Нейросетевая аппроксимация границы области достижимости
реклама

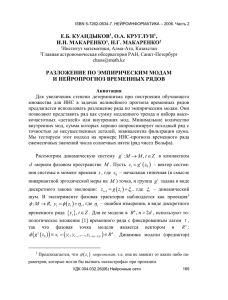
ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 Е.М. ВОРОНОВ, А.П. КАРПЕНКО, О.Г. КОЗЛОВА, А.Г. ТРОФИМОВ МГТУ им. Н. Э. Баумана Национальный исследовательский ядерный университет «МИФИ» [email protected], [email protected] НЕЙРОСЕТЕВАЯ АППРОКСИМАЦИЯ ГРАНИЦЫ ОБЛАСТИ ДОСТИЖИМОСТИ ЛЕТАЛЬНОГО АППАРАТА Рассматривается задача приближенного построения границы области достижимости динамической системы. Приводятся результаты исследования эффективности нейросетевых методов для приближенного построения дальней границы трехмерной области достижимости высокоманевренного летального аппарата. Введение Задача обеспечения траекторной безопасности летательного аппарата (ЛА) весьма актуальна в современной авиации. Одним из аспектов данной задачи является построение области достижимости летательного аппарата (ОДЛА). Поскольку построение ОДЛА в этом случае необходимо проводить в реальном времени, решение задачи путем многократного интегрирования соответствующей системы обыкновенных дифференциальных уравнений (ОДУ) возможно только с использованием параллельных вычислительных технологий. Целью работы является исследование возможности применения нейросетевого подхода для построения ОДЛА в реальном времени. Постановка задачи Уравнения движения центра масс ЛА в нормальной земной системе координат OXYZ описываются нелинейной системой ОДУ (1), где V – скорость ЛА, – угол наклона траектории, – угол поворота траектории, Y – высота ЛА, nT – тангенциальная перегрузка, n – нормальная перегрузка, c – скоростной угол крена, g – ускорение свободного падения [1]. Управления ЛА задаются вектором uT (nT , n, c ) : | nT | nTmax ; n n max ; | c | . УДК 004.032.26(06) Нейронные сети 102 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 V g (nT sin ); g V (n cos c cos ); g n sin c V cos ; (1) X V cos cos ; Y V sin ; Z V cos sin . ОДЛА определяется как множество значений координат центра масс ЛА в заданный момент времени T , полученных при заданном начальном состоянии ЛА и его всех возможных допустимых управлениях. Очевидно, что динамика ОДЛА однозначно определяется динамикой границ этой области. Аналитическое построение ОДЛА удается лишь в простейших случаях, не представляющих практического интереса. Поэтому для построения этой области приходится использовать приближенные численные методы. Приближенное построение ОДЛА может быть выполнено несколькими методами. Так, дискретную аппроксимацию ОДЛА можно построить путем многократного интегрирования модельной системы ОДУ при различных управлениях (метод мультифиниша). Даже при вычислениях на однопроцессорной ЭВМ значительное ускорение при построении ОДЛА можно обеспечить на основе аппроксимации векторного поля модельной системы ОДУ. Очевидной является идея использовать метод мультифиниша с заменой модельной системы ОДУ ее некоторой нейросетевой аппроксимацией. В работе рассматривается подход к построению ОДЛА, основанный на построении нейронной сети, выходами которой являются непосредственно координаты точек, принадлежащие области достижимости или ее границе. Целью работы является исследование эффективности такого подхода на примере построения дальней границы ОДЛА. В работе существенно используются результаты публикации [1], в которой получены структуры управлений, приводящих динамическую систему (1) на дальнюю границу области достижимости при фиксированном угле крена c (t ) const (рис. 1): УДК 004.032.26(06) Нейронные сети 103 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 u 1 u 0 uд 1 1 , u 2 1 t [0, t ] u 2 1 t [t , T ] (2) где t – время перехода на особый участок управления nособ 0 , n max u1 n, nTmax u 2 nT . n max u1 n, nTmax u 2 nT , Рис. 1. Структура управлений, приводящих на дальнюю границу ОДЛУ. Структура нейронных сетей