Визильтер Ю.В
реклама

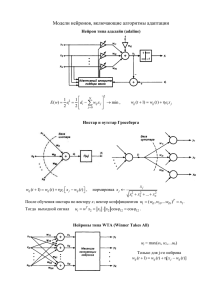
Реляционные модели формы изображений и метрики их сравнения Ю.В. Визильтер, А.Ю. Рубис, [email protected] Москва, ФГУП «Государственный научно-исследовательский институт авиационных систем» Задача: сравнение изображений по форме f g Насколько похожи ли эти изображения? Ответ на этот вопрос дает морфология Пытьева, позволяющая осуществлять сравнение изображений не по яркости, а по форме. Пытьев Ю.П., Чуличков А.И. Методы морфологического анализа изображений // М.: ФИЗМАТЛИТ, 2010. 336с. Задача: сравнение изображения с формой Морфологические квазирасстояния Морфологические коэффициенты корреляции Пытьева: d M ( g , F ) g PF g , K M ( g , F ) PF g g , d M ( f , G ) f PG f K M ( f , G ) PG f f В общем случае KM(g,F)KM(f,G). Это схема яркостногеометрического сравнения изображений с формами f ( x, y) i 1 fi Fi ( x, y) n Изображения – векторы, Формы – гиперплоскости. Задача: сравнение форм TV Необходимо перейти от яркостно-геометрического сравнения изображений с формами к чисто геометрическому сравнению форм Контурные методы работают плохо IR Нужно определить метрики или меры сходства форм Компаративная морфология. В предыдущих работах авторов: • Предложены меры сходства форм-разбиений на основе статистического усреднения проецируемых изображений и получено выражение для среднеквадратичного эффективного коэффициента морфологической корреляции форм-разбиений. • Предложены симметричные нормированные коэффициенты геометрической корреляции форм-разбиений. • Предложен способ корреляционного сравнения формразбиений с упорядоченной яркостью. • Предложено трансформационное расстояние (метрика редактирования) для оценки геометрических отличий мозаичных форм (ОГО-метрика). Трансформационные метрики. Расстояние Левенштейна Трансформационное расстояние – минимальная стоимость цепочки преобразований, переводящей A в B: ДЫМ ДЫМА ДАМА МАМА Расстояние Хемминга dH между строками одинаковой длины определяется как число позиций, в которых символы не совпадают (равно числу операций замены символа). Расстояние Левенштейна dL равно минимальному числу операций для преобразования одной строки в другую, когда множество элементарных операций состоит из операций вставки, удаления и замены. Простейшая метрика сравнения форм-разбиений на основе слияния-разбиения областей Структурное расстояние между формами – минимальное число операций слияния-разбиения, необходимое для перехода от одной формы другой. (Контр) Пример сравнения форм при помощи структурного расстояния редактирования. Метрика оценки геометрических отличий (ОГО) d H ( F , G) j 1 i 1 pij d H (G j , Fi ), m n где n и m – соответствующе количества областей разбиения F и G; S – площадь кадра ; pj Si – площадь области разбиения Fi; pi pij Sj – площадь области разбиения Gj; Sij – площадь пересечения FiGj; pi = Si / S – нормированная площадь области разбиения Fi; pj = Sj / S – нормированная площадь области разбиения Gj; pij = Sij / S – нормированная площадь пересечения FiGj; dH(Gj,Fi) = pi + pj – 2pij – нормированное расстояние Хэмминга между областями разбиения Fi и Gj. Метрика ОГО как трансформационная метрика Утверждение. Для любых форм