1111
реклама

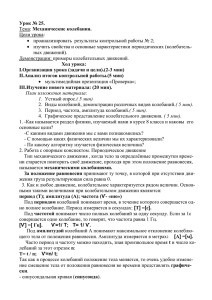
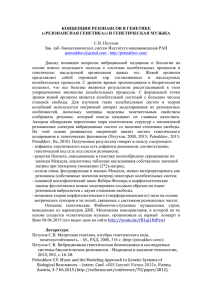
УДК 534.1:681.5 ПАРАМЕТРИЧЕСКАЯ ИДЕНТИФИКАЦИЯ НЕЛИНЕЙНЫХ КОЛЕБАТЕЛЬНЫХ СИСТЕМ И.Д.Пузько, доц.; В.А.Хворост, доц. 1 ПОСТАНОВКА ЗАДАЧИ При эксплуатации резонансных виброиспытательных систем возникает частная задача определения инерционно-жесткостных параметров нелинейных колебательных систем и резонансных частот линейных порождающих колебательных систем [1,2]. Постановка и решение такого класса задач выполняется в [3], где предложены теоретические методы идентификации, основанные на введении специально сконструированных весовых функций. В [4] предложен способ, основанный на применении метода преобразующего оператора, в [2] описаны способы оценки параметров некоторых механических систем по экспериментальным частотным характеристикам и временным данным. Алгоритмы идентификации, рассмотренные в [2,3,4], мало применимы при решении задач экспресс-анализа. Рассмотрим более простой при технической реализации алгоритм параметрической идентификации, основанный на реализации режимов свободных колебаний. 2 АЛГОРИТМ РЕШЕНИЯ ЗАДАЧИ И ОСНОВНЫЕ РЕЗУЛЬТАТЫ Для модели в виде нелинейной консервативной колебательной системы, динамика которой описывается уравнением d 2 y dt 2 02 y 2 y 3 0, (1) где 02 ñ1 / m, 2 c3 / m, c1 0, c3 0, (2) при решении y(t)=Yasinwt из (1) следует [5,6] 2 02 1 3ñ3 Ya2 4c1 . (3) Скелетная кривая (3) содержит информацию о параметрах m, с1, с2, для определения которых реализуются режимы свободных колебаний системы (1) для двух значений начальных амплитуд Ya1,Ya2. Из (3) получим систему уравнений 1 3ñ3 Ya22 4c1 . 12 02 1 3ñ3 Ya21 4c1 , 22 02 (4) Решая эту систему относительно w0 и 3с3/4с1, получим: 0 1 2 Ya21 21 Ya22 22 Ya21 Ya22 2 , 1 3c3 4c1 22 21 Y 2 2 a1 1 Ya22 22 , (5) (6) где 1 1 , 2 2 . (7) Принимая во внимание (2), запишем 02 ñ1 m m* . Из (2) и (8) следует m m* где 0 1 , 2 0 (8) (9) 0 1 2 Ya21 21 Ya22 22 1 1 , Ya21 Ya22 1 2 , (10) 2 2 , Ya1 , Ya2 - значения начальных амплитуд для системы (1) с массой m+m* ; m* - пробная масса; 1 , 2 - частоты свободных колебаний системы (1), соответствующие значениям начальных амплитуд Ya1 , Ya2 . Таким образом, параметр m определяется из (9) при учете (5),(10). Коэффициент с1 определяется из (2) при учете (5),(9),(10): 02 02 . c1 m02 m* (12) Из (6) при учете (12) получим выражение для коэффициента с3: ñ3 4c1 22 21 При условии Ya1 Ya1 , m m* 1 2 3Y 2 2 a1 1 Ya22 22 . (13) Ya2 Ya2 (9), (12), (13) принимают вид: 2 Ya2121 Ya22 22 12 2 Ya2121 Ya22 22 2 2 Y Y 1 , (14) c1 2 m* Ya21 21 Ya22 22 Ya21 21 Ya22 22 2 2 Ya1 Ya2 2 a1 1 1 2 2 2 2 a2 2 2 2 2 1 21 , 3Ya21 Ya22 2 2 Ya1 1 1 22 22 Ya2 2 2 21 21 . (15) c3 4 2 m* 22 21 Ya21 21 Ya22 22 (16) . 3 РЕЗУЛЬТАТЫ КОМПЬЮТЕРНОГО МОДЕЛИРОВАНИЯ Проведено компьютерное моделирование режима свободных колебаний модели (1) с помощью системы ПА-7 [7]. Модель описывалась нелинейным дифференциальным уравнением Рисунок 1 - Временная диаграмма перемещения y(t)=Yasinwt: a) m=1, Ya=0,2; б) m=1;Ya=0,1; в) m=2, Ya=0,2; г) m=2; Ya=0,1 d 2 y dt 2 104 y 106 y3 0 . (17) Результаты моделирования приведены на рис.1. При начальных условиях Ya1 =0,2; Ya2=0,1 из рис.1 получим: 1=1,59 10-2, 1 =2,2510-2, 2=2,39 10-2, 2 =3,3810-2. Определим значения параметров по формулам (5), (14), (15), (16): 0=100,31, 0 =71,06, m=1,007, c1=1,0135104, c3=0,97106. Относительные погрешности равны: 0 0,3%; m 0,7%, c1 135 , %, c3 3%. ВЫВОДЫ 1 Результаты компьютерного моделирования позволяют сделать вывод о приемлемых для практических применений величинах погрешностей определения параметров по предложенной методике. 2 Реализация, по крайней мере, двух режимов свободных колебаний для моделей в виде нелинейных консервативных колебательных систем позволяет определить резонансные частоты линейных порождающих колебательных систем и инерционно-жесткостные параметры нелинейных колебательных систем при регистрации начальных значений амплитуд и частот. SUMMARY The algorithm for parametric identification of models of the non-linear conservative oscillatory systems has been proposed. This algorithm is based on application of at least two free oscillation modes practiced to register the initial values of frequencies and amplitudes. The analysis has been made and the relationships between inertia-rigidity parameters used to model non-linear conservative oscillatory systems and resonant frequencies in linear oscillatory systems models have been calculated. СПИСОК ЛИТЕРАТУРЫ 1. Божко А.Е. и др. Резонансные виброиспытательные системы.-К.: Наук. думка, 1992.-248 с. 2. Редько С.Ф., Ушкалов В.Ф., Яковлев В.П. Идентификация механических систем.-К.: Наук. думка, 1985.- 216 с. 3. Плахтиенко Н.П. Метод специальных весовых функций в задачах параметрической идентификации нелинейных механических систем. - ДАН УССР, Сер.А, 1983, №8.-С.30-35. 4. Янг П.К. Метод параметрической оценки адаптивного управления. В кн.: Теория самонастраивающихся систем управления. - М.: Наука, 1969.-С.123-143. 5. Божко А.Е. и др. Динамико-энергетические связи колебательных систем.-К.: Наук. думка, 1980.-188 с. 6. Быховский И.И. Основы теории вибрационной техники. - М.: Машиностроение, 1969.- 364 с. Поступила в редколлегию 23 ноября 1995 г.