Комплекс средств позиционирования внешних и
реклама

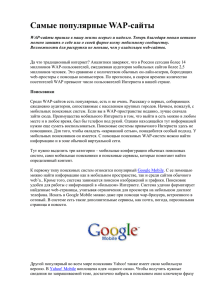
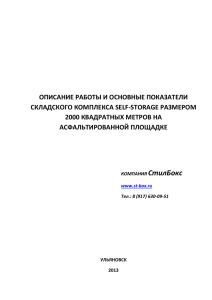
«Комплекс средств позиционирования внешних и внутренних объектов МКС» Доклад Одесского Национального Политехнического Университета на Международной научно-практической конференции по вопросу развития сотрудничества в области исследования космоса и использования космического пространства в мирных целях 3-5 октября г. Москва 2011 г. Основные положения доклада рассмотрены в РКК «Энергия», на КНТС ЦНИИМАШ и в НПП «Звезда». Комплекс средств позиционирования внешних и внутренних объектов (условное название «Hunternet») предназначен для определения местоположения научной аппаратуры (НА), космонавтов, спутников различного назначения запущенных с МКС и других объектов позиционирования (ОП), передачи сигналов управления на ОП, определения вектора скорости ОП, получения фото- видеоинформации об окружающей среде ОП. Данный комплекс, согласно "Протокола рабочего совещания по вопросам российскоукраинского сотрудничества в проведении научных экспериментов на РС МКС от 19-20 октября 2010 г., рекомендован организациямпоставщикам и организациям-участникам космических экспериментов для заключения Соглашения по подготовке и реализации российских экспериментов с участием украинской стороны на РС МКС. Применение комплекса Hunternet возможно в достаточно большом диапазоне – от простейшей идентификации ОП и его местоположения до сложных операций по позиционированию и управлению движением во внестанционном пространстве. Примером сложного использования Hunternet является возможность управления КА в процессе сближения при стыковке, управления внешними минизаводами, в которых отсутствуют микроджиттеры и т.п. Другим примером такого использования является принудительное управление оператором ранцем-спасателем космонавта при нештатных ситуациях. Может быть рассмотрен вопрос об управлением комплексом Hunternet возвращаемыми нанои микро-спутниками в пристанционном пространстве. При построении комплекса Hunternet используются технологии систем безопасности и логистики на основе беспроводных ЛВС. Локализация элементов в беспроводных сетях первоначально применялась исключительно в целях обеспечения безопасности от несанкционированного доступа, т.е. локализации пиратского компьютера. В дальнейшем методики локализации стали применяться в логистике. Существует несколько методов такой локализации: сближение точек доступа (Cell of Origin) триангуляция (triangulation) разность времени распространения волны (TDOA) индикация мощности принятого сигнала (RSSI) Точность локализации при этом достигает 30 см, но может быть повышена за счет увеличения количества WAP и перехода в разрешенный диапазон 5 ГГц до единиц сантиметров. Аппаратура комплекса создается на основе набора разнесенных беспроводных точек доступа (WAP), образующих в качестве фиксированных реперных узлов 3-мерное активное координатное и информационное пространство МКС. Ядром системы является центральный сервер - ПК оператора, связанный с реперными узлами WAP через беспроводную ЛВС (по стандарту IEEE 802.11). После развертывания комплекса производится измерение аппаратной задержки между центральным ПК и точками доступа, которое в дальнейшем учитывается при расчете положения объекта позиционирования (ОП) внутри и вне станции. WAP в реперных узлах обеспечивают функцию сбора информации о расстоянии до ОП (по приведенным выше методикам локализации) и ее передачу на центральный ПК для окончательного расчета координат ОП. Для интеграции ПК оператора ЭУ со служебным бортом предполагается, например, использование ЛВС, что позволит осуществить экипажу получение информации от центрального ПК оператора для внутреннего пользования на РС МКС и обмен данными с ЦУП-М. Красными точками на рисунке обозначены беспроводные точки доступа, расположение и количество которых должно быть определено расчетным и экспериментальным путем. Для наземных и летных экспериментов будет использовано программное обеспечение, объединяющее перечисленные методы и позволяющее избежать влияния искажений за счет отраженного сигнала, многолучевого приема и т.