Соглашение 14.607.21.0128
реклама

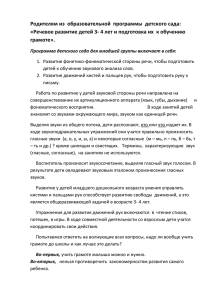
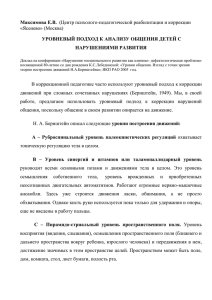
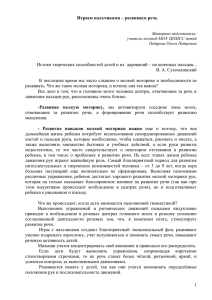
<Номер соглашения> <Номер постера> Федеральная целевая программа «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014—2020 годы» Науки о жизни Тема: Разработка роботизированного комплекса для реабилитации постинсультных и посттравматических больных с использованием технологии «интерфейс мозг-компьютер» Соглашение 14.607.21.0128 на период 2015 - 2017 гг. Руководитель проекта: зав.отделом РНИМУ им.Н.И.Пирогова Фролов А.А. Получатель субсидии: ГБОУ ВПО РНИМУ им. Н.И. Пирогова Минздрава России Цели и задачи проекта Цель проекта: разработка и создание роботизированного комплекса, состоящего из бимануального экзоскелета и управляющего им по сигналам электрической и гемодинамической активности мозга интерфейса мозг-компьютер, для реабилитации и жизнеобеспечения постинсультных и посттравматических больных с серьезными двигательными нарушениями. Задачи проекта: 1) Создание компьютерной динамической модели бимануального экзоскелета и разработка контроллера экзоскелета на основе биологически адекватного управления "естественными синергиями«; 2) Создание системы сопряжения контроллера экзоскелета и гибридного интерфейса мозг-компьютер, управляемого по сигналам электрофизиологической и гемодинамической активности мозга, соответствующей воображению движений. Актуальность задачи: Сосудистые заболевания мозга занимают первое место в структуре инвалидизации населения. При этом, почти половина пациентов, перенесших инсульт, при выписке из реабилитационного стационара передвигаются только на кресле-коляске, менее 15% могут передвигаться в помещении самостоятельно, менее 10% - выходить на улицу и т.п. Показано, что нарушение функции верхней конечности более выражено, чем нижней. Таким образом, крайне актуальным является поиск новых реабилитационных технологий, к числу которых относятся экзоскелеты, управляемые интерфейсом «мозг-компьютер». Ожидаемые результаты проекта 1. Создание податливого экзоскелета, имеющего коэффициенты в петле обратной связи, сравнимые с соответствующими коэффициентами у человека, и который бы воспринимался человеком наиболее комфортно. 2. Изготовление и испытание экзоскелетов двух рук с полным набором степеней свободы, характерным для рук человека, позволяющий исполнять неограниченный репертуар движений, включая бимануальные. 3. Разработка системы управления экзоскелетом, основанной на гибридном интерфейсе мозг-компьютер, использующем результаты анализа как электрофизиологической, так и гемодинамической активности мозга. В настоящее время ни одна из перечисленных выше задач не решена. Представляется, что результатом проекта будет уникальная роботизированная реабилитационная установка, не имеющая аналогов в мире. Перспективы практического использования Все методы, включая использование экзоскелетов, предполагают сохранение остаточных двигательных функций. Не существует признанных методов, которые обеспечивали бы двигательную реабилитацию больных, у которых мышцы полностью парализованы, и которые поэтому не могут участвовать в стандартных процедурах тренировки. В этом случае единственным методом стимулирования пластичности мозга является воображение движений. В большинстве работ по использованию интерфейсов мозг-компьютер для двигательной реабилитации отмечается значительное улучшение двигательных функций по сравнению со стандартными реабилитационными процедурами. Хорошо известно, что больные легче выполняют высоко значимые мотивированные движения, чем движения, аналогичные по кинематике, но не имеющие функциональной цели. Поэтому крайне важна возможность выбора индивидуальных тренировочных движений, включающих все степени свободы руки. Введение в клиническую практику постинсультной реабилитации процедуры восстановления движений с помощью многосуставного экзоскелета руки, управляемого гибридным интерфейсом мозг-компьютер, должно существенно повысить эффективность лечения постинсультных больных. Результаты исследовательской работы, полученные в 2015 г. Расположение сенсоров электромагнитной системы регистрации движений "Ascension 3D guidance trakSTAR" фирмы "Ascension Technology" (США) на руках человека Траектории последовательных движения всех суставов двух рук при имитации ловли мяча Конструкторская компьютерная модель экзоскелета двух рук 1. Разработан программно-аппаратный комплекс для регистрации движений двух рук на основе использования электромагнитной системы регистрации движений "Ascension 3D guidance trakSTAR" фирмы "Ascension Technology" (США), включающий систему фиксации сенсоров на руках и корпусе человека, программу синхронной записи 11 сенсоров, программу расчета анатомических осей вращения в суставах и программу визуализации движений. 2. Разработан протокол для регистрации совместных движений двух рук и движений рук по отдельности. Проведены предварительные эксперименты по движению рук к различным целям в пространстве и целевого движения, имитирующего хватание летящего мяча. 3. Отобрана контрольная группа из 5 здоровых испытуемых, которые будут тренироваться на управление экзоскелетом двух рук с помощью интерфейса мозг-компьютер (ИМК). Оценена их способность на управление ИМК по показателям точности распознавания паттернов ЭЭГ, соответствующих воображению сжатия кистей левой и правой руки. 4. Спроектирован экзоскелет двух рук со всеми степенями свободы, присущими рукам человека. Партнеры проекта Индустриальные партнеры проекта: Научно-производственное объединение «Андроидная техника» (г. Магнитогорск) – предприятие, специализирующееся на разработке, создании и производстве антропоморфных и биоморфных робототехнических систем различного назначения. «НПО «Андроидная техника» предприятие с большим опытом выполнения государственных контрактов, в число ключевых компетенций которого входят работы в области механики, электромеханики, мехатроники, сенсорных систем, систем управления. Индустриальный партнер финансирует работы по проекту за счет собственных средств. Соисполнитель проекта: Публичное акционерное общество «Химспецстрой» (г. Самара) – предприятие, сферой деятельности которого является проведение научно-исследовательских работ и разработок в области производственных, строительных и разведывательных работ. Одним из направлений деятельности компании является реализация принципа конструкций и процессов предельных параметров, в том числе в области электромеханики, мехатроники, экзоскелетных решений, систем управления робототехническими конструкциями. Работы соисполнителя финансируются из госбюджета. <Номер постера>