Измерение свободы систем
реклама

Измерение свободы
систем
Лекция 6.
Содержание лекции:
1.
Анализ содержания категории «свобода»
2.
Определение свободы как системной категории
3.
Количественная мера свободы
4.
Значение свободы для адаптивных систем
Измерение свободы систем
© Н.М. Светлов, 2006-2011
1/18
1. Анализ содержания категории
«свобода»
O
O
Измерение свободы систем
© Н.М. Светлов, 2006-2011
3/18
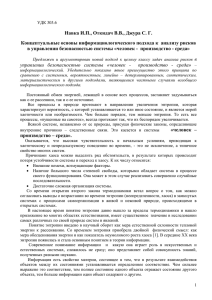
1. Анализ содержания категории
«свобода»
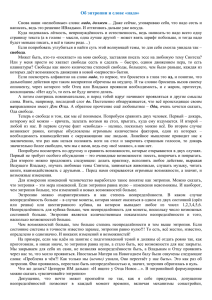
Энтропия состояний,
достижимых в данных
условиях
условияхсреды
средыH1
Энтропия состояний, не
приводящих к гибели H2
Энтропия состояний,
возможных при данном
управляющем
воздействии H3
H ≥ H1 ≥ H2 ≥ H3 ≥
≥ H4; H4 = 0
Полная энтропия
системы H
Состояния,
которые приведут
к гибели системы
Состояния, не
достижимые в
данных
условиях среды
Состояния, которые исключаются
алгоритмом управления
Состояние, достигнутое в действительности H4
Измерение свободы систем
© Н.М. Светлов, 2006-2011
Не
реализовавшиеся
состояния
4/18
категории «свобода»
1. Анализ содержания
Категория свободы в теории систем
© Н.М. Светлов, 2006-2010
Понятие
энтропии
предполагает
представление
объекта в форме
системы.
Следовательно, понятие
свободы, как частный случай
понятия энтропии, тоже
предполагает представление
объекта в форме системы.
Понятие энтропии применимо к
любой системе
Понятие свободы ассоциируется с
системой управления, т.е.
с кибернетической системой.
5/18
2. Определение свободы
Свобода – энтропия системы в заданных
условиях среды
I.
применимо к любой дискретной системе
Свобода – энтропия управляющей
подсистемы в заданных условиях среды
II.
применимо к любой дискретной
кибернетической системе
отражает способность системы достигать
цель управления
не учитывает влияния условий среды на
управляемую подсистему
Измерение свободы систем
© Н.М. Светлов, 2006-2011
6/18
2. Определение свободы
Свобода управляющей подсистемы – это её
энтропия в случае, если заданы:
III.
множество {X, U, Q}
–
•
•
•
–
–
X – множество переменных системы;
U – множество переменных среды;
Q – множество отношений, связывающих переменные из
множества X UU ;
значения переменных из множества X,
соответствующие предшествующему моменту
времени;
значения переменных из множества U,
соответствующие предшествующему моменту
времени.
Измерение свободы систем
© Н.М. Светлов, 2006-2011
7/18
3. Количественная мера свободы
Абсолютные (бит)
1.
применимы к дискретным системам
допускают обобщение на системы с непрерывными переменными, если
условно сопоставить одно состояние дискр.с. единичному интервалу
вариации непр.с.
тогда для дробного числа состояний энтропия оказывается отрицательной
отражают: (I) разнообразие реакций, (II) свободу
управления, но не дают представления об управляемости
Относительные (бит/бит)
2.
