Устойчивость решений дискретных систем
advertisement

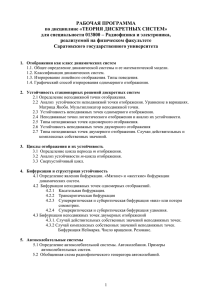
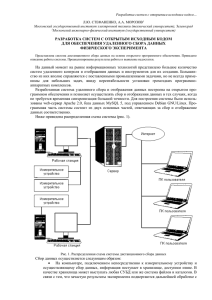
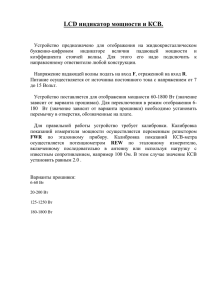
Устойчивость решений дискретных систем В дискретных динамических системах могут существовать частные решения, представляющие собой стационарные, периодические, квазипериодические и * * * * хаотические последовательности ( x0 , x1 , x2 ,..., xn ), которые мы будем обозначать xn*. Рассмотрим первое частное решение дискретной системы – стационарное, или решение в виде неподвижной точки. Определение. Точка x* называется неподвижной точкой отображения F (4), если выполняется следующее условие: x* = F(x*). (5) Это условие означает, что при графической итерации отображения движение при попадании в x* прекращается. Итерации вновь и вновь помещают очередное xn в x*. Решение в виде неподвижной точки еще называется состоянием покоя или состоянием равновесия. Помимо самого факта существования в дискретных системах решений в виде неподвижных точек (состояний покоя или равновесия системы) , важную роль играет информация об их устойчивости или неустойчивости. Слегка толкнем шарик и пронаблюдаем за движением. После совершения нескольких затухающих колебаний шарик вновь займет прежнее положение на дне ямки. Положение равновесия устойчиво: малые возмущения исходного состояния затухают во времени. При любом сколь угодно малом отклонении шарика от состояния равновесия он скатится с вершины. Положение равновесия неустойчиво: малые возмущения исходного состояния нарастают во времени. Устойчивость какого-либо состояния (движения) динамической системы определяется просто: введем небольшое отклонение (возмущение) динамической системы от исследуемого состояния и проанализируем, каким будет ее дальнейшее поведение. Если со временем система вернется в исходное состояние (возмущение затухает), то такое состояние называется устойчивым. Если начальное отклонение нарастает со временем - состояние неустойчиво. Найдем условия устойчивости неподвижной точки x*. В связи с тем, что проблема устойчивости связана с анализом реакции системы на малое возмущение ее состояния, на первом этапе она может быть исследована в рамках линейного приближения. Пусть x = x* + , - отклонение от состояния равновесия, малая по сравнению с x* величина. Тогда отображение (4) примет вид: (6) x* F ( x* ). n 1 n Применяя для правой части (6) разложение в степенной ряд в окрестности неподвижной точки и отбрасывая члены порядка малости выше первого, находим: x * n1 F ( x * ) F x С учетом (5), из соотношения (7) получаем F n1 x n . x* n . x* (7) Производные берутся в точках частного решения, в данном случае в неподвижной точке x*. (8) Введем обозначение aik f i x k . x* Здесь индексы i,k = 1,…, N – размерность отображения (4). Тогда выражение (8) можно переписать в координатной форме (или покомпонентно): N ni 1 a ik nk . (9) k 1 Данное линейное точечное отображение есть линейное дискретное уравнение в вариациях. В матричной форме (9) можно записать в следующем виде: n1 A n . (10) Матрица А с элементами aik является квадратичной и называется матрицей линеаризации или матрицей Якоби. Устойчивость неподвижной точки отображения определяется мультипликаторами k , которые являются собственными значениями матрицы А, или корнями характеристического уравнения: detA E 0. E – единичная матрица. (11) Неподвижная точка x* исходного отображения (4) является устойчивой, если все мультипликаторы k удовлетворяют условию |k| < 1. Если среди мультипликаторов имеются такие, для которых |k| > 1, то неподвижная точка отображения (4) будет неустойчивой. Устойчивость неподвижных точек одномерного отображения Одномерное отображение: xn1 f ( xn ). (12) Пусть