Баллистические задачи группировки спутников
реклама

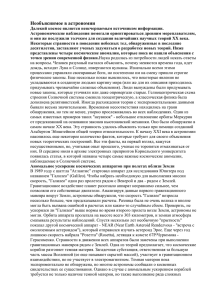
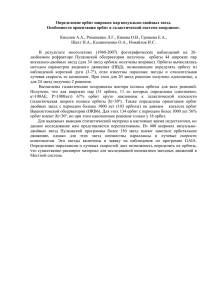
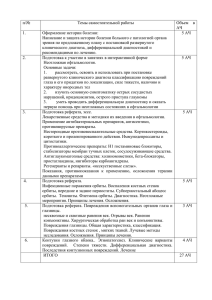
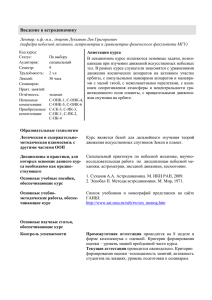
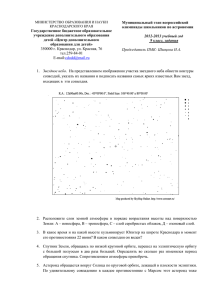
Баллистические задачи группировки спутников сельскохозяйственного назначения Н.А.Эйсмонт, В.Н.Назаров выездной семинар «Механика, управление и информация» Таруса , 10-12 декабря 2008 г. Исходные требования. ежесуточное покрытие всей поверхности Земли с широтой более 35 градусов, при этом соседние полосы наблюдения на этих широтах должны перекрывать друг друга по ширине не менее, чем на 10%, а экваториальные области должны покрываться не менее, чем на 90 %; средний (с учетом сезонных колебаний) угол от восходящего узла орбиты до проекции Солнца на экватор должен составлять 45 градусов (т.е. местное время на долготе восходящего узла орбиты должно составлять 9 часов); максимальный угол между местной вертикалью наблюдаемой точки и направлением на аппарат составляет 30 градусов, этим углом и высотой орбиты определяется ширина полосы наблюдения; относительное положение аппаратов группировки должно сохраняться в течение всего времени ее существования в рабочем режиме. 2 Используемые угловые параметры Местная вертикаль в крайней точке Wi D Точка на трассе W Крайняя точка полосы наблюдения Wb 3 Параметры группировки из трех аппаратов h I P V S Wb W Wi D (км) (град.) (мин.) (км/с) (град.) (град.) (км) (град.) (град). 600 700 800 900 4 97.51 97.90 98.30 98.72 96.539 98.624 100.723 102.838 7.5617 7.5081 7.4555 7.4041 19.721 20.145 20.572 21.001 3.451 383.7 32.09 35.53 5.176 575.5 42.56 47.74 3.525 393.0 28.82 32.34 5.286 587.7 38.92 44.21 3.600 400.3 26.21 29.81 5.400 600.4 35.90 41.30 3.675 408.6 24.10 27.77 5.513 613.0 33.36 38.87 Траектории трех КА в течении суток 0 — 60 С.Ш. 0 — 30 С.Ш. 0 —0 0 — 30 Ю.Ш. 0 — 60 Ю.Ш. 150 5 0 З.Д. 120 0 З.Д. | | | | | 0 90 З.Д. 0 60 З.Д. 30 0 | | З.Д. 0 0 В.Д. 300В.Д. 0 60 В.Д. | | | | 0 90 В.Д. 120 0 В.Д. 1500В.Д. Траектории и зоны наблюдения трех КА в течении суток 6 Траектории и зоны наблюдения освещенных областей трех КА в течении суток 0 — 60 С.Ш. 0 — 30 С.Ш. 0 —0 0 — 30 Ю.Ш. 0 — 60 Ю.Ш. | 150 7 | 0 З.Д. 120 | 0 З.Д. | 0 90 З.Д. | 0 60 З.Д. 30 0 | | З.Д. 0 0 В.Д. 300В.Д. | | 0 60 В.Д. | | 0 90 В.Д. 120 0 В.Д. 1500В.Д. Траектории двух КА в течении суток 0 — 60 С.Ш. 0 — 30 С.Ш. —0 0 0 — 30 Ю.Ш. 0 — 60 Ю.Ш. | 150 8 | 0 З.Д. | 0 120 З.Д. | 0 90 З.Д. 600З.Д. | 30 0 | | З.Д. 0 0 В.Д. 30 | 0 В.Д. 600В.Д. | 900В.Д. | 1200В.Д. | 1500В.Д. Траектории и зоны наблюдения двух КА в течении суток 9 Траектории и зоны наблюдения освещенных областей двух КА в течении суток 0 — 60 С.Ш. 0 — 30 С.Ш. 0 —0 0 — 30 Ю.Ш. 0 — 60 Ю.Ш. | 150 10 | 0 0 З.Д. 120 З.Д. | | 0 90 З.Д. | 0 60 З.Д. 30 0 | З.Д. 00В.Д. | | 0 30 В.Д. 60 | 0 В.Д. 90 | | 0 В.Д. 120 0 В.Д. 1500В.Д. Фрагмент орбит и зон покрытия группировки из трех спутников в приэкваториальной области 400С.Ш. 300С.Ш. 200С.Ш. 100С.Ш. 00 100Ю.Ш. 500В.Д. 11 600В.Д. 700В.Д. 800В.Д. 900В.Д. 1000В.Д. 1100В.Д. 1200В.Д. Фрагмент орбит и зон покрытия группировки из двух спутников в приэкваториальной области 400С.Ш. 300С.Ш. 200С.Ш. 100С.Ш. 00 100Ю.Ш. 500В.Д. 12 600В.Д. 700В.Д. 800В.Д. 900В.Д. 1000В.Д. 1100В.Д. 1200В.Д. Фрагмент трасс орбит группировки из трех КА в зоне видимости ППИ в районе Новосибирска 05-Фев-2010 11:33 05-Фев-2010 12:06 05-Фев-2010 12:39 05-Фев-2010 11:21 05-Фев-2010 12:28 05-Фев-2010 11:55 13 Фрагмент трасс орбит группировки из двух КА в зоне видимости ППИ в районе Новосибирска 05-Фев-2010 11:33 05-Фев-2010 10:45 05-Фев-2010 10:33 05-Фев-2010 11:22 14 Пример сценария выведения на ССО нескольких КА носителем РОКОТ 15 Масса полезной нагрузки, кг Зависимость массы полезной нагрузки от наклонения высоты орбиты для носителя РОКОТ ССО Орбита ожидания 99.50 Орбита ожидания 96.70 Высота круговой орбиты, км 16 Зависимость