МедТех Лекция3
реклама

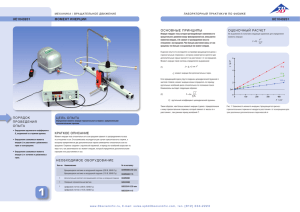
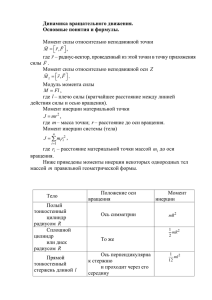
Кафедра медицинской и биологической физики Тема лекции: Механические свойства твердых тел и тканей организма. Вращательное движение. Бормашина. Лекция №2 для студентов 1 курса, обучающихся по специальности Стоматология Лектор: Рузанова Л.Н. Красноярск 2015 План лекции • 1. Виды деформаций, механические свойства биологических тканей. • 2. Основные понятия и законы вращательного движения. • 3. Бормашина. Механическое воздействие на тело. • Механическое воздействие на тело изменяет взаимное расположение его частиц. • Деформация – изменение взаимного расположения частиц тела, приводящее к изменению формы и размеров тела. Под действием внешних сил расстояние между частицами тела меняется. Это приводит к возникновению внутренних сил, стремящихся вернуть атомы в исходное положение. Мерой этих сил является механическое напряжение. Закон Гука. • Напряжение равно отношению модулю силы, возникающей в данном сечении в результате деформации, к площади сечения. F S • Относительная деформация – отношение абсолютной деформации к длине тела. • L L Относительная деформация прямо пропорциональна напряжению. E – модуль Юнга E Виды деформации • Растяжение (сжатие) • Сдвиг • Всестороннее сжатие • Изгиб • Кручение Зависимость напряжения от величины деформации. Закон Гука справедлив для участка ОВ, это упругая деформация, на участке ВМ – пластическая деформация, МN – текучая деформация, NC – деформация перед разрушением. С – предел прочности. Разрушение. • Предел прочности – максимальное напряжение при котором тело еще не разрушается. • Разрушение – макроскопическое нарушение сплошности материала в результате механических или каких-либо иных воздействий. Виды разрушений: 1. Пластическое (вязкое) разрушение 2. Хрупкое разрушение Механические свойства биологических тканей • Большинство биологических тканей являются композиционными материалами, образованными объемным сочетанием химически разнородных элементов. • Состав каждого типа ткани зависит от функций, которые она выполняет. • К примеру, в состав костной ткани входит минеральное вещество – гидроксилапатит, другая часть объема состоит из эластичного материала, главным образом коллагена. Механические свойства костной ткани • Плотность костной ткани – 2400кг / м 3 • Модуль Юнга – 1010 Па • Предел прочности – 100МПа • Относительная деформация – 1% Динамика вращательного движения твердого тела • Твердое тело – тело, которое ни при каких условиях не может деформироваться, т.е. расстояние между двумя любыми точками этого тела остается постоянным. Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Величины, характеризующие вращательное движение: Кинематические: угол поворота – угловая скорость – угловое ускорение – частота вращения – период вращения – d dt d dt T 1 Величины, характеризующие вращательное движение: • Динамические: • момент инерции – • момент силы – • момент импульса – J M L Моментом инерции материальной точки относительно некоторой оси называется скалярная физическая величина равная произведению массы материальной точки на квадрат расстояния до оси вращения. I mr 2 J кг м r m 2 Момент инерции твердого тела Момент инерции системы материальных точек (тела) относительно данной оси – это величина, равная сумме произведений масс этих точек на квадраты их расстояний до данной оси. I mi ri 2 i В том случае, если масса тела распределена непрерывно (тело нельзя представить в виде совокупности материальных точек) момент инерции тела равен: I r dm 2 V Момент инерции твердого тела Момент инерции характеризует инерциальные свойства тела при вращательном движении, т.е. показывает как тело при вращательном движении сопротивляется попыткам изменить скорость его вращения. Момент инерции во вращательном движении играет ту же роль что и масса при поступательном движении. Момент инерции зависит от: А) массы тела Б) формы тела В) положения оси вращения Момент инерции сплошного цилиндра Разобьем цилиндр на отдельные полые концентрические цилиндры бесконечно малой ширины dr и радиусом r. Момент инерции такого цилиндра равен: dI r dm 2 dm — масса элементарного цилиндра Выразим массу через плотность dm = ρdV = ρ dS h Площадь основания полого цилиндра равна dS 2 r dr Подставим это выражение в массу dm 2 h rdr И возьмем определенный интеграл: R I 2 r dm 0 R 3 2 h r dr 0 Момент инерции сплошного цилиндра R 4 R r I 2 h r dr 2 h 4 0 3 1 2 I C mR 2 0 hR 2 4 Моменты инерции некоторых тел Теорема Штейнера Момент инерции тела относительно произвольной оси вращения равен сумме момента инерции тела относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы на квадрат расстояния между осями. JZ J X m d 2 Применение теоремы Штейнера Момент инерции стержня относительно оси, проходящей через его центр масс: 1 IC m 12 2 Найдем момент инерции стержня относительно оси, проходящей через его конец: a 2 2 2 2 2 ml ml 4 ml ml I I C ma 2 12 4 12 3 1 I m 3 2 Момент силы относительно точки О: Моментом силы относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора, проведенного из точки О в точку приложения силы, на силу. M r, F Модуль момента силы Плечо силы M Fr sin l r sin M F l Направление вектора момента силы определяется по правилу правого винта: Направление вектора момента силы совпадает с поступательным движением кончика винта при вращении винта от r к F . Вектор момента силы перпендикулярен и силе, и радиус-вектору. M F, M r Момент силы характеризует способность силы вызывать поворот вокруг точки – т.е. силовое воздействие при вращательном движении. Моментом импульса материальной точки относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора, проведенного из точки О к материальной точке, на импульс материальной точки. L r , p r , mv L p r sin pl Направление вектора L также определяется по правилу правого винта. Момент импульса материальной точки относительно оси вращения есть проекция вектора момента импульса L относительно произвольной точки оси, на эту ось. Lz p R Пусть материальная точка движется по окружности. Выберем точку О в центре окружности. L О v r L p r mvr 2 L mr I mr 2 r L I p Момент импульса равен произведению момента инерции на угловую скорость. Работа при вращательном движении Элементарная работа по определению равна: dA F ds Перемещение: ds rd dA F rd dA M z d Работа, совершаемая при повороте на угол A (2 1 ) : 2 M d z 1 Если Mz = const., то A M z Кинетическая энергия вращающегося тела Для каждой точки тела: dm 2 dWk v 2 dm r 2 2 dWk Для всего тела: Wk dWk 2 2 2 r dm 2 I Wk 2 2 Основной закон динамики вращательного движения Сила F , совершая работу dA = Mzdφ, увеличивает кинетическую энергию вращающегося тела на M z d dWk I dWk d ( ) I d 2 d d d Mz I I dt dt dt 2 M z I dWk : Основной закон динамики вращательного движения Угловое ускорение, приобретаемое телом, прямо пропорционально результирующему моменту сил, действующих на тело, и обратно пропорционально моменту инерции тела относительно его оси вращения. M I Основной закон динамики вращательного движения есть аналог второго закона Ньютона: F a m Закон сохранения момента импульса Рассмотрим замкнутую систему тел. Сумма моментов внешних сил равна нулю. f 21 p2 1 2 Моменты сил, действующих на тела: p1 f 12 M12 dL1 dL2 , M 21 dt dt L L1 L2 – момент импульса системы тел dL d ( L1 L2 ) M12 M 21 0 dt dt Закон сохранения момента импульса: Момент импульса замкнутой системы сохраняется. L const. Бормашина Бормашина — ротационный инструмент, развивающий высокую частоту вращения шпинделя (до 400 000 об/мин) при небольшом крутящем моменте. Бормашины нашли широкое применение в стоматологии (в составе стоматологических установок). Бормашина • Бор — рабочий инструмент, служащий для удаления ткани резанием. Виды бормашин. • Пневматические бормашины, работающие от сжатого от сжатого воздуха, поступающего по шлангу от компрессора. Достоинство — возможность очень точной обработки за счет большой скорости вращения инструмента. Недостаток — малый крутящий момент, что делает затруднённой, а иногда невозможной обработку некоторых тканей и пломбировочных материалов. Виды бормашин. • Электромеханическая бормашина — микромотор. • Обладает большим крутящим моментом, но меньшей скоростью вращения. • Применяется для «черновой» обработки, а также для подгонки коронок, протезов, и для лечения крайних дальних зубов. Виды бормашин. • Электромеханическая бормашина с многозвенной ременной передачей. • Низкая скорость вращения, высокий уровень шума. Часто — большой уровень вибраций. • Данный тип бормашины широко распространялся в советской стоматологии. В середине 2000-х годов бормашины данного типа повсеместно прекратили своё существование и встречаются в рабочем состоянии крайне редко. • Нами рассмотрены: – механические свойства тел и тканей – вращательное движение – физические принципы работы бормашины Спасибо за внимание! РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА Обязательная: • Ремизов А.Н. Медицинская и биологическая физика: учебник. -М.: Дрофа, 2007.Дополнительная: • Федорова В.Н. Краткий курс медицинской и биологической физики с элементами реабилитологии: учебное пособие. -М.: Физматлит, 2005.• Антонов В.Ф. Физика и биофизика. Курс лекций: учебное пособие.-М.: ГЭОТАРМедиа, 2006.• Самойлов В.О. Медицинская биофизика: учебник. -СПб.: Спецлит, 2004.Электронные ресурсы: • ЭБС КрасГМУ • Ресурсы интернет • Электронная медицинская библиотека. Т.4. Физика и биофизика.- М.: Русский врач, 2004.