x* - неподвижная точка отображения. Введем малое возмущение : xn x* n . Тогда отображение (12) примет вид: xn 1 x* n1 f ( xn ) f ( x* n ). (13) Используя выражения (7), (8), приходим к новому одномерному линейному отображению, описывающему эволюцию малого возмущения неподвижной точки, которое имеет вид: (14) f ( x* ) . n 1 n Из сопоставления выражений (10), (11) и (14) следует, что собственное значение матрицы линеаризации A или мультипликатор неподвижной точки одномерного отображения (12) есть = f (x*). Следовательно, условие устойчивости неподвижной точки x* сводится к выполнению неравенства | f (x*)| < 1. Если | f (x*)| > 1, неподвижная точка неустойчива. Возможные типы поведения неподвижной точки в зависимости от величины и знака производной f (x*). С геометрической точки зрения значения f (x*) – это тангенс угла наклона графика функции последования f( ) в точке x*. Эволюции малого возмущения n соответствует сжатие либо растяжение отрезка, соответствующее отклонению от x*. В малой окрестности неподвижной точки функцию последования можно заменить прямой А, касательной к f(x) в точке x*. Типы неподвижных точек в одномерном отображении Устойчивый обратный узел Устойчивый узел Состояние нейтрально. Переходные значения параметра называются критическими. Им соответствуют точки бифуркации. Неустойчивый узел Неустойчивый обратный узел Если возмущение меняет знак при каждой итерации, то к названию неподвижных точек добавляют слово «обратный». Устойчивость неподвижных точек двумерного отображения (16) (15) (16) (17) (18) (18) (19) (17) (16) (20) (19) (20) (19) (21) (20) (22) (21) Чтобы найти мультипликаторы неподвижных точек отображения или собственные значения матрицы линеаризации, необходимо найти корни характеристического уравнения (11). Для двумерного отображения оно имеет вид: a det c b 0. d (22) Характеристическое уравнение (22) можно переписать в виде 2 ( a d ) ( ad bc ) 0. (23) Корни характеристического уравнения (23) 1,2 (ad ) ( a d )2 ( ad bc ) 2 4 (24) определяют решение системы (20), следовательно, и поведение фазовых траекторий в окрестности неподвижной точки отображения (15). Типы неподвижных точек в двумерном отображении Как видно из выражения (24), собственные значения 1,2 могут быть действительными числами или комплексно сопряженными. Как было показано в случае одномерного отображения, характер устойчивости неподвижной точки меняется при |1,2| = 1. Поэтому удобно характеризовать неподвижную точку, изображая расположение собственных чисел 1 и 2 на комплексной плоскости относительно единичной окружности. Im Пара комплексно сопряженных значений |1,2| < 1, имеющие равные действительные части, а их мнимые части различаются только знаком. Im 1 Re 1,2 Im 2 Re Положение точек окружности означает, что внутри Re 2 1, 2 Im 2 1, 2 1. Случай действительных 1 и 2. 1. 1 < -1 и 2 < -1 – неустойчивый обратный узел. Траектория расходится от неподвижной точки по обоим собственным векторам, причем отклонение каждый раз меняет свой знак. 2. -1 < 1 < 0 и 2 < -1 – обратное седло. Траектория сходится по одному из собственных векторов, но расходится по другому. Отклонение меняет знак при каждой итерации. 3. 0 < 1 < +1 и 2 < -1 – неориентируемое седло 1. По одному из направлений траектория расходится, причем отклонение меняет знак на каждой итерации. По другому направлению отклонение монотонно убывает. 4. 1 > +1 и 2 < -1 – неустойчивый неориентируемый узел. Траектория расходится от неподвижной точки по обоим направлениям, причем по одному из них отклонение меняет знак на каждой итерации. 5. -1 < 1 < 0 и -1 < 2 < 0 – устойчивый обратный узел. Меняя знак отклонения на каждой итерации, возмущенная траектория сходится к неподвижной точке по любому направлению. 6. 