Лабораторные работы 5
реклама

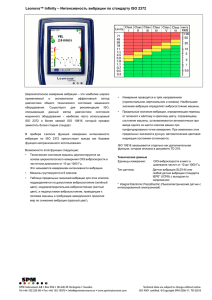
Лабораторные работы 5-6 (4 часа) Тема: Диагностика асинхронных двигателей с помощью индукционных вибродатчиков. Цель работы: приобретение знаний студентами о явлении «вибрация», а также получения навыков работы с виброанализатором и обработки экспериментальных данных. Общие сведения Вибрация – это механические колебания тела. Самый простой вид вибрации – это колебание или повторяющееся движение объекта около положения равновесия. Этот тип вибрации называется общей вибрацией, потому что тело перемещается как единое целое и все его части имеют одинаковую по величине и направлению скорость. Положением равновесия называют такое положение, в котором тело находится в состоянии покоя или положение которое оно займет, если сумма действующих на него сил равна нулю. Колебательное движение твердого тела может быть полностью описано в виде комбинации шести простейших типов движения: поступательного в трех взаимно перпендикулярных направлениях (х, у, z в декартовых координатах) и вращательного относительно трех взаимно перпендикулярных осей (Ох, Оу, Оz). Любое сложное перемещение тела можно разложить на эти шесть составляющих. Поэтому о таких телах говорят, что они имеют шесть степеней свободы. Самыми простыми из существующих в природе колебательных прямолинейные колебания тела на пружине (рис. 1). 1 движений являются упругие Рис. 1. Простейшее колебание Такая механическая система обладает одной степенью свободы. На рис.1 представлен также график зависимости перемещения тела от времени. Если бы в системе отсутствовало трение, то эти колебания продолжались бы непрерывно и бесконечно долго с постоянными амплитудой и частотой. В реальных механических системах такие идеальные гармонические движения не встречаются. Любая реальная система обладает трением, которое приводит к постепенному затуханию амплитуды и превращает энергию колебаний в тепло. Период – это интервал времени, который необходим для завершения одного цикла колебания, то есть это время между двумя последовательными моментами пересечения нулевой точки в одном направлении [5]. В зависимости от быстроты колебаний, период измеряют в секундах или миллисекундах. Частота колебаний – величина обратная периоду, определяет количество циклов колебания за период, она измеряется в герцах (1 Гц = 1/секунду) [4]. Когда рассматриваются вращающиеся машины, то частота основного колебания соответствует частоте вращения, которая измеряется в об/мин (1/мин) и определяется уравнением (1): f 60 (об/мин), (1) f – частота в Гц, т.к. в минуте 60 секунд. Уравнения колебаний Если по вертикальной оси графика отложить положение (смещение) объекта, испытывающего простые гармонические колебания, а по горизонтальной шкале – время как показано на рис.1, то результатом будет синусоида [7], описываемая уравнением (2): d D sin( t ) , где d – мгновенное смещение, 2 (2) D – максимальное смещение, ω = 2πF – угловая (циклическая) частота. В теории вибраций синусоидальная волна также является функцией времени, однако один цикл колебания иногда рассматривают также как изменение фазы на 360 градусов. Упомянутая выше скорость движения определяет быстроту изменения положения тела. Скорость (или быстрота) изменения некоторой величины относительно времени, как известно из математики, определяется производной по времени [7] v dd / dt D cos( t ) , (3) n – мгновенная скорость. Из этой формулы видно, что скорость при гармоническом колебании также ведет себя по синусоидальному закону, однако, вследствие дифференцирования и превращения синуса в косинус, скорость сдвинута по фазе на 90 (то есть на четверть цикла) относительно смещения. Ускорение – это скорость изменения скорости [6], a dv / dt 2 D sin( t ) , (4) n – мгновенная скорость. Следует отметить, что ускорение сдвинуто по фазе еще на 90 градусов, на что указывает отрицательный минус (то есть на 180 градусов относительно смещения). Из приведенных уравнений видно, что скорость пропорциональна смещению, умноженному на частоту, а ускорение – смещению, умноженному