F и G всегда существует такая проходящая через FG цепочка преобразований w, состоящая из k элементарных разбиений и l элементарных слияний, причем сначала следуют все разбиения, а затем все слияния: F=W0W1…Wk-1Wk=FGWk+1…Wk+l-1Wk+l =G, для которой справедливо следующее равенство: d H ( F , G) t 1 d H (Wt 1 ,Wt ) k l (Сумма расстояний между последовательными элементами цепочки равна расстоянию от первого до последнего элемента) Вывод: Метрика dH(F,G) имеет структуру трансформационного расстояния с элементарными операциями слияния и разбиения областей, стоимость которых определяется на каждом шаге расстоянием dH(Wt-1,Wt) между исходной и получившейся после данного элементарного преобразования формами. Свойства метрического пространства с ОГО-метрикой: геодезические линии не являются единственными Легко убедиться, что ОГО-метрика не является евклидовой. Пример пучка геодезических траекторий, отличающихся порядком разбиений и слияний Свойства метрического пространства с ОГО-метрикой: геодезические многообразия являются дискретными Иллюстрация дискретности геодезических многообразий в пространстве мозаичных форм на примере семейства бинарных форм dH(F,G) = dH(F,V(x)) + dH(V(x),G) (x-a)2 + (b-x)2 – (b-a)2 = 0 x2 – (b+a)x +ba = 0 (x = a ) или (x=b). Значит, из всех форм семейства V(x) геодезическому многообразию D(F,G) принадлежат лишь сами формы F=V(a) и G=V(b). Другой подход: метрическое сравнение форм как моделей, описывающих отношения между элементами мозаичного изображения (реляционных моделей) Предыдущие работы (Источник 1) В морфологии Пытьева [1] предложена схема описания формы изображений на основе базисных функций, связанных с разбиением кадра на непересекающиеся области. Порождаемые таким образом модели формы можно назвать T-моделями (Tessellation based shape models). f(x,y) = i=1,..,n fi Fi(x,y). F1 F = { i=1,..,n fi Fi(x,y): fRn}. 1, Fi ( x, y) 0, if ( x, y) Fi ; otherwise. F3 F2 Image f(x,y) F4 Tessellation F [1] Пытьев Ю.П., Чуличков А.И. Методы морфологического анализа изображений // М.: ФИЗМАТЛИТ, 2010. 336с. Предыдущие работы (Источник 2) В работах [2], [3] был предложен альтернативный способ описания формы изображений, названных авторами знаковым представлением изображений и основанный на рассмотрении множества яркостных отношений между пикселами изображения, что эквивалентно частично упорядоченным по яркости T-моделям. [2] Каркищенко А.Н., Гончаров А.В. Исследование устойчивости знакового представления изображений // Автоматика и телемеханика. №9. С. 57-69. 2010. [3] Броневич А.Г., Гончаров А.В. Аксиоматический подход к измерению информативности знаковых представлений изображений // Известия РАН. Теория и системы управления. №6. C. 206-218. 2010. Предыдущие работы (Источник 3) В работе [4] было введено понятие т.