Теория и расчет гиростабилизаторов
реклама

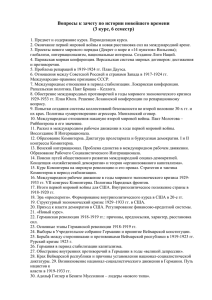
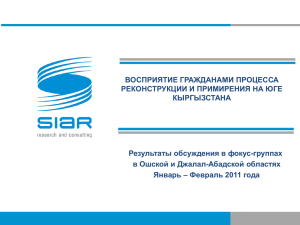
Южно-Уральский государственный университет Кафедра «Приборостроение» Теория, расчёт и проектирование гироскопических стабилизаторов Лекции © Лысов А. Н., 2005 © Лысова А. А., 2005 Структура дисциплины Осенний семестр Лекции 36 ч. Лабораторные работы 36 ч. Курсовая работа Экзамен Весенний семестр Лекции 30 ч. Лабораторные работы 30 ч. Курсовой проект Экзамен, зачёт Литература Основная литература: • Пельпор Д.С. Гироскопические системы. Теория гироскопов и гиростабилизаторов: Учебник для вузов. - 2-е издание. - М.: Высшая школа, 1986. • Лысов А.Н. Одноосные гироскопические стабилизаторы. Челябинск: ЧПИ, 1977. • Лысов А.Н. Двухосные и трехосные гироскопические стабилизаторы. - Челябинск ЧПИ, 1978. • Пельпор Д.С., Колосов Ю.А., Рахтеенко Б.Р. Расчет и проектирование гироскопических стабилизаторов. - М.: Машиностроение, 1972. • Гироскопические системы. Проектирование гироскопических систем. Ч.2. Гироскопические стабилизаторы./ Под ред. Д.С. Пельпора. М.: Высшая школа, 1977. Дополнительная литература: • Виниченко Н.Т., Лысов А.Н. Силовые гировертикали: Учебное пособие./Под ред. А.Н. Лысова. - Челябинск: ЧПИ, 1985. • Индикаторные гироскопические платформы. /Под ред. А.Д. Александрова. - М.: Машиностроение, 1979. • Репников А.В., Сачков Г.П„ Черноморский А.И. Гироскопические системы: Учебное пособие для авиационных вызов./ Под ред. А.В. Репникова. - М.: Машиностроение, 1983 . • Фабрикант Е.А., Журавлев Л.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984 . Одноосные гироскопические стабилизаторы A h H К M1 B H M 2 Содержание • • • • • • • • • • • • • • • • Лекция 1. Одноосный силовой ГС. Лекция 2. Принцип действия одноосного силового ГС. Лекция 3. Вывод уравнения движения ГС на неподвижном основании. Лекция 4. Обеспечение устойчивости гиростабилизатора за счет увеличения демпфирования по оси стабилизации. Лекция 5. Гиростабилизатор на «малых» гироскопах. Лекция 6, 7. Обеспечение устойчивости гиростабилизатора с помощью корректирующих контуров. Лекция 8, 9. Движение одноосного силового гиростабилизатора на подвижном основании. Лекция 10. Компенсация влияния углового движения основания. Лекция 11. Одноосный индикаторно-силовой гиростабилизатор. Лекция 12. Одноосный гиростабилизатор, построенный на базе датчика угловой скорости. Лекция 13. Одноосный гиростабилизатор с форсирующим гироскопом. Лекция 14. Одноосный индикаторный гиростабилизатор. Лекция 15. Системы ориентирования гиростабилизатора. Лекция 16. Влияние конечной жесткости элементов конструкции на динамику ГС Лекция 17. Учёт конечной жёсткости редуктора. Лекция 18. Лекция 1. Введение Развитие современной авиационной и ракетной техники характеризуется значительным ростом скорости, высоты полета и маневренности летательных аппаратов. Основные задачи по управлению летательным аппаратом решаются с помощью гироскопических приборов и систем, точность работы которых определяет эффективность действия самолетов, ракет и космических кораблей. Введение Кроме того, на гироскопические системы возлагаются сложные задачи по стабилизации и управлению целым рядом специальных бортовых систем (антенны бортовых радиолокационных станций, чувствительные элементы головок самонаведения ракетных снарядов, авиационные прицелы, аэрофотоаппараты и др.). Гироскопический стабилизатор линии визирования лазерного пеленгатора-дальномера "Луч" Гиростабилизированный антенный пост Введение Бортовые системы, подлежащие стабилизации на заданном направлении в пространстве, обладают большим весом и моментом инерции; при этом в условиях интенсивных колебаний летательного аппарата гироскопическая стабилизация испытывает значительные динамические нагрузки. Требования высокой точности стабилизации бортовых систем на заданном направлении в пространстве и тяжелые условия их эксплуатации привели к созданию гироскопических стабилизаторов. Введение Инерциальные системы управления подвижными объектами (ракетами, самолетами, подводными лодками, космическими аппаратами и т.