МОДЕЛИРОВАНИЕ САР
advertisement

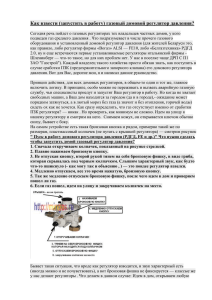
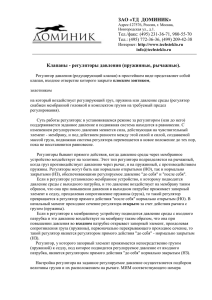
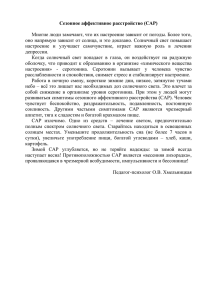
МОДЕЛИРОВАНИЕ САР 1. 2. 3. Исследование объекта регулирования Исследование одноконтурной системы регулирования Исследование каскадной системы регулирования 1. Исследование объекта регулирования Для исследования системы автоматического регулирования используется модель объекта регулирования, построенная с помощью Xcos — инструмента визуального моделирования в пакете Scilab. Предполагается, что объект регулирования снабжён исполнительным устройством и датчиками регулируемого параметра и вспомогательного параметра. Вид блока, визуально представляющего модель объекта регулирования, приведён на рис. 1: y – регулируемый параметр; y1 – вспомогательный промежуточный параметр; d1 и d2 – возмущающие воздействия; u – управляющее воздействие. Файл *.zcos, указанный в варианте задания для каждого студента, содержит модель объекта регулирования, которая должна использоваться при выполнении всех пунктов задания. Однако во всех расчётах необходимо использовать приближённые передаточные функции объекта регулирования, определённые в ходе выполнения 1-го пункта задания. Рис. 1. Вид блока для моделирования объекта регулирования с помощью Xcos. 1.1. Получить переходные характеристики объекта регулирования: по каналу «управляющее воздействие – регулируемый параметр» u(τ) → y(τ) по каналу «управляющее воздействие – промежуточный вспомогательный параметр» u(τ) → y1(τ). 1.2. По переходным характеристикам определить приближённые передаточные функции объекта регулирования: 1.3. Используя переходную характеристику объекта управления по каналу «управляющее воздействие – регулируемый параметр» u(τ) → y(τ), составить «прогноз»: 1.3.1. можно ли регулирования? получить с помощью одноконтурной САР приемлемое качество 1.3.2. какие из традиционных линейных законов регулирования можно использовать в одноконтурной САР данным объектом? 1.3.3. каковы должны быть значения регулирование было «наилучшим»? параметров настройки регуляторов, чтобы 2. Исследование одноконтурной системы регулирования Структурная схема одноконтурной системы автоматического регулирования (САР) приведена на рис. 2: y – регулируемый параметр; y1 – вспомогательный промежуточный параметр; P – регулятор; d1 и d2 – возмущающие воздействия; u – управляющее воздействие; yзд – заданное значение регулируемого параметра; ε – погрешность регулирования. Рис. 2. Структурная схема одноконтурной системы регулирования. 2.1. Определить регулятора: критическую частоту ωкр и максимальный 2.1.1. расчётным путём, используя приближённую регулирования Y(s)/U(s), найденную в п. 1.2; коэффициент передаточную усиления Kрmax П функцию объекта 2.1.2. «экспериментально», то есть в ходе имитационного моделирования подобрать коэффициент усиления регулятора так, чтобы система регулирования оказалась на границе устойчивости (регулируемый параметр совершал незатухающие колебания). Сравнить полученные значения ωкр и Kрmax и оценить, как реальные показатели качества регулирования будут отличаться от ожидаемых, если при расчёте настройки регулятора использовать приближённую передаточною функцию объекта регулирования. 2.2. Получить переходные характеристики системы регулирования: 2.2.1. для трёх входных воздействий yзд(τ), d1(τ), d2(τ); 2.2.2. для всех традиционных линейных законов регулирования (П, И, ПИ, ПД, ПИД); 2.2.3. для нескольких значений (2..4) каждого из параметров настройки регулятора. 2.3. По переходным характеристикам САР определить показатели качества регулирования, построить графики показатель качества = f (параметр настройки регулятора) и сделать выводы относительно влияния на качество регулирования: 2.3.1. входного воздействия; 2.3.2. закона действия регулятора; 2.3.3. параметров настройки регулятора. Замечание. Работу следует спланировать так, чтобы при минимальном числе опытов выяснить влияние на качество регулирования каждого из исследуемых факторов: входного воздействия, закона регулирования, параметра настройки регулятора. Если не удастся получить устойчивое регулирование, следует указать возможные причины неустойчивости. 3. Исследование каскадной системы регулирования Структурная схема каскадной двухконтурной системы регулирования приведена на рис. 3: y – регулируемый параметр; y1 – вспомогательный промежуточный параметр; P – основной регулятор; P1 - вспомогательный регулятор; d1 и d2 – возмущающие воздействия; u – управляющее воздействие; yзд и y1зд – задающие воздействия для основного и вспомогательного регуляторов; ε и ε1 – погрешности регулирования основного и вспомогательного регуляторов. Основной регулятор реализует пропорционально-интегральный закон регулирования (ПИ регулятор), вспомогательный регулятор реализует пропорциональный закон регулирования (П регулятор). Рис. 3. Структурная схема каскадной системы регулирования. 3.1. Полагая, что основной регулятор отключён, и используя передаточную функцию Y1(s)/U(s), полученную в п. 1.2, определить коэффициент усиления вспомогательного П-регулятора, обеспечивающий запас устойчивости внутреннего контура по амплитуде 50 %. Полученное значение коэффициента усиления вспомогательного П регулятора использовать при выполнении следующих заданий. 3.2. Для нескольких значений (2..4) каждого параметра настройки основного ПИ регулятора определить реакцию системы регулирования: 3.2.1. на задающее воздействие yзд(τ) = 1(τ) [d1(τ) = d2(τ) = 0]; 3.2.2. на возмущающее воздействие d1(τ) = 1(τ) [yзд(τ) = d2(τ) = 0]; 3.2.3. на возмущающее воздействие d2(τ) = 1(τ) [yзд(τ) = d1(τ) = 0]. 3.3. По переходным характеристикам каскадной САР определить показатели качества регулирования, сравнить с соответствующими показателями одноконтурной САР и сделать вывод о целесообразности применения каскадной САР для регулирования данного объекта.