на квадрат частоты. Это означает, что большие смещения на высоких частотах должны сопровождаться очень большими скоростями и чрезвычайно большими ускорениями. Измерения амплитуды вибрации Для описания и измерения механических вибраций используются следующие понятия (рис. 2): 3 - максимальная амплитуда (пик) – это максимальное отклонение от нулевой точки, или от положения равновесия [23]; - размах (пик-пик) – это разница между положительным и отрицательным пиками. Для синусоидального колебания размах в точности равен удвоенной пиковой амплитуде, так как временная реализация в этом случае симметрична [23]; Рис. 2. Амплитуда вибрации Среднеквадратическое значение амплитуды (СКЗ) равно квадратному корню из среднего квадрата амплитуды колебания. Для синусоидальной волны СКЗ в 1,41 раза меньше пикового значение, однако такое соотношение справедливо только для данного случая [23]. СКЗ является важной характеристикой амплитуды вибрации. Для ее расчета необходимо возвести в квадрат мгновенные значения амплитуды колебаний и усреднить получившиеся величины по времени. Для получения правильного значения, интервал усреднения должен быть не меньше одного периода колебания (рис. 3). После этого извлекается квадратный корень и получается СКЗ. Рис. 3. Среднеквадратичное значение амплитуды 4 СКЗ должно применяться во всех расчетах, энергии колебания. Например, относящихся к мощности и сеть переменного тока 117 В (речь идет о северо- американском стандарте). 117 В – это среднеквадратичное значение напряжения, которое применяется для расчета мощности (Вт), потребляемой включенными в сеть приборами. Напомним еще раз, что для синусоидального сигнала (и только для него) среднеквадратичная амплитуда равна 0,707 х пик. Понятие фазы Фаза есть мера относительного сдвига во времени двух синусоидальных колебаний [15]. Хотя по своей природе фаза является временной разностью, ее почти всегда измеряют в угловых единицах (градусах или радианах), которые представляют собой доли цикла колебания и, следовательно, не зависят от точного значения его периода (рис. 4). Рис. 4. Понятие фазы Разность фаз двух колебаний часто называют сдвигом фазы. Сдвиг фазы в 360 градусов представляет собой временную задержку на один цикл, или на один период, что, по существу, означает полную синхронность колебаний. Разность фаз в 90 градусов соответствует сдвигу колебаний на ¼ цикла друг относительно друга и т.д. Сдвиг фазы может быть положительным либо отрицательным, то есть одна временная реализация может отставать от другой или, наоборот, опережать ее. 5 Фазу можно также измерять по отношению к конкретному моменту времени. Примером этого является фаза дисбалансовой компоненты ротора (тяжелого места), взятая относительно положения какой-то его фиксированной точки (рис. 5). Для измерения этой величины необходимо сформировать прямоугольный импульс, соответствующий определенной опорной точке на валу. Этот импульс может генерироваться тахометром или любым другим магнитным или оптическим датчиком, чувствительным к геометрическим или световым неоднородностям на роторе, и называется иногда тахоимпульсом. Измеряя задержку (опережение) между циклической последовательностью тахоимпульсов и вибрацией, вызванной дисбалансом, мы тем самым определяем и их фазовый угол. Рис. 5. Дисбалансовая компонента ротора Фазовый угол может измеряться относительно опорной точки как в направлении вращения, так и в направлении, противоположном вращению, т.е. либо как фазовая задержка, либо как фазовое опережение. Различные производители оборудования используют как тот, так и другой подходы. Вибрация машины – это, фактически отклик на силы, вызванные ее движущимися частями [17]. Мы измеряем вибрацию в разных точках машины и находим значения сил. Измеряя частоту вибрации, мы предполагаем, что и вызывающие ее силы имеют те же частоты, а ее амплитуда пропорциональна величине этих сил (рис. 6). То есть мы предполагаем, что машина является линейной системой. В большинстве случаев такое предположение разумно. 