Рассматривается три следующих нейронных сети [2], предназначенные для решения различных классов задач траекторной безопасности. Нейронная сеть 1 (НС1) определяет координаты дальней границы ОДЛА при задании граничного управления (2). Входы сети соответствуют параметрам задачи V0 , 0 , T , t , c . Сеть содержит два скрытых слоя, состоящих из одинакового количества персептронов с гиперболическим тангенсом в качестве функции активации. Выходной слой сети состоит из трех нейронов, соответствующих координатам X , Y , Z конечного положения ЛА (рис. 2). X (T ) V0 0 T НС1 tП с Y (T ) Z (T ) Рис. 2. Входы – выходы нейронной сети НС1 Нейронная сеть 2 (НС2) предназначена для отыскания расстояния до дальней границы ОДЛА в заданном направлении, определяемом углами УДК 004.032.26(06) Нейронные сети 104 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 , . Нейроны входного слоя соответствуют элементам V0 , 0 , T , , Выходом сети является длина радиус-вектора конечного положения ЛА на дальней границе ОДЛА. Отметим, что, вообще говоря, существуют такие направления, в которых ЛА в момент времени Т вообще не может оказаться на дальней границе ОДЛА – «запрещенные» направления. Сеть НС2 не способна самостоятельно выявить эти направления. Нейронная сеть 3 (НС3) определяет управление, приводящее ЛА на границу ОДЛА в заданном направлении , . Входами сети являются параметры V0 , 0 , T , , , а выходами – параметры управления c , t . Во всех трех нейронных сетях в качестве функций активации выходного слоя сети используются линейные функции активации. Результаты работы сети НС3 (параметры управления c , t ) можно подать на вход сети НС1. Полученные на выходе этой сети координаты X , Y , X , должны, очевидно, соответствовать точке, лежащей в заданном направлении , . Невыполнение данного условия означает, что направление , является «запрещенным». Схема исследования Рассматривается задача (1), в которой величины V0 , 0 , T варьируются в следующих пределах ( Vзв 331 .46 м/c – скорость звука в воздухе): ; 5 с T 15 с; c . (3) 8 8 Обучающая выборка состоит из 4500 элементов. Из нее случайным образом выбирается 20% проверочных точек для определения момента окончания обучения. Начальные веса и пороговые элементы нейронов каждого слоя устанавливаются в соответствии с алгоритмом инициализации НгуенВидроу (Nguyen-Widrow) [3]. Данный алгоритм выбирает такие их значения, чтобы область выходных значений каждого нейрона в слое была приблизительно равномерно распределена по области входных значений слоя. При генерации этих значений используются случайные числа. Обучение каждой из сетей выполняется 10 раз с различными начальными весами и пороговыми значениями, затем выбирается сеть с минимальным значением ошибки. Исследование точности аппроксимации обученной сети выполнено с использованием тестовой выборки, содержащей более 20000 элементов. Точность аппроксимации оценивается следующи1.6 Vзв V0 1.9 Vзв ; 0 УДК 004.032.26(06) Нейронные сети 105 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 _ ми величинами: средняя относительная погрешность ; средняя абсо_ лютная погрешность ; максимальная относительная погрешность max ; максимальная абсолютная погрешность max ; среднее квадратичное отклонение . Обучение и тестирование нейронных сетей выполнено в среде Matlab. Для обучения используется метод Левенберга-Маркардта (LevenbergMarquardt Algorithm) [4]. Результаты исследования В табл. 1 приведены результаты исследования точности аппроксимации дальней границы ОДЛА нейронной сетью НС1 с различным количеством нейронов N . Таблица 1 Точность аппроксимации границы ОДЛА сетями НС1 max % max 1.38 79.69 52.15 11.64 707.4 26 1.06 61.21 42.92 9.76 651.1 30 0.84 48.75 33.88 9.15 609.6 34 0.71 40.90 31.83 6.37 424.9 38 0.59 33.58 25.34 5.13 382.3 40 0.55 31.74 23.18 3.12 355.8 _ N % 22 _ Табл. 1 показывает, что