п.) требуют стабилизации положения чувствительных элементов (ньютонометров) в пространстве с высокой точностью. В системах управления баллистическими ракетами ньютонометры обычно стабилизируют относительно неподвижной в пространстве (инерциальной) системы координат, в системах управления другими подвижными объектами, как правило, - относительно некоторой вращающейся, например земной, системы координат. В любом случае стабилизация сводится к определению параметров углового положения некоторой площадки (платформы) с установленными на ней приборами и выработке соответствующих сигналов управления, обеспечивающих требуемое положение платформы в выбранной системе координат. Введение Параметры положения платформы и управляющие сигналы для ее стабилизации могут определяться и вырабатываться различными приборами: например, электромеханическими измерителями угловых ускорений и скоростей, лазерными датчиками угловых скоростей. Однако наибольшее распространение до настоящего времени для этой цели сохранили гироскопы. Платформу, предназначенную для размещения объектов стабилизации и гироскопов, обеспечивающих ее стабилизацию в совокупности с некоторыми элементами автоматики, принято называть гироскопическим стабилизатором или гиростабилизатором (ГС). Введение Наряду со стабилизацией объектов гиростабилизаторы используются и для измерения угловых отклонений объектов, на которых они установлены, от требуемого положения. Курсовертикаль Самоориентирующаяся гироскопическая система курсокреноуказания Введение Классификация гироскопических стабилизаторов По количеству стабилизированных осей Одноосные Двухосные ГС ГС Трёхосные ГС По принципу действия Индикаторносиловые Индикаторные Силовые Непосредственные Поплавковый Двухстепенный интегрирующий гироскоп гироскоп Динамически Датчик настраиваемый угловой скорости гироскоп Форсирующий гироскоп Трёхстепенный гироскоп Гиродин Чувствительные элементы Введение Гироскопические стабилизаторы По количеству стабилизированных осей Одноосные Двухосные ГС ГС Трёхосные ГС По принципу действия Индикаторносиловые Индикаторные Силовые Непосредственные Поплавковый Двухстепенный интегрирующий гироскоп гироскоп Динамически Датчик настраиваемый угловой скорости гироскоп Форсирующий гироскоп Трёхстепенный гироскоп Гиродин Чувствительные элементы Одноосный силовой гиростабилизатор Гироскопические стабилизаторы По количеству стабилизированных осей Одноосные Двухосные ГС ГС Трёхосные ГС По принципу действия Индикаторносиловые Индикаторные Силовые Непосредственные Поплавковый Двухстепенный интегрирующий гироскоп гироскоп Динамически Датчик настраиваемый угловой скорости гироскоп Форсирующий гироскоп Трёхстепенный гироскоп Гиродин Чувствительные элементы Принцип действия одноосного силового ГС Применение силовых гиростабилизаторов в различных гироскопических системах наметилось у нас в конце 30-х годов, но основные принципы и схемы силовой стабилизации были разработаны в 1924 г. С.