Презентация - Российская ассоциация искусственного интеллекта
advertisement

ГРАНУЛЯРНАЯ
ОНТОЛОГИЯ
ПРОСТРАНСТВА
ДЛЯ КОГНИТИВНЫХ
МОБИЛЬНЫХ РОБОТОВ
Калуцкая Анастасия Петровна
Тарасов Валерий Борисович
МГТУ им. Н.Э.Баумана
k_a_p@rbcmail.ru
tarasov@rk9.bmstu.ru
К 180-летию МГТУ им. Н.Э.Баумана
Поколения роботов
В работах [Попов и Фирдман, 1976; Тимофеев, 1988;
Добрынин, 2006] описаны три поколения роботов:
промышленные,
очувствленные,
интегральные роботы.
Роботы первого поколения работают в простом, строго
фиксированном внешнем мире. Соответственно, модель
внешней среды у них отсутствует. Как следствие,
управляющая программа является жесткой и ее надо менять
даже, когда меняется положение хотя бы одного объекта в
сфере действия промышленного робота. Конечно,
промышленные роботы не являются автономными.
Роботы второго поколения уже являются
очувствленными, т.е. снабжены системой тактильных
датчиков, позволяющих им воспринимать информацию о
мире.
Внешний мир роботов второго поколения уже не является
строго фиксированным, поэтому у них появляются
простейшие, одношаговые планы, которые в основном
сводятся к подстановке конкретных координат в программу
с параметрами. Роботы этого поколения также не обладают
автономностью.
Поколения роботов
(продолжение)
1)
2)
3)
4)
5)
Роботы третьего поколения называются интегральными
(этот термин был предложен Н.Нильсоном) и обладают
определенной степенью интеллектуальности.
Для определения понятия интегральный робот обычно
используют следующие пять групп робототехнических
устройств:
системы восприятия зрительной, слуховой, тактильной и других
типов информации о внешнем мире;
системы воздействия на объекты внешнего мира –
манипуляторы, педипуляторы и пр.;
системы, обеспечивающие перемещение робота – колесные,
гусеничные, шагающие, плавающие, летающие движители и
аппараты;
системы целеполагания и планирования действий робота,
системы решения задач;
системы, обеспечивающие коммуникацию робота с человекомоператором и другими роботами на языках общения различных
уровней, вплоть до естественного языка.
Любой конкретный робот включает в себя сочетание систем,
принадлежащих указанным группам. Это позволяет
классифицировать роботы третьего поколения по степени
интеграции и набору входящих в них систем.
Роботы 4-го поколения – когнитивные агенты
Современные интеллектуальные роботы 4-го поколения должны быть
способными:
а) работать в открытых динамических средах;
б) строить сложные многоцелевые планы поведения на основе
восприятия и оценки внешней ситуации,
в) формировать внутренние предпочтения.
Следовательно, можно утверждать, что мобильные роботы нового
поколения должны иметь статус когнитивного агента.
Когнитивная функция обеспечивает процессы познания роботом
внешнего мира, других агентов, а также его самопознание.
Основными когнитивными процессами являются:
1) процессы восприятия среды,
2) формирования ее обобщенного внутреннего представления,
3) обучения,
4) понимания принципов взаимодействия и поведения.
В докладе главное внимание уделено коммуникативнокогнитивному процессу взаимодействия интеллектуального
робота с человеком на ограниченном естественном языке.
Диалог человека с роботом включает как целеуказания и инструкции,
передаваемые человеком роботу, так и обратную связь – сообщения
робота человеку с просьбой уточнить исходные инструкции, а также
сведения о текущей ситуации или информацию о достижении
поставленной цели
Архитектура робота как когнитивного агента
Главная особенность когнитивного робота,
отличающая его от других интеллектуальных
систем, заключается в том, что он получает
информацию из трех источников:
1) От
ЕЯ
2) От
3) От
человека-оператора на ограниченном
в виде целеуказаний и инструкций;
датчиков сенсорной системы;
собственной базы знаний.
Интеграция этих информационных
процессов является необходимым
условием диалогового управления.
Общий принцип диалогового
управления роботом был
предложен учеными МГТУ им.Н.Э.
Баумана Е.П.Поповым и А.С.Ющенко.
Комбинированная иерархическая схема
информационного взаимодействия
мобильного когнитивного робота со средой
В начальный период перемещения
когнитивного робота
использовать точную информацию
от датчиков бывает часто
нецелесообразно, нерационально
или невозможно.
Поэтому здесь предлагается
двухуровневая комбинированная
схема информационного
взаимодействия когнитивного
робота со средой.