с увеличением числа нейронов в сети погрешность аппроксимации стабильно уменьшается. Среднее и максимальное значение погрешности сети из 22 нейронов равны 1.38 и 11.6%, а для сети из 40 нейронов – 0.55 и 3.12% соответственно. Пример аппроксимации дальней границы ОДЛА, полученной с помощью сети НС1, приведен на рис. 3. УДК 004.032.26(06) Нейронные сети 106 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 Рис. 3. Аппроксимация ОДЛА нейронной сетью НС1 ( N 32 , V0 1.9 V зв , 0 0 , T 10 с ) Табл. 2 содержит аналогичные результаты исследования точности аппроксимации дальней границы ОДЛА сетью НС2, а табл. 3 – сетью НС3. Таблица 2 Точность аппроксимации границы ОДЛА сетями НС2 max % max 0.25 14.43 12.70 3.75 302.1 26 0.18 10.31 9.18 2.86 252.8 30 0.15 8.60 7.65 2.48 220.7 34 0.14 7.97 6.89 2.24 195.9 38 0.11 6.35 5.63 1.69 167.4 40 0.09 5.20 4.64 1.53 152.4 _ N % 22 _ УДК 004.032.26(06) Нейронные сети 107 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 Табл. 1 – 3 показывают, что сеть НС3 обеспечивает более высокую точность аппроксимации дальней границы ОДЛА по сравнению с сетью НС1, но меньшую точность по сравнению с сетью НС2. Таблица 3 Точность аппроксимации границы ОДЛА сетями НС3 max % max 0.83 47.03 52.73 8.21 593.2 26 0.63 35.77 38.35 6.96 415.5 30 0.50 28.56 31.42 5.47 395.1 34 0.43 24.52 26.97 4.29 346.9 38 0.35 20.19 22.21 3.12 280.2 40 0.34 18.46 20.71 3.06 275.4 _ N % 22 _ Таблица 4 Точность аппроксимации границы ОДЛА сетями НС1, НС3 max % max 1.79 103.29 83.67 15.75 839.1 26 1.38 78.66 62.14 13.26 715.4 30 1.08 61.56 49.56 12.41 620.4 34 0.93 53.47 42.78 8.52 556.2 38 0.75 42.97 32.23 6.69 426.1 40 0.72 41.04 30.37 5.13 405.3 _ N % 22 _ В табл. 4 приведены результаты исследования точности аппроксимации дальней границы ОДЛА с помощью последовательно соединенных сетей НС3 и НС1, каждая из которых имеет количество нейронов, равное УДК 004.032.26(06) Нейронные сети 108 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 N (рис. 4). Табл. 4 показывает, что результаты аппроксимации дальней границы ОДЛА последовательно соединенными сетями НС3, НС1 несколько хуже, чем сетью НС1 (табл. 1). Например, при N 22 значения средней погрешности равны 1.79 и 1.38%, а максимальной погрешности – 15.75 и 11.64% соответственно. Однако то, что указанные величины сравнимы, говорит о хорошей устойчивости комбинации сетей НС3, НС1 к погрешностям входных данных и позволяет сделать вывод о возможности их совместного использования. V0 0 T НС3 tП V0 0 T X (T ) НС1 Y (T ) Z (T ) Рис. 4. Последовательное соединение сетей НС3, НС1 Заключение Проведенное исследование подтвердило возможность применения нейронных сетей для аппроксимации границ ОДЛА. В ходе дальнейших работ планируется исследование быстродействия нейронных сетей НС1 – НС3 при их аппаратной реализации, а также сравнение результатов исследования этих сетей с результатами использования распределенных вычислительных систем при построении ОДЛА с помощью метода мультифиниша и метода аппроксимации векторных полей модельной системы ОДУ. Список литературы 1. Воронов Е.М., Карпунин А.А. Алгоритм оценки границ области достижимости летательного аппарата с учетом тяги // Вестник МГТУ им. Н.Э.Баумана, Сер. «Приборостроение». 2007. № 4 (69). C. 81–99. 2. Козлова О.Г. Нейросетевая аппроксимация границы области достижимости летательного аппарата. 1. Двумерный случай // Наука и образование: электронное научно-техническое издание, www.technomag.edu.ru, июль, 2009. УДК 004.032.26(06) Нейронные сети 109 ISBN 978-5-7262-1226-5. НЕЙРОИНФОРМАТИКА – 2010. Часть 1 3. Медведев В.С., Потемкин В.Г. Нейронные сети. – М.: Диалог МИФИ, 2001. – 496 с. 4. Hagan, M., Menhaj, M.B. Training Feedforward Networks with the Marquardt Algorithm // IEEE Transactions on Neural Networks. 1994.№5. P. 989-993. УДК 004.032.26(06) Нейронные сети 110