н. EMD-метрик*, используемых для сравнения «гистограммоподобных» описаний, представленных конечным множеством пар <Fi,hi>, где Fi – i-й «объект» описания, а hi – его «вес» (значимость в описании): d EMD ( F , G) min( hij ) j 1 i 1 hij d E ( Fi , G j ) m n Здесь dE – базовая (Earth) метрика, а веса удовлетворяют условиям: m j 1 h j 1, n h h , h h 1, i 1 i i, j : hij 0, Si m n j 1 i 1 ij m j 1 ij n j 1 h i 1 ij [4] Y. Rubner, C. Tomasi, and L. J. Guibas. “The Earth Mover’s Distance as a Metric for Image Retrieval”, International Journal of Computer Vision, 40(2):99-121, 2000. *Частный случай метрик Монжа-Канторовича Предыдущие работы (Источник 3) d EMD ( F , G) min( hij ) j 1 i 1 hij d E ( Fi , G j ) m n hi i hij hj Оптимизация «перевозок» весов из гистограммы в гистограмму = «Транспортная задача» j Задача решается методом линейного программирования В данной работе (анонс результатов): 1. Для рассмотрения произвольных типов отношений между областями разбиения кадра (не только по яркости, но и по размеру, по форме, по текстуре, по взаимному расположению и т.п.) будет определен более общий класс реляционных моделей формы изображений или TR-моделей (Tessellation based Relational shape models). 2. Будет описан формализм TR-моделей и показаны перспективы их практического применения в задаче сравнения изображений по форме. 3. Будет показано, что метрики сравнения TR-моделей представляют собой специальный класс EMD-метрик, который предлагается называть RMD-метриками. Морфология Пытьева. Описание форм Множество изображений одной формы разбиения кадра F – выпуклое и замкнутое подпространство FL2(): F { f ( x, y) i 1 f i Fi ( x, y), f R } n n Для любого изображения g(x,y)L2() может быть определена проекция на форму F: g F ( x, y ) PF g ( x, y ) i 1 g Fi i ( x, y ), n g Fi ( Fi , g ) Fi , i 1, , n 2 PF – оператор проекции или проектор на F. Формы – замкнутые и выпуклые подпространства линейного пространства изображений. Морфология Пытьева. Сложность форм Формы-разбиения частично упорядочены по сложности: Для любых форм F и G можно указать форму более сложную FG и менее сложную FG. • Более сложные формы получаются из менее сложных разбиением, • Менее сложные из более сложных – слиянием областей. Альтернативное описание форм отношениями пикселов Введем предикат бинарного отношения пикселов «равно/неравно по яркости»: 1, если f ( x, y ) f (u, v); F ( x, y , u , v ) 0, если f ( x, y ) f (u, v). Определим L1-норму TR-формы F(x,y,u,v): F F ( x, y, u, v) dx dy du dv. Пусть изображения из F и G имеют вид f ( x, y ) i 1 f i Fi ( x, y ), n g ( x, y ) j 1 g j Gj ( x, y ) m тогда 0, если i : Fi ( x, y ) Fi (u, v); F ( x, y , u , v ) 1, в противном случае, 0, если j : Gj ( x, y ) Gj (u, v); G ( x, y , u , v ) 1, в противном случае, то есть TR-формы будут кусочно-постоянными 4D функциями. Альтернативное описание форм отношениями областей Рассмотрим форму W = F G с областями Wij = Fi Gj. Для нее можно записать 0, если i k , Wij ,Wkl Fi ; F (Wij ,Wkl ) 1, в противном случае, 0, если j l , Wij ,Wkl G j ; G (Wij ,Wkl ) 1, в противном случае, Любые операции над T-формами F и G могут быть описаны в терминах операций над такими бинарными матрицами размера (mn)2. В частности F j 1 i 1 l 1 k 1 Sij Skl F Wij ,Wkl , m n m n где Sij, Skl – площади областей разбиения Wij,Wkl. Матрицы отношений "равно/неравно" для 1D-функций f g SF1 SF2 0 F = 1 1 SF3 1 1 0 1 1 0 G = SG1 SG2 0 1 1 0 Описание форм с упорядоченной яркостью пикселов Для описания форм-разбиений с частично упорядоченной яркостью введем векторный бинарный предикат =1,2 для описания всех возможных