy и Ox
соответственно.
36
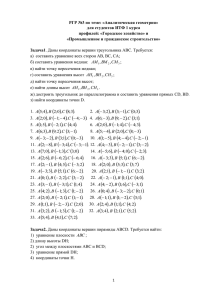
4. Параболоиды
ОПРЕДЕЛЕНИЕ. Эллиптическим параболоидом называется
геометрическое место точек пространства, координаты
которых в некоторой декартовой системе координат
удовлетворяют уравнению
x2 y 2
(5)
2 2z ,
2
a
b
где a, b – положительные константы.
Система координат, в которой эллиптический параболоид имеет
уравнение (5) называется его канонической системой
координат, а уравнение (5) – каноническим уравнением
эллиптического параболоида.
37
Величины a и b называются
z
параметрами параболоида. Точка O
называется вершиной параболоида.
Если a=b, то параболоид является
поверхностью вращения.
Он
получается в результате вращения
параболы y 2 2b 2 z вокруг оси Oz.
x2 y 2
Замечания: 1) Уравнение 2 2 2 z
a
b
тоже
определяет
эллиптический
параболоид, но «развернутый» вниз.
y
2) Уравнения
2
2
x
z
y2 z2
2 2 y и 2 2 2 x
2
a
c
b
c
x
определяют эллиптические параболоиды,
с осями симметрии
Oy
и
Ox
соответственно.
Эллиптический параболоид это поверхность, которая получается
при движении одной параболы вдоль другой (вершина
параболы скользит по параболе, оси подвижной и неподвижной
38
параболы параллельны, ветви направлены в одну сторону).
ОПРЕДЕЛЕНИЕ. Гиперболическим параболоидом называется
геометрическое место точек пространства, координаты
которых в некоторой декартовой системе координат
удовлетворяют уравнению
x2 y 2
(6)
2 2z ,
2
a
b
где a, b – положительные константы.
Система координат, в которой гиперболический параболоид
имеет уравнение (6) называется его канонической системой
координат, а уравнение (6) – каноническим уравнением
гиперболического параболоида.
39
z
Величины a и b называются
параметрами параболоида.
Замечания: 1) Уравнение
x2 y 2
2 2 z
2
a
b
тоже определяет параболоид,
но «развернутый» вниз.
2) Уравнения
z 2 x2
y2 z2
2 2 y и 2 2 2 x
2
b
c
y c a
определяют
параболоиды,
x
«вытянутые» вдоль осей Oz
и Oy соответственно.
Гиперболический параболоид это поверхность, которая
получается при движении одной параболы вдоль другой
(вершина параболы скользит по параболе, оси подвижной и
неподвижной параболы параллельны, ветви направлены
в
40
разные стороны).
5. Цилиндры
ОПРЕДЕЛЕНИЕ. Цилиндрической поверхностью (цилиндром)
называется поверхность, которую описывает прямая
(называемая образующей), перемещающаяся параллельно
самой себе вдоль некоторой кривой (называемой
направляющей) .
Цилиндры называют по виду направляющей: круговые,
эллиптические, параболические, гиперболические.
z
z
y
x
y
x
41
Цилиндр
в некоторой декартовой системе координат
задается уравнением,
в которое не входит одна из координат.
Кривая,
которую определяет это уравнение
в соответствующей координатной плоскости,
является направляющей цилиндра;
а образующая – параллельна оси отсутствующей
координаты.
42
СПАСИБО ЗА
ВНИМАНИЕ
43