А. Ноздровским (Гироскоп с искусственными прецессиями. Патент на изобретение. №2168, класс 42с, гр. 25/50, заявлен 2 авг. 1924 г.) Позднее появились аналогичные схемы за границей. Принцип действия одноосного силового ГС Кинематическая схема одноосного силового ГС: датчик моментов платформа двухстепенный гироскоп датчик команд гироблок объект стабилизации H датчик углов прецессии редуктор двигатель стабилизации Гироскоп располагают на платформе так, чтобы в невозмущенном положении ось чувствительности была параллельна оси стабилизации. Гироскоп вместе с датчиками углов и моментов, токоподводами, устройствами для балансировки и другими элементами выполняются, как правило, в виде отдельного прибора, называемого гироблоком. При этом роторы датчиков углов и моментов устанавливаются на цапфах оси подвеса гироскопа, а их статоры закрепляются в корпусе гироблока. Принцип действия одноосного силового ГС ось прецессии H ось стабилизации Условимся называть ось подвеса гироблока осью прецессии, ось подвеса платформы – осью стабилизации. Принцип действия одноосного силового ГС H усилитель стабилизации Сигнал с датчика угла гироблока, пропорциональный углу поворота гироскопа вокруг оси прецессии, подается на вход усилителя стабилизации, с выхода которого поступает на управляющую обмотку двигателя стабилизации. Управление двигателя таково, что его действие на платформу обусловливает движение гироскопа в сторону уменьшения угла прецессии. Совокупность гироскопа, датчика угла, усилителя стабилизации и двигателя стабилизации с редуктором называют системой стабилизации, а цепь датчик угла – усилитель – двигатель стабилизация с редуктором – цепью стабилизации. Принцип действия одноосного силового ГС Рассмотрим принцип действия гиростабилизатора. z Мг Первый этап стабилизации. M1 . H М Г H . y x H М1 M M1 M Г 0. Принцип действия одноосного силового ГС z Мг Второй этап стабилизации. M1 . H cos M Г H cos . y x MC K . М1 H МС По мере прецессии гироскопа он поворачивается на угол и с датчика угла начинает сниматься сигнал, который после усиления в усилителе стабилизации поступает на двигатель стабилизации. Последний прикладывает к платформе момент, направленный противоположно внешнему. M M1 M Г М С 0. Принцип действия одноосного силового ГС z Мг Третий этап стабилизации. MC K M Г H cos y x М1 H МС При дальнейшем увеличении угла прецессии момент двигателя стабилизации возрастает до величины внешнего момента. При этом прецессия гироскопа прекратится, Принцип действия одноосного силового ГС z Третий этап стабилизации. M C K ст . Мг М1 ст . K y М1 ст H стx МС а воздействие на платформу целиком уравновесится двигателем стабилизации M M1 M C 0. где i К кду к у кдС i, - передаточное отношение редуктора; к ду , к у , к дс - коэффициенты передачи датчика угла, усилителя и двигателя стабилизации, соответственно. Принцип действия одноосного силового ГС Так как в рамках прецессионного объяснения гироскоп безинерционен, то можно считать, что равенства M M1 M Г 0; M M1 M Г М С 0 : M M 1 M C 0 достигаются мгновенно и платформа не успевает отклониться от первоначального положения. Принцип действия одноосного силового ГС 50 М М1 40 30 20 МГ 10 0 -10 0 0,05 0,1 0,15 0,2 0,25 -20 0,3 t МС -30 -40 -50 1 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 t 0 0 0,2 0,05 0,1 0,15 0,2 0,25 0,3 0,05 0,1 0,15 0,2 0,25 0,3 0,15 0,1 0,05 0 0 -0,05 -0,1 t С учетом инерционных свойств гиростабилизатора переходные процессы будут иметь следующий вид. Принцип действия одноосного силового ГС М М1 Гироскоп МС Стабилизированная платформа МГ Кинетический момент Р ДС УС ДУ M M1 M Г 0. M M1 M C M Г 0. Принцип действия одноосного силового ГС М М1 Гироскоп МС Стабилизированная платформа МГ Кинетический момент Р ДС УС ДУ Принцип действия одноосного силового ГС М