Лекция 1. Система управления марсоходом SPIRIT
реклама

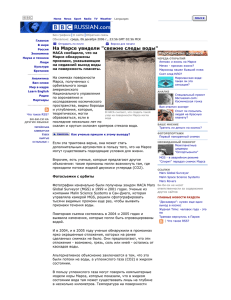
Встроенные системы управления Лекция 1 СИСТЕМА УПРАВЛЕНИЯ МАРСОХОДОМ SPIRIT-OPPORTUNITY А. Астапкович Государственный университет аэрокосмического приборостроения, СПб, 2012 The Martian Chronicles People of Earth came to Mars. They came because they were afraid or unafraid, happy or unhappy. There was a reason for each man. They were coming to find something or get something, or to dig up something or bury something. They were coming with small dreams or big dreams or none at all. Ray Bradbury, 1950 МАРИНЕР -9 Первый искусственный спутник Марса выведен на орбиту 14.11.1971, NASA За 349 дней аппарат передал на Землю 7329 изображения, покрыв около 80 % поверхности планеты. ПОСАДКА НА МАРС Марс-4", "Марс-5", "Марс-6" и "Марс-7" запущены 21 июля, 25 июля, 5 и 9 августа 1973 года Изображение поверхности, переданное Марс-5" АМЕРИКАНСКИЕ МИССИИ ПО ИССЛЕДОВАНИЮ МАРСА ПРОЕКТ Дата запуска Mars Observer 25.09.1992 Mars Global Surveyor (MGS) 07.11.1996 Mars Pathfinder (MPF) 04.12.1996 Mars Climate Orbiter (MCО) Mars Polar Lander (MPL) Deep Space 1 Основные результаты Утрачен на подлете к Марсу Аэродинамическое торможение для перехода на рабочую орбиту. Съемка и зондирование поверхности и атмосферы Марса с орбиты в течение 9 лет (1997-2006). Составил трехмерную карту рельефа планеты, обнаружил залежи гидратированных минералов и овраги, промытые водой Мягкая посадка на Марс. Съемка и исследование грунта с использованием аппаратуры посадочного аппарата и малого марсохода Sojourner 11.12.1998 Сгорел в атмосфере Марса из-за навигационной ошибки 03.01.1999 Утрачены при аварийной посадке на Марс в районе 76°ю.ш., 165°в.д. Mars Odyssey 07.04.2001 Съемка и зондирование поверхности и атмосферы Марса с орбиты до настоящего времени.' Открыл обширные зоны наличия подповерхностного льда Mars Exploration Rover-A (Spirit) 10.06.2003 Марсоходы среднего класса. Съемка и исследование фунта Марса по маршруту движения. Spirit работал с января 2004 до марта 2010 г. Opportunity работает по настоящее время Mars Exploration Rover-B (Opportunity) Mars Reconnaissanc e Orbiter (MRO) 08.07.2003 12.08.2005 Phoenix 04.08.2007 Mars Science Laboratory 26.11.2011 MAVEN 31.10.2013 Стоимость, млн. $ 980 219 266 328 3 297 830 До настоящего времени к 1 декабря 2011 г. прошел 34 км. Обнаружены минералы, образовавшиеся в водной среде, изучены слоистые отложения Высокодетальная съемка поверхности Марса с орбиты, изучение следов воды на его поверхности и выполнение атмосферной программы КА МСО Аналитическое исследование фунта в северной полярной зоне Марса в районе 68.22°с.ш. и 125.75°з.д. Обнаружил лед под слоем грунта на глубине около 5 см Исследовательский марсоход тяжелого класса - мобильная долговременная автоматическая научная лаборатория Детальное исследование эволюции атмосферы Марса, истории ее климата и возможной обитаемости 540 386 2476 655 МОБИЛЬНЫЕ РОБОТЫ ДЛЯ ПЛАНЕТАРНЫХ ИССЛЕДОВАНИЙ Предшественники SPIRIT-OPPORTUNITY НПО Лавочкина Луноход (Луна-16/17) 1970 г Вес 756 кг Длительность исследований планируемая 90 дней фактическая 301 день NASA (JPL) Марсоход Sojourner 1996 г Вес 10.5 кг Длительность исследований фактическая 90 дней Марсоход Sojourner Имел простейшую систему обхода препятствий при следовании точки А в точку B В наземный пункт передавались стереоизображения ПРОЕКТ MARS EXPLORATIONS ROVERS Целью экспедиции было обнаружение доказательств наличия воды на Марсе в его геологической истории. Марсоходы-близнецы Opportunity и Spirit были запущены к Красной планете в 2003 году в рамках миссии Mars Exploration Rovers. Основная задача была успешно выполнена – были обнаружены доказательства наличия воды. MARS EXPLORATION ROVER Планировалось, что аппараты проработают на Красной планете 9 дней, однако они продержались более пяти лет. В апреле 2009 года Spirit застрял в песке, потеряв второе из шести колес. В течение нескольких месяцев ученые пытались спасти аппарат - для этого, например, они моделировали сложившуюся ситуацию с точной копией марсохода на Земле. Ничего сделать не удалось и в начале 2010 года NASA официально объявило о прекращении попыток работы с марсоходом Spirit. В январе 2012 марсоход Opportunity встал на очередную зимнюю стоянку. Аппарат припаркован на северном склоне кратера Индевор. Место получило неофициальное название гавань Грили в честь скончавшегося в 2011 году геолога Рональда Грили, входившего в команду ученых, работающих с аппаратом. В бухте аппарат проведет несколько месяцев. Самого кратера он достиг летом 2011 года после трех лет пути. Проект Curiosity Запуск Curiosity к Марсу состоялся 26 ноября 2011 года. Прибудет на Марс 6 августа 2012. Срок службы на Марсе составит 1 марсианский год (686 земных дней). КОНЦЕПЦИЯ СИСТЕМЫ УПРАВЛЕНИЯ МАРСОХОДОВ SPIRIT-OPPORTUNITY УСЛОВИЯ РАБОТЫ МАРСОХОДОВ Расстояние между наземным пунктом управления и марсоходом варьируется от 56 до 401 млн. км. Время прохождения сигнала меняется от 3 до 22 мин. Из-за вращения Марса передача данных возможна лишь в определенных временных интервалах и требует надежного канала связи из-за помех от Солнца. РАДИАЦИОННЫЕ ПОВРЕЖДЕНИЯ Требуется обеспечить радиационную стойкость электронного оборудования , которая характеризуется: стойкостью к накопленной дозе стойкостью к разовым воздействиям ПЕРЕЛЕТ ЗЕМЛЯ-МАРС При путешествии в открытом космосе аппарат подвергается воздействию радиации и бомбардировке высокоэнергетическими частицами двух возможных типов: галактические космические лучи солнечная радиация Кроме этого оборудование подвергается интенсивному облучению при пересечении радиационных поясов Земли пересечении магнитосферы ТРЕБОВАНИЯ К МАРСОХОДУ Требовалось обеспечить возможность детального исследования геометрически сложных объектов (обломки скал). Перемещение от одной точки исследования к другой требовало перемещения по местности, на которой препятствия встречались в среднем каждые 5 метров. При этом нельзя было допустить ни переворота марсохода, ни повреждения шасси от столкновения с препятствиями. Аналогичные требования возникали при использовании манипулятора и его инструментов. КОНЦЕПТУАЛЬНЫЕ ТРЕБОВАНИЯ Система управления марсохода должна обеспечить выполнение программы исследований в автономном и полуавтономном режимах. Формулировка задачи автономного перемещения: марсоход за день должен быть способен без угрозы потери функциональности преодолеть ощутимое расстояние по местности с некоторым заданным уровнем сложности, не отклоняясь от заданного маршрута сверх установленных пределов. НАУЧНАЯ АППАРАТУРА Панорамная стереокамера Магнетометры Миниатюрная камера высокого разрешения Абразивная головка Миниатюрный термоэмиссионный спектрометр Спектрометр Мэссбауэра Рентгеноскопический спектрометр БАЗОВЫЕ ОПЕРАЦИИ С помощью научной аппаратуры следовало проводить исследования геологических обнажений в точках, который выбирались в наземном центре управления СТРУКТУРА СИСТЕМЫ УПРАВЛЕНИЯ Базовые функции системы управления Жизнеобеспечение Видеоизображения, телеметрическая и информация с приборов Наземный пункт управления Марсоход Выбор маршрута Выполнение программы исследований Высокоуровневые команды управления Передача данных Операторы планировщики заданий Научная команда КОНТУР УПРАВЛЕНИЯ Набор команд Автономные операции Канал uplink Канал downlink Текущее состояние Рекомендации Операторы (пилоты) марсохода Телеметрия Научные данные Изображения Аппаратное-программное