6 Рис. 6. Вибрации закрепленного двигателя Однако по мере того, как машина изнашивается, увеличиваются ее зазоры, появляются трещины и разболтанность и т.д., ее отклик будет все больше отклоняться от линейного закона, и в результате характер измеряемой вибрации может стать совершенно отличным от характера возбуждающих сил. Например, несбалансированный ротор воздействует на подшипник с синусоидальной силой на частоте 1Х, и других частот в этом возбуждении нет. Если механическая структура машины нелинейная, то возбуждающая синусоидальная сила будет искажена, и в результирующем спектре вибрации помимо частоты 1Х появятся ее гармоники. Количество гармоник в спектре и их амплитуда являются мерой нелинейности машины. Например, по мере износа подшипника скольжения в спектре его вибрации возрастает количество гармоник и увеличиваются их амплитуда. Гибкие соединения с несоосностью являются нелинейными. Именно поэтому их вибрационные характеристики содержат сильную вторую гармонику оборотной частоты (то есть 2Х). Износ муфты с несоосностью часто сопровождается сильной третьей гармоникой оборотной частоты (ЗХ). Когда силы с разными частотами взаимодействуют внутри машины нелинейным образом, возникает модуляция, и в спектре вибрации появятся новые частоты. Эти новые частоты, или боковые полосы. присутствуют в спектрах дефектных зубчатых передач, подшипников качения и т.д. Если зубчатое колесо имеет эксцентриситет или какую-то неправильную форму, то оборотная частота будет модулировать частоту зацепления зубьев, приводя к боковым полосам в спектре вибрации. Модуляция – это всегда нелинейный процесс, при котором появляются новые частоты, отсутствовавшие в возбуждающей силе. 7 18. Частотный анализ Обратите внимание, что на приведенном рис. 7, частотные составляющие сигнала отделены друг от друга и явно выражены в спектре, а их уровни легко дентифицировать. Эту информацию было бы очень непросто выделить из временной реализации. Рис. 7. Частотный анализ На рис. 8 видно, что события, перекрывающиеся друг с другом во временной области разделяются в частотной области на отдельные компоненты. Рис. 8. Временное и частотное представление Временная реализация вибрации несет в себе большое количество информации, которая для невооруженного глаза незаметна. Часть этой информации может приходиться на очень слабые компоненты, величина которых может быть меньше, чем толщина линии графика. Тем не менее подобные слабые компоненты могут быть важны для выявления развивающихся неисправностей в машине, например, дефектов 8 подшипников. Сама суть диагностики и обслуживания по состоянию, заключается а раннем обнаружении зарождающихся неисправностей, поэтому, необходимо обращать внимание и на чрезвычайно малые уровни вибрационного сигнала. На приведенном спектре (рис. 9) очень слабая компонента представляет небольшую развивающуюся неисправность в подшипнике, и она осталась бы незамеченной, если бы мы анализировали сигнал во временной области, то есть ориентировались на общий уровень вибрации. Поскольку СКЗ - это просто общий уровень колебания в широком частотном диапазоне, поэтому небольшое возмущение на подшипниковой частоте может остаться незамеченным в изменении уровня СКЗ, хотя для диагностики это возмущение очень важно. Рис. 9. Спектр вибрации Прежде чем приступить к процедуре выполнения спектрального анализа давайте взглянем на различные типы сигналов, с которыми нам предстоит работать рис. 10. Рис. 10. Сигналы 9 С теоретической и практической точек зрения можно разделить сигналы на несколько групп. Различным типам сигналов соответствуют различные типы спектров, и во избежание ошибок при выполнении частотного анализа, важно знать характеристики этих спектров. Временная реализация вибрации (рис. 11) электрической машины служит для определения силы с которой действует электрическая машина на опору (необходима для расчета фундамента для электрической машины): F m a. (5) Выявления резких пиковых виброускорений которые могут служить сигналом к отключению для электрической машины систем автоматизации. Определение перемещения электрического двигателя за промежуток времени от положения равновесия служит для расчета люфта крепежа конструкции (или его мягкости): at 2 x x 0 V0 t . 