отношений упорядоченности по яркости «пикселы больше/меньше/равны/неравны по яркости»: 0,0 , если f ( x, y ) f (u , v); 1,0 , если f ( x, y ) f (u , v); τ F ( x, y , u , v ) 0,1 , если f ( x, y ) f (u , v); 1,1 , если f ( x, y ) f (u , v). Значение 1,1 означает, что данная пара пикселов в данной форме F не упорядочена по яркости. Определим L1-норму TR-формы F(x,y,u,v): τ F τ F ( x, y, u, v) dx dy du dv, где | F(x,y,u,v) | = F(x,y,u,v)1 + F(x,y,u,v)2. Описание форм с упорядоченной яркостью пикселов Пусть изображения из F и G имеют вид кусочно-постоянных функций, причем все значения {fi} являются различными, как и все значения {gj}. Тогда 0,0 , если i : Fi ( x, y ) Fi (u , v); 1,0 , если i, k : Fi ( x, y ) Fk (u , v) 1, f i f k ; τ F ( x, y , u , v ) 0,1 , если i, k : Fi ( x, y ) Fk (u , v) 1, f i f k ; 1,1 , в противном случае, 0,0 , если j : Gj ( x, y ) Gj (u, v); 1,0 , если j , l : Gj ( x, y ) Gl (u , v) 1, g j g l ; τ G ( x, y , u , v ) 0,1 , если i, k : Gj ( x, y ) Gl (u , v) 1, g j g l ; 1,1 , в противном случае, Описание форм с упорядоченной яркостью областей Следовательно, такие TR-формы также можно записать в виде векторных бинарных матриц размера (mn)2: f ( x, y ) i 1 f i Fi n 0,0 , если i k , Wij , Wkl Fi ; 1,0 , если f i f k ; τ F (Wij , Wkl ) 0,1 , если f i f k ; 1,1 , в противном случае , ( x, y ), g ( x, y ) j 1 g j Gj ( x, y ) m Выражение для L1-нормы: 0,0 , если j l , Wij , Wkl G j ; 1,0 , если g j g l ; τ G (Wij , Wkl ) 0,1 , если g j g l ; 1,1 , в противном случае. τ F j 1 i 1 l 1 k 1 Sij S kl F Wij ,Wkl 1 F Wij ,Wkl 2 . m n m n Матрицы отношений "больше" для 1D-функций f g SF1 SF2 0 1F = 0 1 SF3 1 0 0 0 1 0 SG1 SG2 0 1 0 0 1G = Матрицы отношений "меньше" для 1D-функций f g SF1 SF2 2F = SF3 0 0 1 1 1 1 0 0 0 SG1 SG2 0 0 1 0 2G = Описание форм-разбиений произвольными отношениями Обобщение 1. Пусть дано некоторое изображение f(x,y) и некоторый упорядоченный набор (вектор) r функций отношения TR(a,b): R2R, t = 1,…,p. R-моделью изображения f по набору отношений r между пикселами назовем векторную функцию ρ F ( x, y, u, v) TR( f ( x, y ), f (u, v)) t 1 TR-моделью изображения f формы F по набору отношений r между областями разбиения назовем векторную матрицу p ρ F ( Fi , Fk ) TR( f ( x, y ), f (u, v) : ( x, y ) Fi , (u, v) Fk ) t 1. При сравнении TR-моделей изображений f и g формы F и G соответственно, TR-модели F(Fi,Fk) и G(Gj,Gl) эквивалентно преобразуются к виду F(Wij,Wkl) и G(Wij,Wkl), где Wij = Fi Gj. При этом L1-норма обобщенной TR-модели F(x,y,u,v) определяется m n m n p выражением ρ F j 1 i 1 l 1 k 1 Sij Skl t 1 Ft (Wij ,Wkl ) . p L1-метрика в пространстве T-моделей Рассмотрим расстояние Хэмминга (L1-метрику) между формамиотношениями «равно/неравно по яркости» F(x,y,u,v) и G(x,y,u,v): d ( F , G) F ( x, y, u, v) G ( x, y, u, v) F ( x, y, u, v) G ( x, y, u, v) dx dy du dv (1) Для кусочно-постоянных функций выражение (1) можно преобразовать к виду d ( F , G) j 1 i 1 l 1 k 1 Sij S kl F (Wij ,Wkl ) G (Wij ,Wkl ) , m n m n где Sij, Skl – площади областей Wij,Wkl, причем 0, если F (Wij ,Wkl ) G (Wij ,Wkl ); F (Wij ,Wkl ) G (Wij ,Wkl ) 1, в противном случае. L1-метрика T-моделей и ОГО-метрика Введем обозначение 