0 < 1 < +1 и -1 < 2 < 0 – устойчивый неориентируемый узел. То же, что и 5-й случай, но по одному из собственных направлений отклонение монотонно убывает, не изменяя своего знака. 7. 1 > +1 и -1 < 2 < 0 – неориентируемое седло 2. То же, что и 3-й случай, но отклонение меняет знак на каждой итерации для устойчивого направления. 8. 0 < 1 > +1 и 0 < 2 < +1 – устойчивый узел. Траектория монотонно сходится к неподвижной точке по любому направлению. 9. 1 > +1 и 0 < 2 < +1 – седло. Траектория монотонно сходится к неподвижной точке по одному направлению, но разбегается по другому. 10. 1 > +1 и 2 > +1 – неустойчивый узел. Траектория монотонно удаляется от неподвижной точки по любому направлению. Отклонение не меняет знака. Таким образом, при действительных 1 и 2 мы имеем 2 типа неподвижных точек: 1) узел, когда оба собственных значения по модулю либо больше, либо меньше единицы, 2) седло, когда одно из собственных значений по модулю больше единицы, а другое – меньше. В зависимости от знаков 1 и 2 к названию неподвижной точки может добавляться характеристика типа сходимости: «обратный», если оба мультипликатора отрицательны, либо «неориентируемый», если 1 и 2 имеют разные знаки. Случай комплексно сопряженных 1 и 2. В данном случае неподвижная точка является фокусом. Если r Re 2 1,2 Im 2 1,2 1, то неподвижная точка называется устойчивым фокусом. В этом случае точки итерации исходного отображения (15) лежат на скручивающейся спирали с центром в неподвижной точке, которая в этом случае устойчива. Если r > 1, то спираль раскручивается, удаляясь от неустойчивой неподвижной точки, которая в данном случае является неустойчивым фокусом. Характер сходимости возмущенной траектории к неподвижной точке меняется в зависимости от знака Re 1,2. Случай r = 1 соответствует пограничной ситуации, когда возмущенная траектория не удаляется и не приближается к неподвижной точке, вращаясь вокруг нее с некоторой угловой скоростью. Устойчивый фокус Неустойчивый фокус Циклы отображения и их устойчивость Рассмотрим 2-й тип частного решения дискретной системы – периодическое решение. Определение. Последовательность точек x*1, x*2, …, x*m называется циклом периода m или m-циклом точечного отображения, если они удовлетворяют условиям x*n+m= F (x*n), x*2 = F(x*1), x*3= F(x*2), …, x*1 = F(x*m), причем никакие два элемента в наборе x*1, x*2, …, x*m не совпадают. Точки цикла x*1, x*2, …, x*m называют иногда m-кратными неподвижными точками и для них можно записать: x*1 = F(x*m) = F(F(F…F(x*1)…)) = F (m)(x*1). Из приведенных определений следует, что неподвижная точка отображения является циклом периода 1 (когда m = 1). Устойчивость m-цикла дискретного отображения можно исследовав на устойчивость неподвижные точки отображения: G ( m , x n ) F ( m ) ( x n ). определить, (25) По аналогии с алгоритмом анализа на устойчивость однократной неподвижной точки (см. формулы (6)-(11)) получаем, что мультипликаторы km m-кратной неподвижной точки отображения (25) или m-цикла отображения (4) определяются как собственные значения характеристического уравнения: detAm m E 0. (26) Матрица линеаризации Am является m-периодичной и для нее справедливо следующее равенство: Am A(m) A(m 1)... A(2) A(1). (27) Условие устойчивости m-цикла: km 1. (28) В случае одномерного отображения xn m f ( xn ), G( m , xn ) f ( m ) ( xn ) (29) матрица линеаризации Am для m-кратной неподвижной точки отображения или цикла периода m имеет вид: m d (m) Am f ( x ) f ( f ( i ) ( x )). dx i 0 (30) Здесь f (0)(x) = x. В случае, когда производная m раз примененной функции вычисляется для одной из точек x*i цикла периода m, получим m d (m) f (x) f ( f ( x j )). dx j 0 x x*i (31) Это означает, что производная m раз примененного отображения в точке