массы полезной нагрузки от наклонения высоты орбиты для РН Космос-3М Масса полезной нагрузки (кг) ССО Высота круговой орбиты (км) 17 Масса, кг. Зависимость массы полезной нагрузки от наклонения высоты орбиты для РН ДНЕПР Высота, км. 18 Зависимость массы полезной нагрузки от наклонения высоты орбиты для РН Старт-1 19 Точности выведения КА Космос-3М (круговая орбита 200 км): по периоду ± 20 сек по наклонению ± 3 угловых минуты ДНЕПР 20 по высоте орбиты ± 4 км (что соответствует +- 5 секундам по периоду) по наклонению ± 2.4 угловых минуты по прямому восхождению восходящего узла ± 3 угловых минуты Поддержание параметров орбит (1/2) В пересчете на ошибки в скорости ошибки в периоде в 5 с означают 2 м/с в скорости, для коррекции ошибки в наклонении в 3 минуты потребуется 6.5 м/с характеристической скорости. Кроме того, необходимо предусмотреть расход рабочего тела на поддержание относительного положения аппаратов в группировке. Если позволить постепенное снижение орбиты группировки целиком (например, на 20 км за 5 лет), то можно сэкономить около 10 м/с на орбите высотой 700 км, однако, следует предусмотреть не менее 1 м/с на 5 лет на коррекцию ошибок в процессе изначального построения группировки и в дальнейших операциях ее поддержания. 21 Поддержание параметров орбит (2/2) Тем самым обосновывается необходимость установки двигателей коррекции на аппаратах группировки с запасом рабочего тела, соответствующим 7.5 м/с с учетом совмещения коррекции периода и наклонения. Для аппарата массой 150 кг с газореактивным двигателем с удельной тягой 650 секунд требуется около 1.8 кг рабочего тела (воздуха), чтобы сообщить ему этот импульс скорости. Масса баллонов двигательной установки для хранения воздуха не менее 5 кг. Масса снаряженной двигательной установки не менее 7 кг. 22 Оценки точности знания и прогнозирования орбит Точности знания параметров орбит аппаратов определяются составом наземных и бортовых средств траекторных измерений, а также используемых моделей движения спутников. При современном уровне перечисленных трех компонентов максимальные погрешности знания координат аппаратов могут оставаться в пределах 10 м. Отметим, что такая точность достижима при использовании бортовых средств навигации, использующих GPS (ГЛОНАСС). Система определения положения аппаратов может базироваться на GPS только, при этом на борту аппарата вычисляются параметры орбиты, которые, по существу могут использоваться для прогноза положения спутника на несколько витков вперед, при прогнозе на виток вперед ошибка вдоль орбиты может достигать 100 м. Примерно те же точности получаются при наземных траекторных измерениях. В случае полного отказа и бортовых приемников GPS, и традиционных, с использованием наземных станций, измерений возможно применение стандартных средств радиолокационного контроля Космоса. Но погрешность знания координат аппаратов в этом случае заметно выше - около 1 км. 23 Заключение. Как следует из предыдущего анализа, с технической точки зрения наиболее удобно и просто строить группировку путем запуска аппаратов одним носителем и их фазовым разведением аппаратов с помощью последней ступени носителя. Все упомянутые выше носители, за исключением Старта-1, позволяют использовать такую схему. При этом характеристики доступных носителей и планируемые массы наших аппаратов дают возможность реализации попутного запуска и в рамках этой схемы. Однако даже в этом случае аппараты следует снабдить двигательными установками для парирования ошибок при изначальном построении группировки и для последующего поддержания ее заданной конфигурации. Для расширения возможностей выбора носителей и их отдельных пусков, следует предусмотреть возможность необходимого разведения аппаратов после запуска с использованием только их собственных двигательных установок. Тем более это необходимо при запуске аппаратов в режиме, когда группировка строится более чем одним запуском. 24