обеспечение системы управления Система управления имеет многослойную и многокомпонентную структуру, которая включает в себя : аппаратно-программный комплекс (АПК) наземного центра АПК системы управления ретранслятора связи и посадочной ступени; АПК марсохода. Условия эксплуатации марсохода подразумевают использования бортовой аппаратуры в радиационно-стойком исполнении При этом имелся ряд существенных ограничений по массе, габаритам, энергопотреблению, температурному режиму и надежности . ЭНЕРГЕТИКА МАРСОХОДА Оценка энергетических возможностей марсохода при питании от солнечных батарей d(t) - расстояние от Солнца P - 3.85 1026 Вт поток энергии Jмарс = 600 Bт/м2 поток энергии Jземля = 1371 Bт/м2 к.п.д современных солнечных панелей 10-15 % Источником энергии для питания систем марсохода служат солнечные батареи с буферными литиевыми аккумуляторами, специальной конструкции. В результате ограничений по энергетике марсоход может перемещаться лишь по открытым пространствам. При этом утро и сумерки исключались из-за положения низкого положения Солнца над горизонтом и туманов. КИНЕМАТИЧЕСКАЯ СИСТЕМА МАРСОХОДА ТЕОРЕТИЧЕСКАЯ БАЗА Решение задачи выбора оптимального обхода маршрута обхода круглого озера, не промочив ноги Кратчайший путь состоит из дуг, которые представляют собой кратчайшие пути в пространстве A B Решение задачи выбора маршрута требует наличия карты местности Конструкция и параметры шасси Количество колес с двигателями Количество колес с возможностью поворота Диаметр колеса Максимальная скорость перемещения Максимальная высота безопасного препятствия Минимальный радиус поворота 6 4 25 см 5 см/сек 20 см 1м Конструкция шасси Конструкция шасси обеспечивает подстройку под рельеф местности НИЗКОУРОВНЕВОЕ УПРАВЛЕНИЕ Вращение на месте вправо Движение по прямой Управление перемещением вдоль выбранной траектории требует решения задачи оценки текущего состояния относительно выбранной траектории. Низкоуровневое управление перемещением подразумевает задание положений шести колес, скоростей их вращения и длительности временного интервала СИСТЕМА ЖИЗНЕОБЕСПЕЧЕНИЯ Система жизнеобеспечения Система жизнеобеспечения включает в себя систему питания и систему термостабилизации. Система питания обеспечивает энергией все подсистемы марсохода, каждая из которых представляла собой сложный комплекс. Например, электромеханическая система включала в себя : 36 коллекторных двигателя 4 шаговых двигателя 4 бесколлекторных двигателя. Подсистема термоконтроля обеспечивала сохранение работоспособности аппарата на стадии перелета, посадки на Марс и его функционирования на поверхности. Эти стадии существенно отличаются друг от друга внешними условиями. Трансформации системы Вес системы в полете составлял 1065м кг Вес марсохода 174 кг В полете терморегулирование осуществлялось бортовым компьютером ( 8 зон). На Марсе управление температурой осуществлялась в двух зонах. КЛИМАТ КОНТРОЛЬ Бортовые компьютеры сохраняют работоспособность в диапазоне температур -40 С - +40С. В течение марсианского дня максимальная температура составляла 22 С и особых проблем с обеспечение температурного режима не возникало. После захода Солнца температура опускается до -130 С, и обеспечение температурного режима оказывается критически важным. Для обеспечения комфортного температурного режима бортовой компьютер был помещен в термокожух, подогреваемый с помощью электрообогревателей, восьми радиоизотопных источников и выделяемого собственного тепла. СИСТЕМА ПИТАНИЯ Система питания включает в себя солнечные панели, Li-Ion буферный аккумулятор и автономную систему управления. Аккумулятор был специально разработан для этого проекта и обеспечивал возможность работы при пониженных температурах. Состоит из