2 Рис. 11. Временная реализация процесса вибрации 10 (6) Общая вибрация электрического двигателя состоит из множества вибраций отдельных узлов электрической машины: таких как вибрации в роторе, в подшипниках, вибрации вызванные электромагнитными причинами и т.д. Для выявления данных дефектов служит спектральный анализ вибрации электрической машины (рис. 12). Рис. 12. Частотная характеристика процесса вибрации Общая вибрация электрической машины состоит из множества вибраций (гармоник) с различными частотами, что показано на рис. 13. х 0,1 Гц у 0,58 0,24 0,24 Гц 0,58 1 с 0,001 с - 100 100 Гц х Гц х = 0,1 Гц Рис. 13. Гармоники вибрации на частоте 100 Гц по двум осям 11 По спектру вибрационного процесса путем сравнительного анализа возможно определить неисправности в электрической машине. Графики спектров электрических машин с заранее известными дефектами показаны в табл. 1. Таблица 1 Частотные реализации электрических машин с дефектами Тип вибрции Спектр вибрации 1 2 а) вибрация ротора с небалансом; б) агрегат с ослаблением крепления к фундаменту и расцентровкой; в) Ослабление посадки элементов на валу; г) увеличенный зазор в подшипнике скольжения; 12 д) подшипник скольжения с масляной субгармоникой; е) спектр вибрации зубчатой пары, находящейся в нормальном состоянии; Продолжение табл. 2 1 2 ж) спектр вибрации зубчатой пары с дефектом на выходном валу; з) спектр зубчатой передачи с дефектом на выходном валу; и) спектр вибрации зубчатой пары с дефектом подшипника скольжения; 13 к) спектр вибрации зубчатой пары, расцентрованной с приводнымем двигателем; л) временной сигнал вибрации зубчатой пары с развитым дефектом одного зуба входного вала; Продолжение табл. 2 1 2 м) спектр вибрации агрегата с 4-х пальцевой соединительной муфтой, имеющей перекос венцов; 14 н) спектр вибрации агрегата с угловой расцентровкой; о) спектр вибрации агрегата с паралелльной расцентровкой; Продолжение табл. 2 1 2 15 п) спектр вибрации агрегата с расцентровкой и износом муфты; р) спектр вибрации агрегата с задеванием ротора об уплотнение; с) временной сигнал вибрации ротора; т) временной сигнал вибрации подшипника с дефектом; у) спектр вибрации на начальной стадии диагностики дефекта подшипника качения; Продолжение табл. 2 1 2 16 ф) спектр вибрации на второй стадии диагностики дефекта подшипника качения; х) спектр вибрации на третьей стадии диагностики дефекта подшипника качения; ц) спектр вибрации агрегата с ослаблением фундамента; ч) спектр огибающей вибросигнала подшипника качения с раковиной на наружном кольце; ш) спектр огибающей подшипника с раковиной на внутреннем кольце; э) спектр вибрации при наличие дефектов статора; Продолжение табл. 2 17 1 2 ю) спектр вибрации при наличии эксцентриситета статора; я) спектр вибрации в осевом направлении при дефекте осевого монтажа; а1) спектр вибрации при эксцентриситете ротора; а2) спектр вибрации при наличии отгоревших стержней в беличьей клетке ротора; а3) спектр вибрации при наличии дефектов зубцово – пазовой структуры Описание элементов микросхем лабораторной установки проведения анализа вибрации 18 Прибор для измерения виброускорения состоит из двух частей: датчика и устройства сопряжения с ПК (рис. 14-16). В качестве датчика используется акселерометр ADXL210 предназначенный для измерения ускорения по двум осям (X и Y) в динамическом диапазоне ±10G. Результат измерения снимается с двух дифференцированных выходов Xout и Yout в виде последовательности импульсов, период следования которых задается сопротивлением Rset. Длительность импульсов на выходах Xout и Yout пропорциональна величинам ускорений по соответствующим осям. Конденсаторы Сх и Су служат в качестве фильтров нижних частот. Устройство сопряжения состоит из микроконтроллера DD1 и преобразователя уровней напряжения DA1. Измерение длительности импульсов поступающих с выходов Xout и Yout акселерометра на входы микроконтроллера DD1 производится путем подсчета таймером/счетчиком