1, если i k , j l или i k , j l ; (i, j, k , l ) 0, в противном случае. Тогда d ( F , G) j 1 i 1 l 1 k 1 Sij S kl (i, j, k , l ) m n m n j 1 i 1 Sij ( Si S j 2Sij ), m n где Si и Sj – площади областей Fi и Gj. Таким образом, при S=1 мы получаем метрику оценки геометрических отличий (ОГО-метрику) для T-форм F и G: d ( F , G) j 1 i 1 Sij d H ( Fi ,G j ), m n (2) где dH(Fi,Gj) = Si + Sj – 2Sij – расстояние Хэмминга (L1-метрика) между парами областей Fi и Gj. L1-метрика отношений "равно/неравно" для 1D-функций f g SF1 SF2 0 F = 1 1 SF3 1 1 0 1 1 G = 0 | F - G | = 0 1 1 0 0 1 1 1 0 0 0 0 1 0 SG1 SG2 0 1 1 0 0 1 d ( F , G) j 1 i 1 l 1 k 1 Sij S kl F (Wij ,Wkl ) G (Wij ,Wkl ) m n m n L1-метрики в пространстве TR-моделей Аналогичным образом можно ввести L1-метрику для сравнения «знаковых представлений»: d ( F , G) τ F ( x, y, u, v) τ G ( x, y, u, v) j 1 i 1 l 1 k 1 Sij S kl t 1 Ft Wij ,Wkl Gt Wij ,Wkl . m n m n 2 (3) Обобщение 2. В общем случае для сравнения TR-моделей можно ввести L1-метрику вида d ( F , G) ρ F ( x, y, u, v) ρG ( x, y, u, v) j 1 i 1 l 1 k 1 Sij S kl t 1 Ft Wij ,Wkl Gt Wij ,Wkl . m n m n p (4) L1-метрики отношений "больше" для 1D-функций f g SF1 SF2 0 1F = 0 1 SF3 1 0 0 0 1 SG2 0 1 0 0 1G = 0 | 1F - 1G | = SG1 0 1 0 0 0 0 0 1 0 1 1 0 1 1 1 0 L1-метрики отношений "меньше" для 1D-функций f g SF1 SF2 2F = SF3 0 0 1 1 1 1 0 0 SG2 0 0 1 0 2G = 0 | 2F - 2G | = SG1 0 0 1 1 0 0 0 1 1 1 1 1 1 1 0 0 Метрики сравнения TR-моделей как EMD-метрики EMD-метрики используются для сравнения «гистограммоподобных» описаний, представленных конечным множеством пар <Fi,hi>, где Fi – i-й «объект» описания, а hi – его «вес» (значимость в описании): d EMD ( F , G) min( hij ) j 1 i 1 hij d E ( Fi , G j ), m n (5) Здесь dE – базовая (Earth) метрика, а веса удовлетворяют условиям: m j 1 0, h h , h h j 1, i, j : hij n h 1, i 1 i m i j 1 ij m n j 1 i 1 ij n j h 1, h. i 1 ij При выборе в качестве «объектов» элементарных областей Fi и Gj, в качестве их «весов» hi = Si / S, hj = Sj / S, hij = Sij / S, а в качестве базовой метрики расстояния Хэмминга dH(Fi,Gj), EMD-метрика (5) превращается в ОГО-метрику (2). Метрики сравнения TR-моделей как EBD-метрики Назовем EBD-метрикой сравнения форм-разбиений (Earth Based Shape Distance, EBSD-метрика) метрику следующего вида: d ESMD ( F , G) j 1 i 1 Sij d E ( Fi , G j ), m n (6) где dE(Fi, Gj) – любая базовая (Earth) метрика dE, позволяющая попарно сравнивать какие-либо характеристики областей Fi и Gj. В частности, для сравнения форм-разбиений с частично или полностью упорядоченной яркостью определим d ( Fi , G j ) l 1 k 1 S kl τ F Wij ,Wkl τ G Wij ,Wkl , (7) d ( F , G ) j 1 i 1 Sij d ( Fi , G j ). (8) m m n n EBD-метрика (8) эквивалентна ранее введенной L1-метрике (3). RBD-метрики для сравнения форм-отношений Обобщение 3. EBD-метрики второго порядка вида d ( F , G) j 1 i 1 l 1 k 1 Sij S kl d (ρ F (Wij ,Wkl ), m n m n ρG (Wij ,Wkl )), (9) где d(F(Wij,Wkl), G(Wij,Wkl)) – предбазовая метрика сравнения отношений предлагается называть RBDметриками (Relation Based Distance). RMD-метрики и задачи оптимизации RBD-метрик Обобщение 4. Если значения Sij трактовать не как набор площадей пересечения областей кадра фиксированной геометрии, а как набор переменных мер соответствия между элементами обобщенной реляционной модели формы, то для определения RMD-метрики (Relation EMD) необходимо решать оптимизационную задачу следующего вида: d ( F , G) j 1 i 1 l 1 k 1 Sij S kl d (Wij ,Wkl ) m n m n min( Sij var, Si , S j const), m S S , j j 1 n S S , i i 1 i, j : Sij 0, Si j 1 Sij m , S m j 1 n S S , ij i 1 n j (10) i 1 Sij . Это задача квадратичного программирования, разрешимая по КунуТакеру. Потенциальные области применения • Сравнение моделей сегментированных изображений сцен с наборами пространственных и семантических отношений между объектами; • Сравнение описаний формы сегментированных 2D и 3D фигур с наборами топологических, геометрических и других отношений между частями фигур; • Сравнение результатов классификации и кластеризации в многомерных пространствах признаков в задачах машинного обучения. • Сравнение теорий (онтологий), описывающих единую предметную область. Сравнение моделей сегментированных изображений сцен с наборами пространственных и семантических отношений между объектами 1 1. Сохранены площади, относительные ориентации и расположения 2 2. Сохранены относительные расположения 3 3. Сохранены только площади Сравнение описаний формы сегментированных 2D и 3D фигур с наборами топологических, геометрических и других отношений между частями фигур Сравнение результатов классификации и кластеризации в многомерных пространствах признаков в задачах машинного обучения fX fX gX gX FX X GX X Заключение 1. В работе предложен обобщенный класс моделей описания формы сегментированных изображений набором произвольных отношений между областями разбиения кадра – TR-модели (Tessellation based Relational shape models). 2. Показано, что получаемые на основе TR-моделей метрики сравнения форм в общем случае представляют собой специальный класс EMD-метрик второго порядка, который предложено называть RMD-метриками (Relation Moving Distance). 3. Возможные направления дальнейших исследований могут быть связаны с построением конкретных прикладных RMD-метрик, а также с построением RMD-метрик для сравнения предметных онтологий (онтологических метрик). Литература [1] Пытьев Ю.П., Чуличков А.И. Методы морфологического анализа изображений // М.: ФИЗМАТЛИТ, 2010. 336с. [2] Каркищенко А.Н., Гончаров А.В. Исследование устойчивости знакового представления изображений // Автоматика и телемеханика. №9. С. 57-69. 2010. [3] Броневич А.Г., Гончаров А.В. Аксиоматический подход к измерению информативности знаковых представлений изображений // Известия РАН. Теория и системы управления. №6. C. 206-218. 2010. [4] Y. Rubner, C. Tomasi, and L. J. Guibas. “The Earth Mover’s Distance as a Metric for Image Retrieval”, International Journal of Computer Vision, 40(2):99-121, 2000. [5] Визильтер Ю.В., Рубис А.Ю. Морфологические коэффициенты корреляции форм изображений для задач комплексирования многоспектральной видеоинформации // Вестник компьютерных и информационных технологий, N3, 2012, с.14-20. [6] H. Ling and K. Okada. “EMD-L1: An Efficient and Robust Algorithm for Comparing Histogram-Based Descriptors”, European Conference on Computer Vision (ECCV), LNCS 3953, III:330-343, 2006.