Космическая навигация по пульсарам
реклама

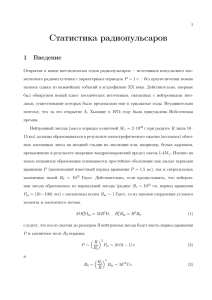
Космическая навигация по пульсарам Александр Родин Пущинская радиоастрономическая обсерватория АКЦ ФИАН [email protected] План доклада 1. Свойства пульсаров. 2. Отличие от спутниковых навигационных систем. 3. Точность регистрации пульсарных импульсов. 4. Принцип определения местоположения. 5. Блок-схема пульсарной навигационной системы. 6. Заключение Отличие от спутниковых навигационных систем (Rodin, Sekido, Ilyasov, Imae, 2006) 1. Сигнал от пульсара не содержит никакой дополнительной информации, кроме собственно периодичности. 2. Пульсары крайне слабы, что приводит к длительным временам накопления для обеспечения приемлемого значения сигнал/шум. 3. До пульсаров хорошо известны только их угловые координаты. Расстояния до пульсаров известны с гораздо худшей точностью. 4. Пульсары обладают собственными нерегулярностями вращения, которые вызываются различными астрофизическими причинами. Такие нерегулярности можно рассматривать как аналог режима избирательного доступа, который не может быть отключён. Свойства пульсаров Плотность потока (1.4 ГГц): от 0.024 до 1100 мЯн (каталог 1771 пульсаров). 1 Ян (Jy) = 10-26 Вт/(м2 Гц) Плотность потока для некоторых пульсаров как функция частоты (Sala, Uruella, Villares et al, 2004). Свойства пульсаров • Период: от 1.39 мс до ~ 8 сек. Большинство миллисекундных пульсаров в двойных системах. У некоторых пульсаров глитчи, . / 108 106 Изменения периода у четырёх рентгеновских пульсаров (White et al, 1995). Свойства пульсаров галактические координаты эклиптические координаты (Sala, Uruella, Villares et al, 2004). Распределение пульсаров по небу Свойства пульсаров Отношение сигнал/шум SNR Aeff S 2kTsys 4 Aeff 3.6 10 2 m Tsys Tsky Tr , Tsky Tgal Tcbg Tsso Отношение с/ш как функция частоты для 15 пульсаров (Sala, Uruella, Villares et al, 2004). 1 S Tsys Jy K , Свойства пульсаров Яркостная температура Галактики на частоте 150 МГц в галактических координатах. Контуры от 200 до 3000К. 10-6 ед./сек/угл.мин2 Свойства пульсаров Карта неба в рентгеновских лучах по данным спутника ROSAT (Snowden et al 1997). Точность регистрации пульсарных импульсов rms 3 W 2 Tk 1 ( BP ) 2 S ~ W / SNR G Tsys – системная температура (К), B – полоса приема (Гц), τ – время накопления (сек), W – ширина импульса (сек), P – период пульсара (сек), S – плотность потока (Ян), G – усиление антенны (Ян/К). Точность регистрации пульсарных импульсов PSR J2124-3358 PSR 1821-24 Принцип определения местоположения (Rodin et al, 2006) задержка Рёмера поправка за сферичность фронта релятивистская поправка A1[k2 k3 ] A2 [k1 k3 ] A3[k1 k2 ] r , k1 [k2 k3 ] где Ai (ki r ). дисперсионная задержка (для радиопульсаров) Принцип определения местоположения Пульсар Pc R вычисляется КА измеряется 2 1 c(t t ) k r k r 2R k SSB r Сферический фронт сигнала Принцип определения местоположения (v k ) c - изменение наблюдаемой частоты вращения пульсара ( k ) c - изменение производной частоты вращения пульсара N t 2 2c - набег вращательной фазы при коррекциях орбиты Необходим акселерометр на борту КА! Принцип определения местоположения d 1 1 dt c2 2 d r 1 2 dt V/c Изменение направления 1% 5% 10% 30' 3° 6° L (k ' V / c) k 1 k 'V / c - коррекция частоты бортового стандарта частоты - учёт аберрации L 1U (1 1 ) v v , 1 0 0 U 0 1 0 , 0 0 1 1 / 2 V2 , 1 2 c V v |V | Блок-схема пульсарной навигационной системы A Pulsar 1 signal Pulsar 1 Space craft B1 Raw data Pulsar 2 Control data B2 Pulsar 3 GPS (GLONASS) satellite Mission control center B3 UTC scale Pulsar list Space craft coordinates and distance TOA data Radio (X-ray) telescope Date processing center Pulsar observation center START Блок-схема пульсарной навигационной системы Enter raw TOA of pulse Transform TOA from spacecraft time scale to SSB scale Removing timing noise dtnoise from TOA Reduction of TOA to SSB Calculation of Ai = c (ti – ti’) and r Estimating deviation of measured position from predicted YES r - rpredict > NO Store the calculation result Orbit correction End of navigation (To space craft) YES END NO Заключение 1. Предложена навигационная система, основанная на приёме сигналов от пульсаров. 2. Определены основные требования к регистрирующей аппаратуре. 3. Разработан алгоритм определения местоположения.