тактовых импульсов. Выходы Xout и Yout акселерометра соединены со входами внешних прерываний IntO и Intl микроконтроллера. При появлении положительных фронтов на входах IntO и Intl микроконтроллера происходит прерывание в результате, которого включается таймер/счетчик и начинает подсчет тактовых импульсов микроконтроллера. Таймер/счетчик останавливается по заднему фронту импульсов. Затем содержимое счетного регистра сохраняется в оперативной памяти микроконтроллера, счетный регистр сбрасывается и микроконтроллер ожидает появления следующего положительного фронта. После проведения серии измерений результаты передаются на ПК по интерфейсу RS-232. Так как, частота тактового генератора микроконтроллера значительно больше частоты следования импульсов с выходов акселерометра, то каждый результат измерения занимает два байта в оперативной памяти. Тактовый сигнал микроконтроллера задается кварцевым резонатором ZQ1 с номинальной частотой 7372800 Гц. Такая частота необходима для точной установки скорости передачи данных по интерфейсу RS-232. Передача данных производится на максимально возможной скорости 115200 бод. Микросхема DA1 необходима для преобразования уровней напряжения ТТЛ-логики на уровни напряжений интерфейса RS-232. 19 Питание всего устройства осуществляется с линий управления RTS и DTR СОМ-порта. При запуске приложения на линиях RTS и DTR, программно, устанавливается положительное напряжение (около 11 В). Стабилитрон VD3 служит для стабилизации напряжения на уровне 5,1 В. Резистор R1 для ограничения тока, а конденсатор С1 для сглаживания пульсаций. 20 Микросхемы лабораторной установки для проведения анализа вибрации Рис. 14. Микросхема устройства сопряжения лабораторной установки для проведения анализа вибрации 21 22 Рис. 15. Микросхема подключения датчика ускорения лабораторной установки для проведения анализа вибрации 23 Рис. 16. Микросхема датчика ускорения лабораторной установки для проведения анализа вибрации 24 25 Программы для работы микроконтроллеров и программное обеспечение Программа для микроконтроллера составлялась на языке программирования assembler, и была скомпилирована в шестнадцатеричный код. С помощью программатора микроконтроллер был запрограммирован. Программное обеспечение составлялось на языке программирования Delphi. Данная программа будет работать в среде Windows обращаясь к com – портам. Процесс измерения вибрации лабораторной установкой Измерение ускорения производится посредствам вычисления отношения длительности импульса Тх (Ту) к периоду следования импульсов Т. T 100% G x x 0,5 . T 4% (7) Измерение длительности импульсов и периода следования импульсов производится путем подсчета таймером-счетчиком тактовых импульсов микроконтроллера в течении времени между перепадами фронтов импульсных последовательностей, поступающих с двух выходов датчика на входы микроконтроллера. Как показано на рис. 17 минимальная длительность импульса равна Т/10, что соответствует ускорению -10g, а максимальная длительность 9Т/10 соответствует ускорению +10g. При ускорении 0g длительность импульса равна Т/2. 26 Т=340 мкс Тх min=T/10 Gx= -10g Tx max=9T/10 Gx= 10g Tx=T/2 Gx= 0g Рис. 17. Связь между длительностью импульсов и ускорением Выбор режима измерения и отображение результатов измерений осуществляется в Windows – приложении которое поддерживает связь между ПК и адаптером, к которому подключается датчик. Измерения можно производить серией по 250 выборок Тх и Ту, значения которых сохраняются в течение периода следующего за периодом измерения. После 250-ти измерений сохраненные значения пакетом передаются на ПК. После получения пакета выборок можно произвести расчет спектра вибрации. Временная диаграмма процесса измерения-сохранения показана на рис. 18. Измерение Запись результатов в память Следующее измерение G 1 период Gy Рис. 18. Временная диаграмма процесса измерения – сохранения 27 Для демонстрации имеется также возможность проведения динамических измерений (рис. 19). В этом режиме значения Тх и Ту непосредственно передаются на ПК с последующим отображением