Лекция 3 - Методы ГНСС1
реклама

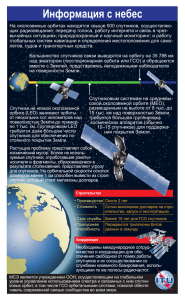
ГНСС-технологии в геодезии К.М. Антонович Часть 2. Основы теории ГНСС наблюдений Принципы позиционирования по СРНС 1. Местоположение антенны приемника определяется по расстояниям до спутников. В сущности, здесь решается линейная пространственная засечка. 2. Измерение расстояний до спутников производится по времени прохождения сигнала: = с. Реализован однонаправленный метод измерения расстояний (беззапросная спутниковая системы, допускающая одновременное использование ее многими пользователями). 3. Точная привязка к системам единого времени. Поправки часов спутников определяются с высокой точностью (единицы наносекунд). Поправки часов приемников определяются при наблюдениях как дополнительное неизвестное. Отсюда минимальное для наблюдений количество спутников равно 4. 4. Определение положений спутников в пространстве - элементы своей орбиты спутник сообщает вместе с информацией о своих часах, т.е. имеется информация о том, насколько часы идут не по единому времени. 5. Компенсация погрешностей. Ионосферные задержки исключаются при использовании двухчастотных приемников или данных навигационного сообщения (последний случай более грубый). Тропосферные погрешности ослабляются моделированием по данным наземных метеоизмерений или некоторыми другими способами. Некоторые погрешности ослабляются при правильном выборе места установки антенны. Широко применяемый прием для ослабления ошибок - использование свойств коррелированных ошибок (умение делать ошибки коррелированными). ВИДЫ СПУТНИКОВЫХ НАБЛЮДЕНИЙ ВИДЫ СПУТНИКОВЫХ НАБЛЮДЕНИЙ Компоненты уравнений псевдодальности и фазы Шум измерений. Уверенное разрешение измерений возможно на уровне точности в 1% или меньше от длины волны. Для двух основных видов GPS измерений расстояний уровень точности следующий. «Шум» псевдодальности: «Длина волны» C/A кода примерно 300 м, следовательно, разрешение псевдодальности или шум измерения расстояния равен 3 м. Однако есть тенденция довести разрешение C/A кода до величины менее метра. «Длина волны» P кода примерно 30 м, следовательно, шум измерения расстояния равен 0.3 м. «Шум» фазы несущей: Длина волны несущей L1 примерно 0.19 м, что подразумевает миллиметровое разрешение измерений фазы. Длина волны несущей L2 примерно 0.24 м, что также подразумевает миллиметровый уровень шума измерений фазы. Компоненты уравнений псевдодальности и фазы Компоненты уравнений псевдодальности и фазы Влияние атмосферы: Компоненты уравнений псевдодальности и фазы Компоненты уравнений псевдодальности и фазы Многопутность: Методы ГНСС позиционирования В абсолютном методе приемник определяет свои координаты, скорость и время по спутникам СРНС независимо от других приемников. Абсолютный метод Принцип определения положения – трилатерация: Абсолютный метод Три сферы: Абсолютный метод Влияние геометрии: ДИФФЕРЕНЦИАЛЬНЫЙ МЕТОД Широкозонный дифференциальный метод Относительный метод Целью относительного позиционирования является определение координат неизвестной точки по отношению к известной точке, которая в большинстве применений является стационарной. Другими словами, относительное позиционирование нацелено на определение вектора между двумя точками, которые часто называют вектором базовой линии или просто базовой линией. Пусть А – опорная (известная) точка, В – неизвестная точка, а DAB – вектор базовой линии. Вводя соответствующие векторы положения RA, RB, можно составить соотношение RB=RA+DAB, Проект сети Радиальный метод Последовательный метод Комбинация радиального и последовательного методов Обработка наблюдений Программные комплексы, как правило, включают главную программу, управляющую модулями, выполняющие следующие процессы: планирование сеансов наблюдений или доступности спутников , работу с проектами, пересылку данных, редактирование данных, обработку базовых линий, обзор сети, преобразование координат, уравнивание геодезической сети, вывод результатов обработки. Обработка наблюдений Решение отдельный базовых линий, Контроль решений по статистическим критериям и невязкам замкнутых фигур, Минимально ограниченное (свободное) уравнивание, Уравнивание с ограничениями, перевод координат в пользовательскую систему, вычисление нормальных высот.