Например, если робот находится на расстоянии более 30 м, то целесообразнее
использовать «грубую» навигацию (на основе лингвистически заданных целеуказаний).
Но для позиционирования робота у станка или автоматизированного склада следует
использовать «точную» навигацию.
Основные характеристики агента
Обычно определение искусственного агента сводится к
выделению некоторого минимального набора его базовых
характеристик, в число которых входят:
1) активность;
2) реактивность;
3) автономность;
4) коммуникативность;
5) интенциональность.
Для когнитивных агентов в этот перечень добавляются такие
качества как формирование мнений и представление знаний,
прогнозирование
ситуации,
принятие
решений
и
планирование действий.
На наш взгляд, ключевым свойством когнитивного агента
необходимо считать способность грануляции информации
как основной подход к работе с НЕ-факторами. Этой
способностью следует наделять как физических агентов,
например, когнитивных роботов, так и программных агентов, в
частности, инфоботов.
Учет и моделирование НЕ-факторов
в информатике и ИИ
Термин «НЕ-факторы», введенный А.С.Нариньяни
(1980), служит для обозначения комплекса факторов,
которые выражаются словами, имеющими негативные
оттенки в естественном языке, слабо отражены в
классической математике, но оказываются
неотъемлемыми характеристиками человеческих знаний.
НЕ-факторы лексически и содержательно отрицают одно
из свойств классических моделей знаний, например,
классической логики предикатов 1-го порядка:
определенность, полноту, непротиворечивость,
точность, однозначность, замкнутость, монотонность,
и пр.
Сегодня моделирование как отдельных НЕ-факторов,
так и взаимосвязей между ними становится одной из
ключевых задач искусственного интеллекта, в особенности,
теории агентов и многоагентных систем.
Александр Семенович
Нариньяни (1937-2010)
«Недоопределенность в системе
представления и обработки знаний»;
«Между знанием и незнанием:
наивная топография»
Международная конференция
«ДИАЛОГ. Компьютерная
лингвистика и интеллектуальные
технологии»
Разработка проблематики НЕ-факторов уже не ограничивается
промежуточной областью между знанием и незнанием, «наивную топографию»
которой очертил А.С.Нариньяни, а охватывает куда более обширную сферу
построения интеллектуальных систем новых поколений, включая моделирование интенций,
процессов коммуникации, кооперации, координации, переговоров и др.
Новости искусственного интеллекта.2004.№2
Темы номера: Нечеткие множества в экономике, финансах и бизнесе
Моделирование НЕ-факторов: ключевое направление ИИ в начале XXI-го века
Содержание
СЛОВО РЕДАКТОРА
К 90-летию со дня рождения Г.С.Поспелова
К пятнадцатилетию образования Советской Ассоциации искусственного интеллекта
НАУЧНЫЙ ОБЗОР
Захаров В.Н. Архитектуры интеллектуальных управляющих систем на базе
современных информационных технологий
НЕЧЕТКИЕ МНОЖЕСТВА В ЭКОНОМИКЕ, ФИНАНСАХ И БИЗНЕСЕ
Недосекин А.О. Применение нечетких множеств в бизнесе, экономике и финансах
(Послесловие к международной конференции FSSCEF-2004)
Дымова Л.Г., Севастьянов П.В. Мягкая математика в оптимизации биржевой
торговли
ДИСКУССИОННАЯ ТРИБУНА
Нариньяни А.С. НЕ-факторы: краткое введение
Валькман Ю.Р. Моделирование НЕ-факторов: основа интеллектуализации
компьютерных технологий
Рыбина Г.В. Приобретение знаний, содержащих НЕ-факторы
Тарасов В.Б. НЕ-факторы: от семиотического анализа к методам
формализации
ХРОНИКА
Батыршин И.З. Международная конференция по нечетким множествам и мягким
вычислениям в экономике и финансах FSSCEF-2004
ПИСЬМО В РЕДАКЦИЮ
Предложение об организации IFEL (International Fuzzy Economics Lab)
Новые книги
«НЕ-факторы: краткое введение»
А.С.Нариньяни поставил задачу детальной спецификации
комплекса НЕ-факторов и построения для него некоторого
аналога таблицы Менделеева.
Он также отметил важные методологические принципы
исследования НЕ-факторов:
1. Принцип доформального исследования основных механизмов
и примеров функционирования НЕ-факторов в естественном
языке («от лингвистики к логике и математике НЕ-факторов).
2. Принцип разработки мягких искусственных языков и
моделей, обеспечивающих должный уровень адекватности
выражения прагматики этих факторов.
3. Принцип изучения динамических взаимосвязей между
отдельными НЕ-факторами и группами НЕ-факторов как
своего рода проекциями доступных нам фрагментов всего
комплекса развивающейся системы знаний.
Сам А.С.Нарияньяни и его группа в наибольшей степени изучили и
формализовали такой НЕ-фактор как недоопределенность.
Инструментальная среда
«Моделирование НЕ-факторов: основа
интеллектуализации компьютерных
технологий»
Ю.Р.Валькман отстаивает более широкую позицию, связанную
с идеей комплексного моделирования НЕ-факторов как условия
имитации в искусственных системах особенностей работы
естественного интеллекта.
Им раскрыта центральная роль НЕ-факторов в организации образного
мышления.
Предложен вариант классификации НЕ-факторов в пространстве
«НЕ-фактор – моделируемый объект – метод моделирования».
Высказана гипотеза о существовании как «универсальных» (общих
для разных проблемных областей), так и специальных (характерных
только для отдельной конкретной предметной области) НЕ-факторов.
Экономические НЕ-факторы
Тарасов В.Б. НЕ-факторы в экономике знаний и сетевых организациях// Реинжиниринг
бизнес-процессов на основе современных информационных технологий. Системы
управления знаниями. Сборник научных трудов XI-й Российской научно-практической
конференции (РБП-СУЗ-2008, Москва, МЭСИ, 23-24 апреля 2008 г.). – М.: МЭСИ, 2008. –
С.247-253.
Психологические НЕ-факторы, в частности, недизъюнктивность:
Тарасов В.Б. Развитие синергетического подхода в искусственном интеллекте: новые
горизонты математической психологии// Математическая психология: современное
состояние и перспективы. – М.: ИПРАН, 2010.
Моделирование НЕ-факторов:
магистральное направление развития ИИ
в первой четверти XXI-го века
В этой же статье Ю.Р.Валькмана был сформулирован, без
преувеличения, один из основных вопросов современного ИИ:
может ли система называться интеллектуальной, если
она не моделирует какие-либо НЕ-факторы?
Появление общей теории неопределенности Л.Заде,
опирающейся на обобщенные ограничения, бурное развитие
вычислений со словами и, особенно, гранулярных вычислений
делают очевидным ответ на этот вопрос:
Интеллектуальная система нового поколения должна быть
способной к учету и моделированию комплекса НЕ-факторов,
«пронизывающих» ее взаимодействие со средой.
Информационные НЕ-факторы
НЕ-ФАКТОРЫ
НЕПОЛНОТА
ПРОТИВОРЕЧИВОСТЬ
НЕТОЧНОСТЬ
НЕОДНОЗНАЧНОСТЬ
НЕЧЕТКОСТЬ
1. Неполнота информации – локальное восприятие среды.
2. Неточность – интервальное ограничение по точности восприятия.
3. Противоречивость информации, поступающей из разных
источников.
4. Неоднозначность предполагает наличие некоторого распределения
информации (вероятности, возможности, правдоподобия,
уверенности и пр.).
5. Нечеткость. Нечеткое значение приписывается лингвистическим,
качественным оценкам.
НЕ-факторы развития
НЕ-ФАКТОРЫ РАЗВИТИЯ
НЕОБРАТИМОСТЬ
НЕРАВНОВЕСНОСТЬ НЕУСТОЙЧИВОСТЬ НЕЛИНЕЙНОСТЬ
1. Необратимость – направленность эволюции (во времени)
Необратимость выступает как всеобщая асимметрия природы,
как процесс постоянного нарушения симметрии при развитии.
Необратимость Кооперативность
2. Неравновесность – порождение порядка из хаоса, причина
спонтанного структурогенеза в системах
Неравновесность Упорядочение
3. Неустойчивость – несохранение близости состояний системы в ходе ее
эволюции. Неустойчивое состояние системы – необходимое условие ее развития.
Связь неустойчивости и эволюции через бифуркации
Неустойчивость Самоорганизация
4. Нелинейность – нарушение аддитивности в процессе развития системы
(принцип суперпозиции не работает)
Нелинейность Интеграция
Нечеткое множество
Нечеткое множество – это совокупность
упорядоченных пар А = {(x, A(x)}, xХ,
A(x)[0,1] [Zadeh, 1965] или
нечеткое множество есть функция A: Х[0,1].
L-нечеткое множество А: X L [Goguen, 1967],
где L – решетка.
Допущения о природе принадлежности
а) допущение о полноте принадлежности:
любой элемент либо принадлежит, либо не
принадлежит множеству: третье исключено
б) допущение о различимости принадлежности::
любые два элемента множества различимы на
шкале принадлежности.