на графике, после чего производится следующее измерение. В этом режиме число периодов следования импульсов между измерениями вычисляется в зависимости от мощности ПК. измерение Передача результатов на ПК и отображение на графике Следующее измерение Gx N периодов Gy Рис. 19. Временная диаграмма процесса динамических измерений Описание интерфейса программы При запуске программы открывается окно с рабочими областями, а также функциями управления рис. 20 и рис. 21 описания которых приведены в табл. 2. При запуске программы необходимо активировать com-порт, к которому подключены плата сопряжения и датчик ускорения. 28 Рис. 20. Окно программы для временной реализации процесса вибрации Рис. 21. Окно программы для частотной характеристики вибрации Описание обозначений клавиш программы сведены в табл.2. 29 Таблица 2 Описание обозначения клавиш программы № Описание 1 Выход из программы с отключением питания соm1 порта 2 Выбор порта подключения виброанализатора 3 Старт измерения 4 Отображение графиков по двум осям 5 Отображение графика по оси х 6 Отображение графика по оси у 7 Динамический режим 8 Измерение за период времени 9 Свернуть окно программы 10 Полноэкранный режим 11 Закрытие окна программы 12 Временная реализация графика 13 Переход на график спектра 14 Открытие сохраненных данных 15 Сохранить данные измерения 16 Сохранить изображение графика («картинка»), использование векторной графики делает возможным увеличение изображения без потери качества и искажений 17 Скопировать в буфер обмена 18 Показать весь график по горизонтали 19 Показать весь график по вертикали 20 Таблица значений точек-измерений 21 Область постоения графика 22 Разделение графиков по цветам 23 Построение спектра 24 Прокрутка графика спектра (изменение масштаба) 30 25 График спектра целиком по горизонтали 26 График спектра целиком по вертикали Задание на выполнение лабораторной работы Изучение свойств процесса вибрации, ознакомление с виброанализатором, проведение измерений вибрации электрической машины, обработка полученной информации. Содержание отчета 1. Описание процесса вибрации и его параметры. 2. Построение временной реализации вибрации электрической машины по контрольным точкам (min, max, 0). 3. Определение силы действующей на крепление двигателя по двум осям (х, у). 4. Определение максимального значения виброускорения. 5. Определение отклонения двигателя от точки покоя в мм. 6. Построение частотной характеристики вибрации электрической машины по контрольным точкам. 7. Разложить спектр вибрации на составляющие гармоники вибраций по двум осям, учитывая сдвиг по фазе. 8. Определение неисправности электрической машины методом сравнения. Контрольные вопросы 1. Для чего служит вибродиагностика электрических машин? 2. Какие параметры возможно выявить по временной реализации вибрации электрической машины? 3. Какие параметры возможно выявить по частотной реализации вибрации электрической машины? 4. Каким методом выявляются дефекты в электрической машине? 5. Для чего служит метод тест-удар? 6. Параметры процесса вибрации. 31 Литература а) основная литература: 1. Зимняков С.А., Козлов В. К.; Муратаева Г. А., Муратаев И. А. Диагностика электрооборудования электрических сетей и подстанций: учебное пособие. Казань: КГЭУ, 2013. 112 с. 2. Валиуллина Д. М., Гарифуллин М.Ш., Козлов В.К. Диагностика маслонаполненного электрооборудования подстанций: учебное пособие М. Ш. Гарифуллин, В. К. Козлов. - Казань: КГЭУ, 2005. 116 с. б) дополнительная литература: 3. Роженцова Н.В. Ларионова А. М.; Ларионов С. Н.. Вагапов Г. В. Диагностика электрооборудования промышленных предприятий: метод. указания к лабор. работам. Казань: КГЭУ, 2011. 31 с. 4.Баранов А.В. Надежность и диагностика технологических систем. Рыбинск: РГАТА, 2006. 138 с. 5.Правила эксплуатации электроустановок Энергоатомиздат, 2002. в) программное обеспечение и Интернет-ресурсы: 6. http: // window.edu. ru/ window/ library 7. http: // nehudlit. ru/ 8. http: // www.tehlit. ru/ 9. http://elektroinf.narod.ru/ 10. http://www.electromonter.info/ 32 потребителей. М.: