Применение робота
реклама

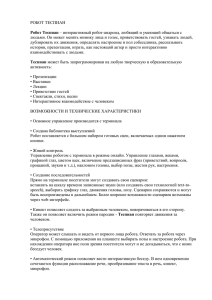
Самоходный робототехнический аппарат «ПАУК». Автор: Яцык Андрей Мирославович, лицей №1524, 11 класс Научный Руководитель: Доцент, к.т.н., Лукин Борис Сергеевич преподаватель ИВТ, лицей №1524 Цель Исследование и сборка РТС «Робот ПАУК» Решаемые задачи Обзор существующих шагающих устройств Сборка и настройка Схемотехнический анализ Исследования устройства Введение Создание промышленных роботовманипуляторов, способных заменить человека на многих участках современного производства, а также автоматических систем, которые могут быть использованы в условиях, опасных для человека, является актуальной научной и технической проблемой. Одним из важных классов роботов являются шагающие роботы, предназначенные для перемещения по труднопроходимой местности. Преимущества шагающих роботов Высокая проходимость Практически не повреждают почвенный покров Различные сферы применения Принцип движения робота Своей кинематикой робот напоминает паука, поэтому и был так назван. Ведь известно, что природа создает самые совершенные организмы. Опорнодвигательная система насекомых хорошо изучена, и на ее основе создаются схемы движения роботов. Мобильность пауков значительно выше, чем у созданных человеком транспортных средств. Роботы, прототипом которых являются насекомые, весьма распространены. В исследовательской лаборатории Case Western Reserve University, занимающейся созданием биоморфных роботов, создан робот-муравей BILL-Ant (Biologically-Inspired Legged Locomotion Ant). Подобно реальному муравью, робот движется, как насекомое. Его ноги имеют 18 степеней свободы, и управляются 18 сервомоторами. Схемотехнический анализ В состав схемы входят фототранзистор, светодиод и микросхема LM324N. Они отвечают за преодоление роботом препятствий. 2 левых операционных усилителя служат для усиления и фильтрации сигнала, а правые 2 обеспечивают механизм переключения двигателей для отъезда и разворота. Движение робота Конструкция РТС позволяет ей передвигаться, обходя препятствия. При обнаружении препятствий правый двигатель начинает вращаться в обратную сторону, а левый останавливается. Использование переменного резистора регулирует чувствительность обнаружения препятствий. Исследование работы РТС. Сразу после включения питания РТС анализирует местность и начинает движение. Анализ происходит очень быстро. Робот начинает перемещаться короткими шагами, напоминающими движения паука, по поверхности. Тест на огибание препятствий Расставив предметы на расстоянии 25 см друг от друга, исследуем поведение робота. Робот «Паук» перемещается практически не изменяя прямолинейное направление движения. Скорость оставляет желать лучшего, но ориентация в пространстве высокая. Тест на преодоление препятствий Максимальный выступ, на который вскарабкался робот, был высотой 3 см. При длине «ног» робота 8 см – весьма неплохой результат. Увеличивая робота до размеров реального лунохода (2м высотой), получим примерно 0.75м, что практически недостижимо для колесного лунохода. При этом робот «Паук» демонстрирует хорошую устойчивость. Применение робота-паука Робот-паук может применяться во всевозможных областях науки. Потребность в мобильных роботах, способных выполнять различные задачи возрастает (например обслуживание ядерных реакторов или тушение пожаров). Примером может служить разработка NASA. Этот робот будет исследовать поверхность других планет или небольших небесных тел. Применение программируемых микросхем Применение программируемой микросхемы и специализированного ПО помогут задать роботу определенное направление. В качестве процессора можно использовать микросхемы серии ATTINY, программируемые с помощью AVR. Заключение В ходе научной работы был создан самоходный кибернетический аппарат Робот «ПАУК». Он может передвигаться, огибая препятствия. РТС знакомит нас с основами кибернетических устройств, шагающих роботов. Последующая модернизация может задать движению робота определенную траекторию.