в) допущение о взаимной компенсации:
при возрастании степени принадлежности
убывает степень непринадлежности и наоборот:
, причем + = 1
Лотфи Заде
Важнейшие идеи и результаты Л.Заде в 70е – 90-е годы XX-го века
Формальная модель лингвистической переменной
Zadeh L.A. The Concept of a Linguistic Variable and its Application to Approximate
Reasoning. Parts 1 and 2// Information Sciences. – 1975. – Vol.8. – P.199-249, 301-357.
Идеи плюрализма и локальности в логике
Bellman R., Zadeh L.A. Local and Fuzzy Logics// Modern Uses of Multiple-Valued Logics/
Ed. by J.M.Dunn and G.Epstein. – Dordrecht: D.Reidel, 1977. – P.105-165.
Теория возможности
Zadeh L.A. Fuzzy Sets as a Basis for a Theory of Possibility// Fuzzy Sets and Systems. –
1978. – Vol.1. – P. 3-28
Теория приближенных рассуждений
Zadeh L.A. A Theory of Approximate Reasoning// Machine Intelligence/ Ed. by J. Hayes,
D. Michie and L.I. Mikulich. – New York: Halstead Press, 1979. – P.149-194.
Концепция мягких вычислений
Zadeh L.A. Fuzzy Logic, Neural Network and Soft Computing// Communications of the ACM.
– 1994. – Vol.37, №3. – P.77-84.
Концепция вычислений со словами
Zadeh L.A. Fuzzy Logic = Computing With Words// IEEE Transactions on Fuzzy Systems. –
1996. – Vol. 4. – P. 103-111.
Теория нечетких информационных гранул
Zadeh L.A. Toward a Theory of Fuzzy Information Granulation and its Centrality in Human
Reasoning and Fuzzy Logic// Fuzzy Sets and Systems. – 1997. – Vol. 90. – P.111-127.
Грануляция информации
В нечёткой логике, как и в естественном языке, все понятия
градуированы по степени истинности. Кроме того, в нечёткой
логике все гранулировано.
Под гранулой понимается группа объектов, объединяемых
неразличимостью, сходством, близостью (т.е. отношениями,
обладающими, по крайней мере, свойствами симметричности
и рефлексивности).
Примеры сингулярных и
гранулярных значений
Разработка системы онтологий
для когнитивных роботов.
Общее понятие онтологии
Значительный вклад в теорию и проектирование онтологий
внесли Т.Грубер, Н.Гуарино, Р.Мизогучи, Р.Студер,
Т.А.Гаврилова, А.С.Клещев, А.В.Смирнов, С.В.Смирнов и др.
Онтология – это явное и формализованное определение
структуры некоторой проблемной области (темы).
Подобное описание всегда опирается на концептуализацию
этой области, которая обычно задается в виде системы
исходных объектов (понятий), отношений между ними и
положений (аксиом).
Поэтому онтологию часто понимают как «спецификацию
разделяемой разными людьми концептуализации» или,
иначе, отождествляют с набором сосуществующих
концептуальных моделей предметной области.
По сути, онтологии отражают соглашения о единых
способах построения и использования концептуализации.
Модифицированная схема
взаимосвязи онтологий
По сравнению с А.В.Смирнов и др. Онтологии в системах искусственного интеллекта:
способы построения и организации (часть 1)// Новости искусственного интеллекта. –
2002. – №1. – С.3-13.
Онтологии в системе моделей
представления знаний
Когнитивный фрейм как система
нечетких гранул
В работе вводится понятие когнитивного фрейма как варианта
нечеткой грануляции информации.
Когнитивный фрейм есть нечеткий фрейм, слотам которого
соответствуют не точные, а нечеткие или лингвистические значения.
Когнитивный фрейм можно рассматривать как результат грануляции
информации, описанной с помощью лингвистической переменной, где
мы сопоставляем терм-множеству семейство нечетких множеств.
В этом случае он состоит из означенных, нормальных нечетких
множеств Ф={A1,…, An}, где любые два соседних множества
имеют область перекрытия.
Здесь область рассуждений X должна удовлетворять условиям
нечеткого покрытия (-покрытия) и семантической состоятельности
(термин, введенный В.Педричем).
В работе это условие сводится к следующим трем ограничениям:
а) количество элементов множества Ф невелико; в соответствии с
результатами экспериментов Миллера оно находится в пределах
7+2;
б) каждое Ai является унимодальным и нормальным нечетким
множеством;
в) соседние нечеткие множества Ai, Aj должны иметь небольшую
область перекрытия; обычно полагается, что Ai Aj 0.5.
