Поиск трехмерных объектов на изображениях на основе динамически формируемых контурных эталонов Ю.Б. Блохинов,
реклама

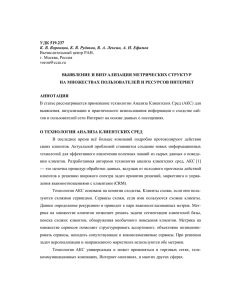
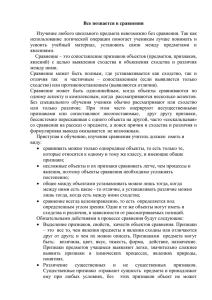
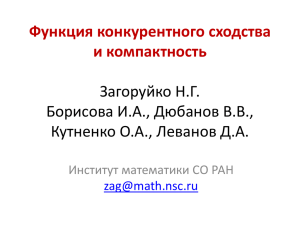
Поиск трехмерных объектов на изображениях на основе динамически формируемых контурных эталонов Ю.Б. Блохинов, А.С. Чернявский ФГУП «ГосНИИАС», Москва [email protected] Постановка задачи Существуют 3D модели ряда наземных объектов, формирующих сцену Имеется цифровое текущее изображение (ТИ), полученное с летательного аппарата Заданы углы обзора и примерная область поиска объектов на изображении Предполагаем, что объект полностью находится в кадре Требуется определить местонахождение искомого объекта на ТИ При этом не использовать информацию о текстуре Модель Текущее изображение По имеющейся информации о точке съемки генерируется конкретный вид эталона объекта Контурные эталоны объектов 1 2 4 3 Для каждого контурного эталона (КЭ) строится функция сходства с ТИ Функция сходства Контурный эталон E (i, j ) размывается фильтром Гаусса В каждой точке находятся нормали к контурному эталону I y (i, j ) ij arctg I x (i, j ) В каждой точке ТИ ищется градиент яркости: I y (m, n) mn arctg I x (m, n) Функция сходства Сходство между эталоном и ТИ в точке (i,j): p(i, j ) f mn ij Итоговая функция сходства D(m, n) p(i, j ) i[ m , m H E ] j[ n , n WE ] Наиболее вероятное расположение Пик функции сходства объекта 50 100 150 200 250 50 100 150 200 250 300 350 Результаты позиционирования сцен по данным летных экспериментов Отличительные особенности ИК-снимков: 1) Узкий динамический диапазон и низкий контраст 2) ИК-снимки имеют меньшие размеры и меньшую разрешающую способность 4000 3500 3000 2500 ТВ 2000 1500 1000 500 0 0 50 100 150 200 250 0 50 100 150 200 250 4000 3500 3000 2500 2000 ИК 1500 1000 500 0 Гистограмма яркости Результаты позиционирования сцен по данным летных экспериментов Было проведено исследование вероятности попадания и точности попадания в прицельную точку в зависимости от уровня шума и степени загораживания Прицельная точка, лежащая на модели объекта (на стене или крыше) задавалась пользователем Параметры зашумления: 1) 2) 3) 4) Нормальный шум: σ от 0 до 50 Импульсный шум: вероятность изменялась от 0 до 0.5 Загораживание прямоугольной областью: от 0% до 50% от площади снимка Изменение углов ориентирования: ±1° от истинных значений Область поиска объекта определяется по известным оценкам ошибок элементов внешнего ориентирования и составляет в среднем 50х50 пикселей Результаты позиционирования сцен по данным летных экспериментов 10 20 30 40 50 60 70 80 90 100 20 40 60 80 100 120 140 10 20 30 40 50 60 70 80 90 100 10 Эталонное изображение Текущее изображение 20 30 40 50 Функция сходства 60 Результаты позиционирования сцен по данным летных экспериментов 10 20 30 40 50 60 70 80 90 20 40 60 80 100 120 140 10 20 30 40 50 60 10 Текущее изображение 20 30 40 50 60 Функция сходства 70 80 Результаты позиционирования сцен по данным летных экспериментов Выводы: 1) Метод поиска, основанный на анализе поля градиентов яркости, успешно работает как на ТВ-, так и на ИК-снимках 2) Вероятность точной локализации объекта превышает 0.9 при всех видах шума, кроме загораживания (от 0.5 до 0.88). В среднем, вероятность локализации для ИК-снимков несколько ниже, чем для ТВ-снимков (0.85 против 0.92). Это связано с небольшими размерами ИК-снимков. 3) Средняя точность локализации (расстояние от истинного до найденного положения прицельной точки) не превышает 2.5 м для всех видов шума, кроме неточно заданных углов ориентирования (для них точность в среднем равна 4.5 м) 5) Вероятность и точность локализации зависят от структуры сцены, например, от степени протяженности объектов (мосты, дороги) Использование нескольких снимков для повышения точности обнаружения Если ТИ сильно зашумлено или объект не помещается целиком на одном снимке, целесообразно использовать несколько снимков одной сцены, сделанных в последовательные моменты времени. Алгоритм сборки сцены по N снимкам состоит из следующих шагов: 1) Поиск прицельного объекта на каждом снимке по отдельности, построение функций сходства 2) Переход из пиксельной системы координат каждого снимка в единую, общую для всех снимков, геодезическую СК (в метрах) 3) Значению функции сходства в каждом пикселе соответствует голос, поданный за положение прицельной точки в трехмерном пространстве 4) Голоса, полученные при анализе N снимков, суммируются в геодезической СК Итог: точка в трехмерном пространстве, получившая больше всего голосов,объявляется найденной прицельной точкой. 10 20 30 40 50 60 70 80 90 100 10 20 30 40 50 60 70 80 90 100 10 20 30 40 50 60 70 80 90 100 10 20 30 40 50 60 70 80 90 100 10 20 30 Если на отдельных снимках объект не виден целиком, то по нескольким снимкам возможно определить точное положение объекта 40 50 60 70 80 90 100 10 20 30 40 50 60 70 80 90 100 10 20 30 40 50 60 70 80 90 100 20 40 60 80 100 Итоговая функция сходства сцены по трем снимкам 120 140 Результат сборки Повышение точности обнаружения (субпиксельность) Нахождение начального приближения Максимизация функции сходства каким-либо итерационным методом путем варьирования углов ориентирования и координат камеры Имеет смысл перейти к векторной модели контурного эталона Функция сходства при изменении угла Выводы Предложенная функция сходства позволяет обнаружить объект на изображении по его контурному эталону Метод успешно испытан на реальных изображениях, полученных в видимом и ИКдиапазоне Есть предпосылки для повышения точности обнаружения, в т.ч. путем использования нескольких снимков с разных точек Повышение точности обнаружения = повышение точности навигационных данных