двух параллельных секций, каждая из которых состояла из восьми ячеек. Аккумулятор для обеспечения 30В питания с мощностью 16 А*ч (480 Вт), разрабатывался под обеспечение 500 циклов перезарядки. БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ БАЗОВЫЕ ФУНКЦИИ Система управления должна обеспечить функционирование системы жизнеобеспечения, что являлось как необходимым условием возможности выполнения научной программы исследований; Для выполнения научной программы требовалось обеспечить: • решение комплекса задач безопасного перемещения марсохода в автономном режиме; • управление манипулятором для установки сенсорных элементов измерительной аппаратуры в заданные положения; • управление приборами полезной нагрузки и сбор получаемых данных; • передачу данных и прием команд с центра управления. СТРУКТУРА СИСТЕМЫ УПРАВЛЕНИЯ Электромех. Связная АППАРАТУРА АППАРАТУРА VMEbus RAD6000 Интерфейс VMEbus СОЛНЕЧНЫЕ ПАНЕЛИ И Память видеобуфера Память видеобуфера НАУЧНАЯ АППАРАТУРА БУФЕРНЫЙ АККУМУЛЯТОР Мультиплексор буфер Мультиплексор буфер СИСТЕМА УПРАВЛЕНИЯ ПИТАНИЕМ Левые камеры с последовательным интерфейсом Правые камеры с последовательным интерфейсом Имелся целый ряд жестких ограничений по массе, габаритам, энергопотреблению и надежности СИСТЕМНАЯ ШИНА Система управление моторами, связной аппаратурой, видеокамерами и научными приборами была реализовано с использованием стандарта VME bus. Для ряда устройств платы сопряжения имели последовательные интерфейсы и контроллер шины VME bus, реализованный на FPGA. Последовательные интерфейсы использовались как для связи с бортовым компьютером, так и для связи плат расширения между собой. ОДНОПЛАТНЫЙ КОМПЬЮТЕР RAD6000 НОВОЕ ПОКОЛЕНИЕ RAD6000 Одноплатный 25 MIPS компьютер на процессоре RAD6000 в радиационно – стойком исполнении реализован в стандарте COMPACT PCI версия 2.0. Содержит чип контроля c возможностями коррекции ошибок для SRAM памяти , 4 Мбайт локального EEPROM и 512 Кбайт загрузочной памяти. Интерфейсы выполнены в стандарте MIL-STD-1553B ( трансформаторные развязки). Имеет конфигурируемый FPGA модуль для настраиваемых пользовательских интерфейсов. ФУНКЦИОНАЛЬНАЯ БЛОК-СХЕМА Производитель BAE SYSTEMS (ISO 9001, AS9000, ISO 14001) www.rad750.com Спецификация базовых параметров RAD6000 Среднее время наработки на отказ 375 тысяч часов Рабочая температура в крейте -30С - +65 Потребление < 7.5 Вт ( 3.3 В -5 В ) Форм-фактор CompactPCI 6U 233мм * 160 мм Вес 849 грамм Поставляется с загрузочной ROM и VxWorks Board Support Package в полетной конфигурации в инженерной конфигурации 250A242 250A241 Бортовой компьютер марсохода Аппаратно система управления марсохода реализована на базе одноплатного компьютер с 32 битным RISC процессором RAD6000 с рабочей частотой 20 Мгц. Разработка процессора для космических применений была выполнена подразделением IBM Federal System в сотрудничестве с лабораторией Air Force Research Laboratory. Процессор разрабатывался на базе PowerPC 750. Максимальная частота процессора составляет 33 Мгц, а производительность 35 МIPS. Бортовой компьютер марсоходов имеет 128 Мбайт память DRAM, 256 Мбайт памяти флэш и 3 Мбайта EEPROM. Размеры платы компьютера составляет 15*23 см. К июню 2008 г. в использовании находилось более 200 бортовых систем космического класса, реализованных на базе этого компьютера. Компьютер появился на открытом рынке в 1996 году и стоит 200 000-300 000 $. На Марсе системы на базе этого микропроцессора до этого были использованы в проектах Mars Pathfinder, Mars Polar Lander, Mars Climate Orbiter, Phoenix Polar Lander. . СТАНДАРТ VMEbus Стандарт VMEbus представляет собой стандарт архитектуры для магистрально-модульных систем управления, разработанной около 25 лет назад. Финансирование