Кибернетические системы
реклама

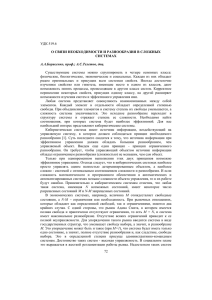
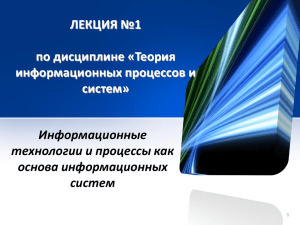
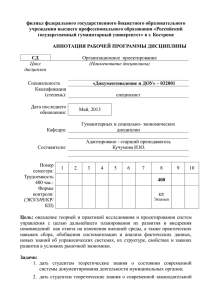
Лекция 4. Кибернетические системы Содержание лекции: 1. Понятие кибернетической системы 2. Закон необходимого разнообразия 3. Кибернетическая система как форма представления систем Кибернетические системы © Н.М. Светлов, 2006-2010 1/11 1. Понятие кибернетической системы • Система управления, или кибернетическая система, характеризуется: – целью управления; – объектом управления (управляемой подсистемой); – функцией управления: • оптимизация • стабилизация • слежение (мониторинг); – факторами неопределённости • Процесс управления можно представить как процесс снятия энтропии управляемой подсистемы воздействием со стороны управляющей подсистемы Кибернетические системы © Н.М. Светлов, 2006-2010 3/11 Структура кибернетической системы Внешние воздействия Разомкнутый контур управления – [мониторинг] Система управления Результат управления (выходной сигнал) Управляемая подсистема Цель управления Управляющая подсистема Управляющее воздействие Обратная связь (замкнутый контур управления) – [стабилизация] Кибернетические системы © Н.М. Светлов, 2006-2010 4/11 1. Понятие кибернетической системы Характеристики системы управления Управляемость • характеристика системы управления, отражающая способность управляющей подсистемы снижать энтропию управляемой подсистемы • может быть охарактеризована долей снятой энтропии в общей энтропии управляемой подсистемы (до акта управления) • находится в обратной зависимости со сложностью управляемой подсистемы Достижимость • характеристика системы управления, решающей задачу оптимизации • отражает способность управляющей подсистемы достичь требуемых характеристик выходного сигнала • выражается показателями эффективности: • отношение выходного сигнала к значению некоторой входной переменной; • отношение достигнутого выходного сигнала к его оптимальному значению. Устойчивость • характеристика системы управления, решающей задачу стабилизации • отражает способность управляющей подсистемы поддерживать характеристики выходного сигнала, задаваемые целью управления • может быть выражена: • абсолютным либо относительным отклонением от заданного значения; • вероятностью выхода за пределы заданного диапазона Кибернетические системы © Н.М. Светлов, 2006-2010 5/11 2. Закон необходимого разнообразия Система может принять одно состояние из трёх Система 1 может принять одно состояние из трёх Система 2 может принять одно состояние из 24 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? Неопределённость меньше Система не может принять одно состояние из трёх Система приняла одно состояние из трёх ? ? ? ? ? Неопределённость наибольшая Неопределённость меньше Неопределённости нет Система 1 может принять одно состояние из трёх с равной вероятностью Первое состояние вероятнее Первое состояние намного вероятнее ⅓ ⅔ 0,98 ⅓ ⅙ 0,01 ⅓ ⅙ 0,01 Неопределённость больше Неопределённость наибольшая Кибернетические системы © Н.М. Светлов, 2006-2010 Неопределённость меньше Неопределённость ещё меньше 6/11 2. Закон необходимого разнообразия n H pi log2 pi i 1 i – номер состояния n – число состояний pi – вероятность состояния i H=1,585 H=1 H=0 H=1,252 H=0,161 H=1,585 H=4,585 H=1,585 Единица измерения энтропии - БИТ Кибернетические системы © Н.М. Светлов, 2006-2010 7/11 2. Закон необходимого разнообразия Если состояния системы равновероятны, то H=log2 N, где N – число состояний системы Энтропия объединённой системы: • равна сумме энтропий её подсистем, если подсистемы независимы • меньше суммы энтропий подсистем, если подсистемы влияют друг на друга Если известно, в каком состоянии находится система, её энтропия равна нулю Кибернетические системы © Н.М. Светлов, 2006-2010 8/11 2. Закон необходимого разнообразия Система может принять одно состояние из трёх Воздействие 1 Система не может принять одно состояние из трёх Воздействие 2 Система приняла одно состояние из трёх ? ? ? Снято 0,585 бит ? Снят 1 бит ? Неопределённость наибольшая Неопределённость меньше H=1,585 H=1 Кибернетические системы © Н.М. Светлов, 2006-2010 Неопределённости нет H=0 9/11 2. Закон необходимого разнообразия Энтропия управляемой подсистемы может быть снята полностью лишь в том случае, если энтропия управляющей подсистемы не меньше энтропии управляемой подсистемы (У. Эшби) Менее сложная система не может полностью контролировать более сложную Кибернетические системы © Н.М. Светлов, 2006-2010 10/11 3. Кибернетическая система как форма представления систем Система Кибернетическая система Алгоритмическая система Другие формы представления Целенаправленная система Кибернетические системы © Н.М. Светлов, 2006-2010 Централизованная система Оптимальная система Децентрализованная (конкурентная) система Неоптимальная система Равновесная система 11/11 Неравновеcная система