М1 Гироскоп МС Стабилизированная платформа МГ Кинетический момент Р ДС УС ДУ M M1 M c 0. Вывод уравнения движения ГС на неподвижном основании Введем следующие прямоугольные системы координат: Z п ,Z ζ О ξ xп x - система координат, связанная с основанием; x n y n z n - система координат, связанная с платформой; xyz - система координат, связанная с гироскопом. y ,уп Вывод уравнения движения ГС на неподвижном основании Обозначим: - угол поворота стабилизированной платформы относительно основания; - угол прецессии; M 1 , M 2 - возмущающие моменты относительно осей стабилизации и прецессии; A - суммарный момент инерции стабилизированной платформы, гироблока и ротора двигателя стабилизации приведенного к оси стабилизации относительно оси y n; B - момент инерции гироскопа относительно оси прецессии; H К - кинетический момент гироскопа; h - коэффициент усиления цепи стабилизации; - коэффициент демпфирования относительно оси стабилизации. Вывод уравнения движения ГС на неподвижном основании М hдс . М ( 0) hдс . М хх hдс nxx hдс Jp Tэмех . n - коэффициент противоэдс двигателя, Тэмех – электромеханическая постоянная времени двигателя. h hдс i 2 - коэффициент противоэдс двигателя стабилизации, приведенный к оси стабилизации (коэффициент демпфирования по оси стабилизации, обусловленный коэффициентом противоэдс двигателя). Вывод уравнения движения ГС на неподвижном основании Уравнения движения одноосного силового неподвижном основании: z гиростабилизатора на A H h M2 H К M1 Н уп B mom П y 0 A H h К mom M1 0 Z 0 B H M 2 0 A h H K M1 B H M 2 Структурные схемы гиростабилизатора и его передаточные функции Применим к уравнениям преобразование по Лапласу, тогда, полагая начальные условия нулевыми, получим: A p 2 ( p) h p ( p) H p ( p) K ( p) M1 ( p); B p 2 ( p) H p ( p) M 2 ( p). В связи с тем, что гиростабилизатор представляет систему автоматического регулирования, в которой объектом регулирования является механическая часть (платформа с гироскопом и объект стабилизации), а регулятором – цепь стабилизации, составим его структурную схему. Разрешим первое уравнение относительно (p), а второе относительно (p): 1 ( p) M1 ( p ) h p ( p ) H p ( p) K ( p ); 2 A p 1 ( p) M 2 ( p) H p ( p). 2 B p Структурные схемы гиростабилизатора и его передаточные функции Далее каждое уравнение можно изобразить в виде некоторой блок-схемы; совокупность их представляет структурную схему гиростабилизатора. М1(p) hp М2(p 1 (p) Ap 2 ) Hp Hp K 1 Bp 2 (p) Структурные схемы гиростабилизатора и его передаточные функции Для определения передаточных функций гиростабилизатора преобразуем его структурную схему с помощью правил, известных из теории автоматического регулирования. М1 (р) 1 Ap 2 hp H2 B HK Bp W , M ( p) 1 1 A p2 h p 1+ H 2 HK 1 2 Ap hp B Bp Bp . 3 2 2 ABp Bhp H p HK (р) Структурные схемы гиростабилизатора и его передаточные функции Перейдем к определению передаточной функции W,M2(p) гиростабилизатора. Для этого структурную схему представим в виде: М2 (p) Hp K 1 Ap 2 hp Bp 2 (p) H ( Hp K ) Bp W , M ( p) 2 Hp K Bp 2 W ,M ( p) 1 Hp K . 3 2 2 p ABp Bhp H p HK Структурные схемы гиростабилизатора и его передаточные функции Изобразим преобразованную структурную схему передаточной функции W,M1 (p) гиростабилизатора. М1 (р) W , M 1 H Bp W,M1 (p) для определения (р) H H . W , M ( p) ( p) 3 2 2 ABp Bhp H p HK Bp 1 Из передаточных функций следует, что при постоянном возмущающем моменте М1 статическая ошибка по координате отсутствует, т.е. ст=0, а угол поворота гироузла определяется из выражения М1 ст . К При постоянном или медленно меняющемся возмущающем моменте М имеем 2 М2 др . H