п. Различные варианты таких программного обеспечения успешно применяются, например, в многоэтажных железобетонных зданиях, металлических ангарах-складах, супермаркетах. Авторами доклада были, также, успешно проведены эксперименты по передаче сигналов IEEE 802.11 из изделия 24008 в зал КИС-416 в рамках программы Crew Commander Emergency Bus. На следующем слайде приведен пример передачи изображения из комплексного стенда Российского Сегмента МКС в КИС-416 РКК «Энергия» и обратно по беспроводной ЛВС. На изображении слева помещение КИС-416, справа испытатели внутри комплексного стенда РС МКС. ОП для проведения его позиционирования оснащается, в зависимости от функциональной сложности своего назначения, следующими устройствами идентификации и обмена: - пассивный радиоярлык RFID (для внутристанционного применения на НА, инструментах, приборах, материалах и пр. при малой удаленности), - активный радиоярлык RFID (с автономным питанием для внутристанционного и внестанционного применения на инструментах, приборах, материалах и пр. при большой удаленности), - приемо-передатчик беспроводной ЛВС с устройством сопряжения с системой управления конкретного ОП, - устройство типа бесдисплейного нетбука с автономным питанием, видеокамерой, цифровым фотоаппаратом, позволяющее, кроме выполнения функции RFID для определения координат, принимать/передавать фото/видео информацию об окружающей среде и сигналы управления между оператором и объектом позиционирования. Описание организации работ с применением разрабатываемого комплекса ► ► ► ► ► ► Управление поиском ОП и связью с ним в сети Hunternet осуществляется оператором с центрального ПК. При этом сеть Hunternet, в зависимости от используемого на ОП типа RFID , решает следующие задачи: - определение координат и идентификация ОП, - получение видеоинформации и обмен данными с ОП, - передача оператором сигналов управления движением ОП, - использование в качестве собственно беспроводной ЛВС, со свойственными для нее стандартными функциями. Описание экспериментальной установки Hunternet. ► ► 1. Наземная ЭУ. В состав наземной ЭУ входит набор WAP, центральный ПК оператора, аппаратура ЛВС и набор RFID (включая нетбук с вебкамерой и фотоаппаратом). Испытания проводятся в ОНПУ и на изделии 24008 в КИС-416. Целью испытаний является отработка прикладного программного обеспечения, определение точностных параметров, определение необходимого и достаточного количества WAP, отработка обмена информацией между ОП и центральным ПК оператора. 2. Бортовая ЭУ. Для бортовой ЭУ Hunternet учитываются требования по минимизации аппаратуры в пределах необходимой достаточности для подтверждения характеристик точности позиционирования. В состав бортовой ЭУ входят два негерметизированных WAP, центральный ПК оператора, набор RFID (в том числе один герметизированный на базе нетбука с вебкамерой). Испытания внутри РС МКС проводятся на двух WAP и центральном ПК оператора. Целью испытаний является проверка возможности определения местоположения ОП на оси между двумя WAP по методикам разности времени распространения волны (TDOA) и индикации мощности принятого сигнала (RSSI). Для проведения испытаний при ВКД космонавт выносит герметизированный RFID в точку своей основной задачи выхода. Внутренний WAP возле одного из иллюминаторов связывается с внешним герметизированным RFID. На центральном ПК оператора происходит измерение линейного расстояния до космонавта (априори известное – для сравнения) по методикам разности времени распространения волны (TDOA) и индикации мощности принятого сигнала (RSSI). При этом вебкамера внешнего RFID может передавать, скажем, состояние внешней обшивки в месте работы космонавта и т.п. Поскольку эксперимент при ВКД является попутным, он может быть для подтверждения точности повторен несколько раз. Заключение Целью проведения КЭ по исследованию элементов Hunternet является подтверждение и отработка принципов построения системы в целом и разработка технического предложения по созданию специализированного программного обеспечения. По результатам КЭ может быть принято решение о дальнейшем проведении работ по системе Hunternet. Венедиктов Ю.И. Верхградский Д.А. Копытчук Н.Б. Попов С.А. Спасибо за внимание!