цикла – это произведение производных исходного отображения по всем точкам цикла. Таким образом, условие устойчивости цикла периода m одномерного отображения определяется неравенством: m | f ( xi* ) | | f ( x1* ) f ( x2* )... f ( xm* ) | 1. i 1 (32) Сверхустойчивый цикл Из соотношения (32) видно, что устойчивость цикла в целом определяется совокупными свойствами всех его точек. При итерации на одних из них начальное отклонение может локально нарастать, тогда как на других – уменьшаться. Однако имеется особый случай, когда свойства одной точки определяют устойчивость цикла в целом, а именно, если для одной из точек x*i цикла выполняется условие f ( xi* ) 0 , то, очевидно, автоматически равно нулю и произведение производных по всем точкам. Это означает, что малое начальное отклонение от такого цикла полностью затухнет не более чем за m итераций, что и определяет название такого цикла. Поскольку с точки зрения геометрии функции последования f (xn) данное условие означает наличие экстремума (минимум, максимум, либо точка перегиба), то можно сказать, что сверхустойчивый цикл содержит хотя бы одну критическую точку функции последования. Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом: xn1 xn ( 1 xn ), (33) где – управляющий параметр, а xn принадлежит интервалу [0, 1]. Данное отображение было введено еще в 1845 г. П. Ферхюльстом для описания динамики популяций в замкнутой среде. Относительная численность особей xn+1 в (n + 1)-й год пропорциональная численности особей в предыдущий год (xn принимает значения от 0 до 1 и отражает численность популяции в n-м году), а также свободной части жизненного пространства, которая xn1 xn ( 1 xn (1 ). - xn) , т.е. пропорциональна Положительный параметр характеризует скорость роста популяции. Другой пример дает задача о банковских сбережениях при стабилизирующимся росте /4 процента. Как было установлено, в * x частности, М. Фейгенбаумом, при варьировании параметра данное отображение демонстрирует довольно сложное поведение, которое становится хаотическим при больших . По мере увеличения параметра крутизна параболы плавно растет и вместе с этим будет меняться и устойчивый режим отображения. Найдем неподвижные точки логистического отображения и исследуем их устойчивость. Неподвижная точка периода 1 определяется условием x* ( 1 x* ) x* . Получаем две неподвижные точки: x* 0, x* 1 1 . Значение мультипликатора неподвижных точек находим из решения характеристического уравнения (для одномерного случая f (x*) - = 0): 2x* 0. Получаем ( 1 2 x* ). 1) Неподвижная точка x* = 0. Ее мультипликатор = . Данная точка является устойчивой при < 1 и становится неустойчивой при 1 < < 3. x* 2) Неподвижная точка x* = 1- 1/ . Ее мультипликатор = 2 - . Условие устойчивости для данной неподвижной точки: || = |2 – | < 1. Следовательно, точка устойчива при 1 < < 3 и теряет свою устойчивость при µ > 3. x* 3) При µ = 3 точка x* становится неустойчивой и в системе рождаются две устойчивые точки x*1 и x*2. Для исходного отображения (33) они образуют цикл периода 2. Эти точки удовлетворяют соотношениям: следующим x2* x1* (1 x1* ), x1* x2* (1 x2* ), что дает x1*, 2 (1 2 2 3) / 2. x1* x2* Условие устойчивости цикла периода 2 определяется с помощью неравенства (32). Вычислим сначала производные функции последования в точках x*1 и x*2 f ( x2* ) (1 2 x2* ), f ( x1* ) (1 2 x1* ). Согласно (32) условие устойчивости для цикла периода 2 есть f ( x1* ) f ( x2* 2 (1 2 x1* )(1 2 x2* ) 1. Подставляя в данное неравенство значения неподвижных точек, получим: 3.0 1 6 3.44949... Таким образом, цикл периода 2 отображения (33) будет устойчив в данном диапазоне значений параметра µ. При µ = 3.44949… 2-цикл потеряет свою устойчивость и в системе родится цикл периода 4.