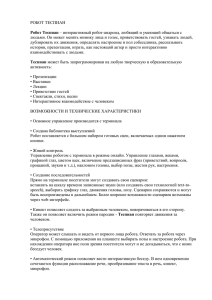
Пример когнитивного фрейма
В качестве примера нечеткой грануляции можно взять
совокупность лингвистических значений лингвистической
переменной «Ошибка навигации». Здесь 7 термов образуют
покрытие терм-множества, но не его разбиение, поскольку
соседние термы пересекаются.
Гранулированные значения ЛП: 0 – нулевая ошибка; +1 – малая положительная
ошибка; +2 – средняя положительная ошибка; +3 – большая положительная
ошибка; –1 – малая отрицательная ошибка; –2 – средняя отрицательная ошибка; –
3 – большая отрицательная ошибка.
Онтологическая структура
грануляции информации
Предлагается описывать общую схему грануляции
информации когнитивным агентом пятеркой
GR = X, G, C, M, T,
где X – область рассуждений;
G – семейство информационных гранул;
C – множество обобщенных ограничений;
каждый тип ограничения определяет требования к
выбору метода грануляции;
M – множество формальных методов грануляции;
T – множество переходов между уровнями
грануляции (преобразований гранул).
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ
ГРАНУЛЯРНЫХ ОНТОЛОГИЙ В
РОБОТОТЕХНИКЕ
1.Недоопределенные множества А.С.Нариньяни
Программирование в ограничениях
Карпов В.Э. О некоторых особенностях применения недоопределенных моделей в робототехнике//
Интегрированные модели и мягкие вычисления в искусственном интеллекте. Сборник трудов V-й
Международной научно-практической конференции (Коломна, 28-30 мая 2009 г.).– М.: Физматлит, 2009
– Т.1. – С.520-532.
Нечеткие онтологии
Нечеткая алгебраическая система есть тройка
FAS = (X), (R), Ω,
где (X)= {(x, μ) x X, μ: X[0,1]} – множество нечетких объектов;
(R)= {(r, φ)rR: Xn[0,1]} – множество нечетких отношений
между объектами; Ω – множество операций над нечеткими объектами,
здесь Ω = (T, S, n).
При Ω = приходим к понятию нечеткой реляционной системы.
Соответственно в работе предложено нечеткое представление «легкой»
онтологии как пары
ONT = (X), (R),
где (X) – множество нечетких категорий или понятий предметной
области, (R)–множество нечетких отношений между понятиями
предметной области.
Когда определено также множество аксиом (проведена аксиоматизация
предметной области), онтология становится «весомой», т.е.
представляется тройкой ONT’ = (X), (R), AX.
Другой вариант определения весомых онтологий – введение множества
Ф ={f} – конечного множества функций интерпретации, заданных на понятиях
и/или отношениях онтологии ONT’’, f: Dn[0,1], D – область интерпретации.
Здесь значения f представляют собой числа из интервала [0,1], в частности, их
можно понимать как значения вероятности, возможности или необходимости.
Дальнейшее обобщение связано с лингвистическими оценками истинности.
Мереология Ст.Лесьневского:
пример аксиоматизации онтологии
Мереологией называется учение о частях целого. Как известно,
в классической теории множеств активно используются постулат
различимости элементов, а также понятие пустого множества.
В отличие от этого мереология:
1) делает акцент на целостности множества как «коллективного класса»,
что позволяет считать ее прямой предшественницей теории
грануляции Л.Заде;
2) основана на единственном отношении «быть частью»;
3) обходится без пустого множества.
Мереология Лесьневского (партономия) опирается на следующие
аксиомы, которые положены в основу ряда моделей пространства:
1. Любой предмет есть часть самого себя (аксиома рефлексивности).
2. Две различные вещи не могут быть частями друг друга:
если P – часть предмета Q, то Q не есть часть предмета P
(аксиома антисимметричности).
3. Если P есть часть предмета Q, а Q – часть предмета R, то P есть часть
предмета R (аксиома транзитивности).
Таким образом, отношение «часть–целое» рефлексивно,
антисимметрично и транзитивно, т.е. является отношением нестрогого
порядка.
Нечеткие парадигматические отношения
Будем представлять онтологию четверкой
ONT* = (X), (R), At, C ,
где At – множество нечетких свойств (значений) понятий,
а C – множество нечетких ограничений.
Общие отношения для различных онтологий:
1) генеративные отношения «есть некоторый» (is_a);
2) таксономические отношения («класс-подкласс», «класс-экземпляр);
3) родо-видовые отношения;
4) партономические (или мереологические) отношения
(«часть–целое»);
5) отношения наследования или генеалогические связи
(«предок-потомок»).
Эти отношения могут быть как четкими, так и нечеткими, например, нечеткие
генеративные отношения «есть некоторый со степенью μ» (is_a_with_ μ).
Методы грануляции информации:
разбиение на основе нечеткого
отношения эквивалентности
Построим нечеткую гранулу на базе нечеткого отношения
эквивалентности. Пусть R – нечеткое бинарное отношение с
функцией принадлежности R: XX [0,1]. Будем называть
его нечетким отношением эквивалентности E, если
выполняются следующие условия:
1) μR(x, x)=1,(x, x)XX (рефлексивность);
2) μR(x, y)= μR(y, x), (x, y), ( y, x) XX (симметричность);
3) μR(x, z) ≥ max {min (μR(x,y), μR(y, z)}, (x, z), (x, y), (y, z)
XX (транзитивность).
Пара APR=X, E называется нечетким пространством
приближений.
Определим множество -уровня (сечение) нечеткого
отношения R в виде R={(x,y) R(x,y)}, (x,y)XX,
01. Нечеткое разбиение множества можно произвести
путем разложения нечеткого отношения эквивалентности на
-уровни.
Методы грануляции информации:
разбиение на основе расстояний
Понятие гранулы можно задать как окрестность элемента (точки) x.
Напомним, что на числовой оси окрестность точки – любой
интервал (открытый промежуток), содержащий данную точку.
Пусть X, – нечеткое метрическое пространство. В этом случае
окрестностью с центром в точке y называют множество
Аε = { xX ρ (x, y) ε }
Таким образом, каждой точке xX можно поставить в соответствие
некоторое (четкое или нечеткое) подмножество, называемое
окрестностью точки, а семейство таких подмножеств образует
систему окрестностей.
В этом ключе можно интерпретировать соотношение
неопределенностей Гейзенберга как принцип гранулярности:
точное измерение импульса частицы позволяет определить только
«окрестность» (гранулу) положений частицы, и наоборот.
По сути, понятия разбиения и окрестности являются
примитивами языка гранулярных вычислений, где им
соответствует термин «гранула»
Пространство как онтологическая категория
Онтология пространства – это определение множества
пространственных примитивов и множества базовых
пространственных отношений.
Метод пространственной грануляции определяет способ
связывания логических утверждений с пространством.
Логические утверждения, истинность которых зависит от
пространства , называются пространственными утверждениями.
В основе построения онтологии пространства лежит выбор базовой
модели (теории) пространства.
Модели пространства Ньютона и Лейбница
В качестве двух классических моделей
пространства можно указать пространство
Ньютона и пространство Лейбница.
В отличие от теории «пустого» пространства
Ньютона, Лейбниц предложил реляционную
концепцию пространства, согласно которой
пространство связывается с порядком
взаимного расположения и сосуществования
в нем различных тел.
По Лейбницу, пространство представляется
неявно, через отношения между объектами.
Обычно в нем вводится определенная
метрика или топология, чтобы оценивать
размеры объектов и расстояния между ними.
Построение онтологии пространства
предполагает определение:
- множества пространственных примитивов;
- множества базовых пространственных
отношений;
- задание структуры пространства – области
интерпретации примитивов и ее свойств
в виде аксиом теории пространства,
исходя из требований предметной области
(в данном случае, когнитивной
робототехники).
Свойства
пространства
по Ньютону
Свойства реального
пространства
для когнитивного
мобильного робота
1)
бесконечность
1*) конечность
2)
непрерывность
2*) дискретность
3) однородность
3*) неоднородность
4) изотропность
4*) неизотропность
5)
5*) шкалированность
неподвижность
Исходя
из сравнительного анализа свойств
абсолютного пространства Ньютона и
реального локального пространства робота в
работе для построения онтологии пространства
использована базовая модель Лейбница
Поскольку, по Лейбницу реальное физическое
пространство интерпретируют как множество
объектов, в качестве пространственных
примитивов можно использовать точки или
области пространства.
Онтология пространства
Построение онтологии пространства – это определение множества
пространственных примитивов и множества базовых
пространственных отношений, задание структуры пространства –
области интерпретации пространственных примитивов и
установление ее свойств в виде аксиом теории пространства.
o
-
-
Выбор примитивов пространства: локусы
точки;
прямые;
плоскости;
области (двухмерные и трехмерные интервалы).
Кандрашина Е.Ю., Литвинцева Л.В.,
Поспелов Д.А. Представление знаний о
времени и пространстве в
интеллектуальных системах. – М.:
Наука, 1989.
-
Выбор базовых отношений между примитивами:
Качественные (сравнительные) отношения
Робот 1 находится ближе к объекту, чем робот 2
Количественные (метрические) отношения
Робот находится примерно в 10 м от объекта
o
Задание свойств пространства (структуры пространства)
o
-
-
Непрерывность – дискретность;
Неограниченность – ограниченность;
Ненаправленность (для того, чтобы ориентироваться в пространстве, необходимо задать
искусственно систему координат);
Однородность
Система пространственных отношений
для робота
Нечеткие абсолютные и относительные шкалы
I. Отношения на плоскости.
Статическая логика
1. Относительные расстояния:
R1 – быть дальше (робот a находится дальше от объекта,
чем робот b);
R2 – быть ближе (робот a находится ближе к
препятствию, чем робот b);
R3 – быть равноудаленным;
R4 – быть рядом.
Свойства отношений R1 и R2: антисимметричность, антирефлексивность,
транзитивность (отношения строгого порядка).
R3 – симметричность; R4 – симметричность (при одинаковых размерах)
Система пространственных отношений
для робота (продолжение)
2. Относительные направления:
R5 – быть спереди (напротив);
R6 – быть сзади;
R7 – быть сбоку;
R8 – быть правее;
R9 – быть левее.
Свойства отношений R5 –R9 : антирефлексивность и транзитивность
(отношения квазипорядка)
3. Относительные размеры
R10 – быть больше (размеры препятствия больше размеров
робота);
R11 – быть меньше (размеры робота меньше размера
входного отверстия люка);
R12 – быть равным.
Свойства отношений R10 и R11 : антисимметричность,
антирефлексивность, транзитивность (отношения строгого порядка)
Свойства отношения R12 – симметричность, рефлексивность,
транзитивность (отношение тождества)
Система пространственных отношений
для робота (окончание)
Взаимные отношения
R13 – быть внутри (робот находится внутри помещения);
R14 – быть вне (робот находится вне зоны видимости)
R15 – быть перед (робот находится перед складом)
R16 – быть за (робот находится за территорией цеха)
R17 – соприкасаться (робот схватом держит объект)
Свойства отношений R13 и R14 : антисимметричность,
антирефлексивность, транзитивность (отношения строгого порядка)
Свойства отношений R15 и R16: антирефлексивность, транзитивность
(отношения квазипорядка)
Свойство отношения R17: симметричность
Далее для определения взаимных отношений между областями
используется подход мереологии Ст.Лесьневского
Перечисленные отношения используются для построения
псевдофизической пространственной логики.
Свойства пространственных отношений
Обозначение отношений
R1 – быть дальше
R2 – быть ближе
R3 – быть равноудаленным
R4 – быть рядом
R5 – быть спереди
(напротив)
R6 – быть сзади
R7 – быть сбоку
R8 – быть правее
R9 – быть левее
R10 – быть больше
R11 – быть меньше
R12 – быть равным
R13 – быть внутри
R14 – быть вне
R15 – быть перед
Название
отношений
Р
С
Строгий порядок
Строгий порядок
Т
АР
АС
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Строгий
квазипорядок
Строгий
квазипорядок
Строгий
квазипорядок
Строгий
квазипорядок
Строгий
квазипорядок
Строгий порядок
Строгий порядок
Тождество
Строгий порядок
Строгий порядок
Строгий
+
+
Онтология с примитивами вида областей
Для онтологий, в которых примитивами являются области,
можно выделить три главных типа отношений –
геометрическое («конгруэнтность»), мереологическое
(«быть частью») и топологическое («связность»).
Конгруэнтность позволяет определить отношение сходства
между областями. В геометрии две фигуры называются
конгруэнтными, если одну из них можно перевести в другую
с помощью движения.
В свою очередь, понятие связности есть математическое
выражение интуитивного представления о целостности
разных геометрических фигур. Топологическое отношение
связности рефлексивно, симметрично и монотонно.
В настоящее время построение общей онтологии
пространства идет по линии интеграции подходов мереологии
и топологии: Мереология + Топология = Мереотопология
При этом система мереотопологии строится на основе
одного-единственного отношения связности.
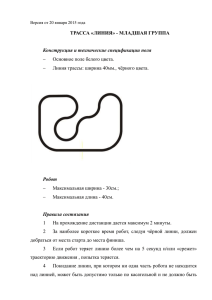
Мереотопологические
пространственные отношения
Название
Обозна
чения
Несвязност
ь
DC
Часть
P
Формальная запись
C (a, b)
c C (c, a) C (c, b)
P(a, b) P(b, a)
Собственна
я
часть
PP
Равенство
EQ
Перекрыти
е
O
O(a, b) P(a, b) P(b, a)
Частичное
перекрыти
е
PO
C (a, b) O(a, b)
Внешняя
EC
P (a, b) P (b, a )
c P (c, a ) P (c, b)
Графическая
иллюстрация
О РОЛИ ПРОСТРАНСТВА АЛЕКСАНДРОВА
ПРИ ПОСТРОЕНИИ МЕРЕОТОПОЛОГИЙ
В русле построения топологических онтологий ключевое
значение приобретает взаимно однозначное соответствие
между конечными топологическими пространствами T0 и
конечными упорядоченными множествами, а также его
обобщение для пространства Александрова.
Пространство Александрова – это топологическое
пространство, такое, что каждая его точка имеет
минимальную окрестность или, эквивалентно,
единственную минимальную базу.
Это равносильно следующему определению:
Конечное топологическое пространство называют
пространством Александрова, если в нем произвольное
семейство пересечений открытых множеств является
открытым.
Это пространство тесно связано с понятием
квазиупорядоченного множества (т.е. множества с
заданным на нем отношением квазипорядка, для которого
выполняются условия транзитивности и рефлексивности).
Можно показать, что пространство Александрова
индуцируется отношением квазипорядка.
Нечеткие расширения
мереотопологических отношений
На базе формул свойств нечетких отношений определим ряд
нечетких топологических отношений как расширения
отношений из приведенной таблицы.
Например, нечеткое отношение связности C(a,b) симметрично
и рефлексивно; введем отношение пороговой связности с
помощью свойств пороговой рефлексивности и пороговой
симметричности, а также слабой связности через слабую
рефлексивность и пороговую симметричность.
В свою очередь, нечеткое отношение несвязности определим
через операцию отрицания DC(a,b) = 1 – C(a,b).
Нечеткое отношение «быть частью»
P(a,b) = min{max {1– C(c,a), C(c,b)}
c
Нечеткое отношение «быть собственной частью» можно
определить как PP(a,b) = = T{P(a,b), 1–P(b,a)}.
Например, PP(a,b) = = min{P(a,b),1–P(b,a)}.
О СВЯЗИ ГРАНУЛЯРНЫХ ОНТОЛОГИЙ
С ПСЕВДОФИЗИЧЕСКИМИ ЛОГИКАМИ
НЕЧЕТКАЯ ЛОГИКА В ШИРОКОМ СМЫСЛЕ
Нечеткая логика, как правило, понимается в
двух смыслах: широком и узком.
Основоположник теории нечетких множеств
Л.Заде стал инициатором широкой трактовки
нечеткой логики как системы формальных
средств обработки естественного языка,
включающую лингвистические переменные,
нечеткие правила и ограничения,
композиционное правило вывода,
гранулирование информации, нечеткую
семантику, вычисления со словами.
Нечеткая семантика Семантика обобщенных
ограничений
Обобщённые ограничения
Для грануляции пространственных отношений
предлагается
комбинация
подходов
логиколингвистического моделирования Д.А. Поспелова с
аппаратом общей теории неопределенности Л.Заде,
основанный на обобщенных ограничениях. Речь
идет о переводе словосочетаний естественного
языка, используемого для речевого задания целей,
на язык обобщенных ограничений (ЯОО)
X isr R,
где X – переменная, R – гибкое, эластичное
ограничение на эту переменную, а isr – переменная
связка, в которой r является переменной, а ее
значение
определяет
способ,
которым
R
ограничивает X.
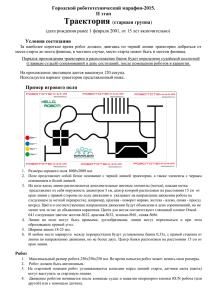
Виды обобщённых ограничений
Обозначение
Тип ограничения
Формальная запись
r: =
Равенство
X=R
r:
Неравенство
XR
r:
Возможностное
ограничение
X is R возможностное
распределение Х
r: v
Истинностное
ограничение
X isv R
r: p
Вероятностное
ограничение
X isp R; вероятностное
распределение X
r: fg
Ограничение нечетким
графиком
X isfg R; Х – функция, R – ее нечеткий
график
r: u
Обычностное
ограничение
X isu R означает, что обычно X is R
Обобщённые ограничения
Основные обобщенные ограничения представляют
собой варианты формализации оценок трех типов:
оценка возможности;
оценка правдоподобия;
оценка истинности.
Для оценки правдоподобия используется вероятность.
Стандартные ограничения:
Двузначное возможностное ограничение: X is C (четкое
множество)
Двузначное истинностное ограничение V(p)=true или
V(p)=false
Вероятностное ограничение X isp R
Обобщенная модель управления
когнитивным роботом на основе
грануляции информации с помощью
обобщенных ограничений