ОПТИМИЗАЦИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
реклама

ОПТИМИЗАЦИЯ
НЕСТАЦИОНАРНЫХ ЗАДАЧ
КОМБИНАТОРНОГО ТИПА С
ПОМОЩЬЮ ГЕНЕТИЧЕСКИХ
АЛГОРИТМОВ
Д.И.Батищев, Е.А.Неймарк,
Н.В. Старостин
2006,ННГУ
Задача нестационарной
дискретной оптимизации
(x*, t) min (x i , t),
xi
i
x G , 0 | G | N , где
t [0, T ], T
i
i i
i
x ( x1x 2 ... x n ),
G ( x1 , x 2 ,... x N )
| G | мощность множества G
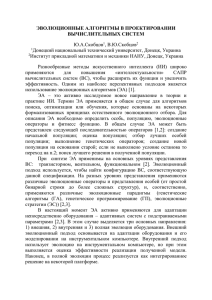
Вид целевой функции
F1 ( x ), t 0, ,
F ( x), t , 2 ,
2
( x, t )
......
FN ( x ), t T , T
F1 ( x ), t 0, ,
( x, t )
F2 ( x ), t , 2
F(x,t)
F1*
F2*
a
T = 2
x1*
x2*
x
b
S
S1*
S2*
t
Стационарная задача об
одномерном ранце
N
Q( x) xi vi max
i 1
N
, где
xi wi Wmax
i 1
xi 0,1, i 1,2...N
vi ценность предмета
wi вес предмета
Wmax основное весовое ограничение
1, предмет кладется в ранец
xi
0, предмет не кладется в ранец
Нестационарная задача об
одномерном ранце
N
Q ( x, t ) xi vi (t ) max
i 1
N
xi wi (t ) Wmax (t )
i 1
xi 0,1, i 1,2...N
Стационарная задача
коммивояжера
Q( x) c x min
N
N
ij ij
i 1 j 1
N
xij 1, j 1, N
i 1
N
xij 1, i 1, N
j 1
x {0,1}
ij
, где
cij стоимость перехода из i в j
1, в цикле есть переход из i в j
xij
0, перехода из i в j нет
Нестационарная задача
коммивояжера
N
N
Q ( x, t ) cij (t ) xij min
i 1 j 1
N
xij 1, j 1, N
i 1
N
xij 1, i 1, N
j 1
x {0,1}
ij
Методы решения
нестационарных задач
• методы увеличения генетического
разнообразия при изменении среды [2,10],
• методы постоянного поддержания
генетического разнообразия [4,5],
• методы, использующие дополнительную
память [3,8,9],
• методы, использующие дополнительные
популяции [1,6].
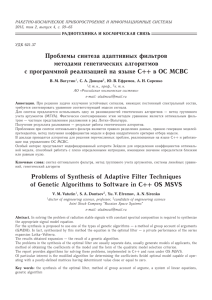
Методы, использующие
дополнительную память:
диплоидное представление
А1
B1
А2
B2
А3
.
.
.
АN
B3
.
.
.
BN
генотип
Принцип
доминирования
С1
С2
С3
.
.
Особь
.
СN
фенотип
Оценивание
(s)
приспособленность
Методы, использующие
дополнительную память:
структурное представление
Уровень
регулирующих
генов
Уровень
простых
генов
генотип
Фенотип:
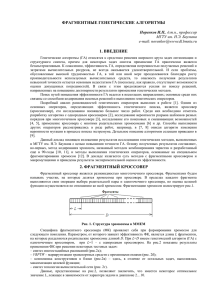
Алгоритм с памятью
Состояние среды
k:=k+1
k:=0
индикатор среды Ik
индикатор среды Ik
Формируется начальная
популяция
НЕТ
Индикатор Ik
найден в базе
ДА
Генетический поиск
Состояние среды
изменилось
НЕТ
ДА
Популяция загружается
из базы
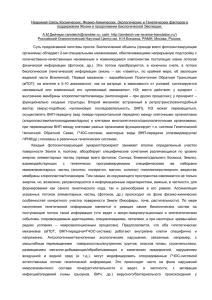
Пример решения
нестационарной задачи о ранце
100
приспособленность
90
80
70
60
50
40
30
20
T=4
10
0
1
41
81
121
161
201
241
поколение
281
321
361
401
441
Меры эффективности алгоритмов
для нестационарных задач
• Точность [11]
acc F(t,)EA
(t )
F (best EA
) Min F(t )
Max F(t ) Min F(t )
• Средняя коллективная приспособленность [7]
P
g
(
F
)
Best
M
g 1
P
m 1
P количество поколений в запуске
FC
, где
М количество запусков алгоритма
M
• Средняя скорость отклика – среднее количество
вычислений, затрачиваемое для нахождения
оптимального решения текущей задачи.
Сравнение эффективности
алгоритмов
Алгоритм
Коллективная
точность
приспособленность
Средняя
скорость
отклика
(поколений)
Алгоритм с
памятью
63.108
0.996
2.60
Структурный
алгоритм
54.291
0,835
20.44
Гаплоидный с
преобразованием
генотипа
56.829
0,901
23.16
Диплоидный
49.185
0,785
25.99
Гаплоидный со
штрафной функцией
24.896
0,329
25.53
Литература
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
J. Branke. Memory enhanced evolutionary algorithms for changing optimization problems. In
Congress on Evolutionary Computation CEC99, volume 3, pages 1875--1882. IEEE, 1999.
Cobb H. An Investigation into the Use of Hypermutation as an adaptive Operator in Genetic
Algorithm Having Continuous, Time-Dependent Nonstationary Environments. Naval Research
Laboratory Memorandum Report 6760. (1990).
Dasgupta D., McGregor D. R. Nonstationary function optimization using the Structured Genetic
Algorithm. In Proceedings of Parallel Problem Solving From Nature (PPSN-2), Brussels, 28-30
September, pages 145--154, 1992.
Ghosh, S. Tstutsui, and H. Tanaka. Function optimization in nonstationary environment using
steady state genetic algorithms with aging of individuals. In IEEE Intl. Conf. on Evolutionary
Computation, pages 666--671, 1998.
Grefenstette John J. Genetic Algorithms for changing environments. In Proceedings of Parallel
Problem Solving From Nature (PPSN-2), Brussels, 28-30 September, pages 137--144, 1992.
J. Eggermont, T. Lenaerts, S. Poyhonen and A. Termier Raising the Dead; Extending
Evolutionary Algorithms with a Case-Based Memory Proceedings of the Fourth European
Conference on Genetic Programming (EuroGP'01) LNCS 2038 , 2001.
Ronald W. Morrison. Performance Measurement in Dynamic Environments,
citeseer.ist.psu.edu/676673.html
K. P. Ng and K. C. Wong. A new diploid scheme and dominance change mechanism for nonstationary function optimization. In L. J. Eshelman, editor, Proc. 6th Int'l Conference on Genetic
Algorithms, 1995.
C. Ramsey and J. Grefenstette. Case-based initialization of genetic algorithms. In Proc. Fifth
International Conference on Genetic Algorithms, pages 84--91, 1993.
Vavak,F. , Jukes,K.A., Fogarty,T.C. Leaning the Local search range for genetic optimization in
nonstationary environments/ In IEEE Intl/ Conf/ on Evolutionary Computation ICEC’97, pp. 355360. IEEE Publishing, 1997.
Weicker, K.: Performance Measures for Dynamic Environments. In: Parallel Problem Solving
from Nature - PPSN VII, Lecture Notes in Computer Science 2349. Springer-Verlag 2002 64-73