•
•
отношение энтропии управляющей подсистемы к полной
энтропии в данных условиях среды (HY /H)
отношение энтропии управляющей и управляемой подсистем
(HY / HR)
применимы к дискретным системам, но в предельнойlimN (HY /H)
limN (HY /HR)
форме могут также применяться к системам с
бесконечным числом состояний
отражают управляемость, но ничего не говорят о
разнообразии управляющих воздействий
Измерение свободы систем
© Н.М. Светлов, 2006-2011
8/18
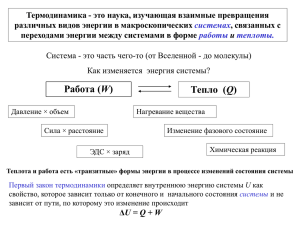
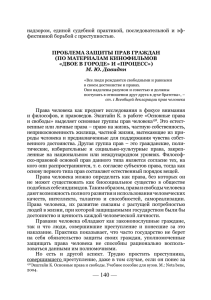
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды A: все управляющие воздействия возможны
HR(Y=1) = 2
HR(Y=2) = 0
Полная энтропия H = 31/8
Остаточная энтропия HR = 11/8
HY /H = 0,64
HR /H = 0,36
HR(Y=3) = 1
HR(Y=4) = 1½
Энтропия управления HY = 2
HY / (H – HY) = 1,78
Измерение свободы систем
© Н.М. Светлов, 2006-2011
9/18
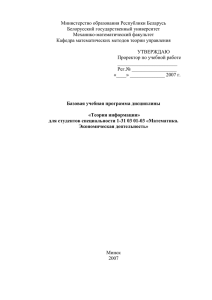
3. Количественная мера свободы
Расчёт полной энтропии:
а) вычисляем вероятности каждого из возможных состояний кибернетической
системы (в данном случае имеется 10 возможных состояний)
1
2
3
4
A
1/4
1/4
1/4
1/4
I
(1/4)/4
II
(1/4)/4
III
(1/4)/4
(1/4)/4
(1/2)/4
(1/4)/4
(1/2)/4
IV
(1/4)/4
(1)/4
(1/2)/4
б) вычисляем pi log2(pi)
1
2
3
4
A
1/4
1/4
1/4
1/4
I
1/4
0
0
1/4
II
1/4
0
3/8
1/4
III
1/4
0
0
3/8
IV
1/4
1/2
3/8
0
Измерение свободы систем
© Н.М. Светлов, 2006-2011
1
1/2
3/4
7/8
3 1/8
10/18
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды B: исключаются управляющие воздействия 3 и 4.
HR(Y=1) = 2
HR(Y=2) = 0
Полная энтропия H = 2
Остаточная энтропия HR = 1
HY /H = 0,50
HR /H = 0,50
Энтропия управления HY = 1
HY / (H – HY) = 1,00
Измерение свободы систем
© Н.М. Светлов, 2006-2011
11/18
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды C: исключаются управляющие воздействия 1 и 2.
HR(Y=3) = 1
HR(Y=4) = 1½
Полная энтропия H = 2¼
Остаточная энтропия HR = 1¼
HY /H = 0,44
HR /H = 0,56
Энтропия управления HY = 1
HY / (H – HY) = 0,80
Измерение свободы систем
© Н.М. Светлов, 2006-2011
12/18
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды D: исключаются управляющие воздействия 2 и 3.
HR(Y=1) = 2
HR(Y=4) = 1½
Полная энтропия H = 2¾
Остаточная энтропия HR = 1¾
HY /H = 0,36
HR /H = 0,64
Энтропия управления HY = 1
HY / (H – HY) = 0,57
Измерение свободы систем
© Н.М. Светлов, 2006-2011
13/18
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды E: исключаются управляющие воздействия 1 и 4.
HR(Y=2) = 0
HR(Y=3) = 1
Полная энтропия H = 1½
Остаточная энтропия HR = ½
HY /H = 0,67
HR /H = 0,33
Энтропия управления HY = 1
HY / (H – HY) = 2,00
Измерение свободы систем
© Н.М. Светлов, 2006-2011
14/18
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды F: свобода управления отсутствует, Y = 1.
HR(Y=1) = 2
Полная энтропия H = 2
Остаточная энтропия HR = 2
HY /H = 0
HR /H = 1
Энтропия управления HY = 0
HY / (H – HY) = 0
Измерение свободы систем
© Н.М. Светлов, 2006-2011
15/18
3. Количественная мера свободы
Y = 1…4 – управляющая переменная
R = I…IV – управляемая переменная
Состояние среды G: свобода управления отсутствует, Y = 2.
HR(Y=2) = 0
Полная энтропия H = 0
Остаточная энтропия HR = 0
HY /H = inf
HR /H =
Энтропия управления HY = 0
HY / (H – HY) = inf
Измерение свободы систем
© Н.М. Светлов, 2006-2011
16/18
4. Значение свободы для
адаптивных систем
Если нет оснований предполагать связь между свободой
и степенью благоприятности доступных состояний, то
•
чем больше свобода системы, тем больше
вероятность того, что наиболее благоприятные
состояния окажутся в числе достижимых
тем больше у неё шансов выжить.
•
Как следствие,
если адаптивная система не имеет информации о том,
какие из состояний для неё наиболее благоприятны, но в
будущем может получить такую информацию, то
наилучшая стратегия её поведения состоит в
максимизации свободы
Измерение свободы систем
© Н.М. Светлов, 2006-2011
17/18
4. Значение свободы для
адаптивных систем
Уяснение сущности свободы в теории систем:
необходимо для понимания цели как системной категории
позволяет разработать количественные методики измерения
свободы
даёт возможность объяснить общие свойства наблюдаемого
поведения разнообразных адаптивных систем
уточняет содержание философских категорий свободы и
необходимости
Измерение свободы систем
© Н.М. Светлов, 2006-2011
18/18