разработки этого стандарта осуществляли MOTOROLA и SUN Microsystems. Встроенные системы на основе VMEbus выпускает около 140 компаний, и их продукты находят применение в самых различных отраслях. В число наиболее распространенных типов модулей входят процессорные платы с различными микропроцессорами (INTEL 80386,MC 68020 и др.), модули каналов аналоговых и цифровых входов/выходов, интерфейсы локальных сетей и сетей ЭВМ и многое другое. ОБМЕН ДАННЫМИ В VMEbus Арбитр шины (ARBITER) - включается в слот 1 -обеспечивает управление доступом к шине; - мониторинг текущего состояния шины ; Мастер-устройство (MASTER) -управляет обменом по шине данных; -осуществляет обмен данными (чтение-запись со слэйв – устройствами); Слэйв-устройство (SLAVE) - обеспечивает мастер-устройству возможность чтения-записи данных - для доступа к шине генерирует прерывания; Линии запроса - разрешения Линии прерываний Линии данных Линии адреса В простом варианте конфигурации в крейте находится модуль арбитра шины,одно мастер-устройство и несколько слэйв-устройств. Для реализации функций арбитража шины и обработки прерываний часто используют одноплатные компьютеры. СПЕЦИФИКАЦИЯ VMEbus Базовая спецификация VMEbus (IEEE-1014-1987) имеет отличительные особенности : шина стандарта состоит из параллельной шин шины данных (8-32бита ) и шины управления адреса (16-32 бита), шина управления разбита на группы (также используется термины “bus”,” sub-bus”) для обеспечения следующих функций: арбитража шины передачи данных задания приоритета (до 7 уровней) мониторинга состояния (контроль на наличие ошибок) дополнительно имеется последовательная шина управления СПЕЦИФИКАЦИЯ VMEbus Используется структуры типа MASTER-SLAVE c поддержкой режима с несколькими мастер-устройствами. Обмен по шине асинхронный (отсутствует источник тактирования шины). Регулируемая скорость обмена информацией c автоматической подстройкой. Скорость обмена до 40 Мбайт/сек. КОНСТРУКТИВ VMEbus Система управления на основе VMEbus компонуется из функциональных модулей VME, устанавливаемых в крейты, реализованных в соответствии со стандартом Eurocard . Крейт представляет собой стандартный каркас с объединительной магистралью VME, источниками м питания ( 3-5 В) и вентиляцией. Объединительная магистраль представляет собой плату с размещенными на ней разъемами со специфицированными параметрами. Системная поддержка шины VMEbus Операционные системы для VMEbus OC UNIX OC WINTEL OC реального времени Solaris DOS VxWorks SunOs OS-2 pSOS Berkley Windows LynxOS 3.1 At&T Windows 95/98 QNX Linux Windows NT RTLinux Разработчики ОСРВ VxWorks Wind River c гордостью утверждают на своих семинарах, что они контролируют 100 % рынка ОСРВ на Марсе ТЕЛЕКОММУНИКАЦИОННЫЙ КАНАЛ ФУНКЦИОНАЛЬНЫЕ ТРЕБОВАНИЯ В БАЗОВОМ РЕЖИМЕ ЭКСПЛУАТАЦИИ КАНАЛ НЕСИММЕТРИЧНЫЙ ВЫСОКОУРОВНЕВЫЕ КОМАНДЫ ( DOWN-LINK), КАК ПРАВИЛО, ПЕРЕДАВАЛИСЬ РАЗ В СУТКИ С МАРСОХОДА ТРЕБОВАЛОСЬ ПРИНИМАТЬ ВИДЕО И ТЕЛЕМЕТРИЧЕСКУЮ ИНФОРМАЦИЮ ТРЕБОВАЛОСЬ ОБЕСПЕЧИТЬ ПОМЕХОУСТОЙЧИВОСТЬ КАНАЛА В УСЛОВИЯХ ВЫСОКОИНТЕНСИВНЫХ ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ ОТ СОЛНЦА. КОНЦЕПЦИЯ ПОСТРОЕНИЯ Канал передачи высокоуровневых команд, с помощью которых формировались задания на проведение исследований мог быть реализован несколькими способами Непосредственная связь с наземным центром управления обеспечивала скорость передачи данных несколько килобит/сек с помощью узконаправленной антенны, но при этом требовалось соответствующая ориентация антенны и несколько десятков ватт потребления Имелась возможность обмена через орбитальный ретранслятор или посадочный модуль, требовавшие меньшего потребления энергии. На этапе проектирования вероятность неудачи при использовании ретрансляторов оценивалась на уровне 40%