Разработка модели следящего электропривода блока
реклама

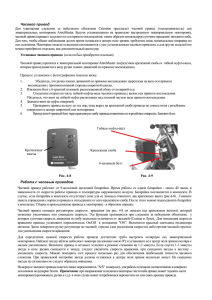
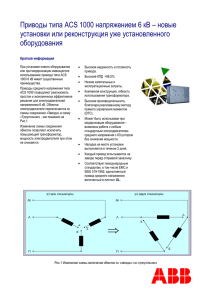
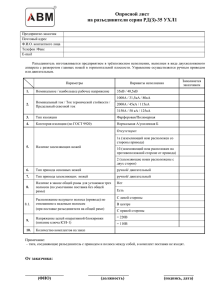
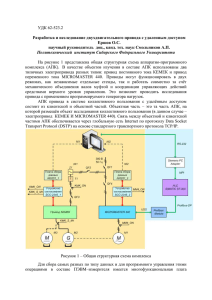
преподаватель Храмов Ю.К. ГБОУ РМ СПО «Саранский техникум энергетики и электронной техники им. А.И. Полежаева» Разработка модели следящего электропривода блока бесперебойного питания для электрических подстанций с использованием солнечных батарей и гелиоконцентратора Введение В настоящее время тема получения альтернативных источников энергии актуальна. Поэтому в ближайщее время использование солнечных батарей во всех отраслях техники,в том числе и в энергетике будет увеличиваться. Данная работа является составной частью конструкторской работы по созданию следящего привода системы Солнечная батарея-Солнце. Гелиоконцентратор Эта система должна отслеживать движение Солнца так , чтобы световой поток ,падающий на солнечную батарею был максимальным 1.Разработка следящего электропривода для энергоблоков солнечного питания При выполнении данной работы были поставлены следующие задачи; 1. Выбрать и расчитать сельсинную схему следящего привода 2. Разработать конструкцию опытного образца 3. Изготовлена конструкция опытного образца 4. Реализация функционального блока с гелиоконцентра 2.Методика и материалы исследования Поставленная задача состоит в том ,что бы схема автоматика отслеживала положение источника света ,в данном случае источника солнечной энергии. При анализе схем электроприводов в качестве электропривода рассматривались следующие варианты: 1.Релейный следящий электропривод 2.Импульсный следящий электропривод 3.Следящий привод с шаговым двигателя 4. Цифровой следящий электропривод 5.Следящий привод с магнесином следящего 3 Собственные данные исследования. Выбор конструктивного решения 4 Разработка схемы отслеживания по экстремуму В качестве следящей схемы использовалась схема на сдвоенном операционном усилителе Данная схема является универсальной дифференциальной схемой для следящего привода по максимуму сигнала .Сущность метода заключается в том , что максимум сигнала наблюдается при равенстве сигналов с двух симметричных фотодатчиков. Если один выходной сигнал больше другого то на выходе операционных усилителей вырабатывается сигнал разных уровней Эта разность позволяет получить питающее напряжение на двигатель постоянного тока,и в зависимости от полярности двигатель вращается по часовой или против часовой стрелки Таким образом после нескольких переключений блок повернется таким образом ,чтобы освещенность была максимальной. Аналогично эта схема может работать с другими датчиками 5 Разработка сельсинного привода Учитывая характеристики щадящие (Точность допустимые статические позиционирования) и выбираем динамические за основу сельсинный привод в индикаторном режиме Начальным вариантом предложен сельсинный привод в индикаторном режиме. Была предложена следующая схема сельсина. При повороте валана угол сельсин-датчиком (СД) вырабатывает соответствующий этому углу сигнал, который передается по линии связи (ЛС) на сельсин-приёмник (СП/), где преобразуется в угловое перемещение ротора СП на угол.. Если роторы сельсинов СДи СП занимают одинаковое положение относительно собственных обмоток возбуждения (0В), то в обмотках фаз синхронизации этих сельсинов наводятся ЭДС: ЕАД=ЕАП, ЕВД=ЕВП, ЕСД=ЕСП. В этом случае разность ЭДС в цепи одноименных фаз обмотки синхронизации равна нулю, так в ЛС (IA = 0, IВ = 0, IС = 0) и система находиться в равновесии. Если же ротор СД сдвинется на угол Д, а ротор СП останется в прежнем положении (П = 0), то появиться угол рассогласования : = Д – П и нарушиться равновесие ЭДС в цепи синхронизации, т.е. ЕАДЕАП, ЕВДЕВП, ЕСДЕСП. А так как одноименные фазы обмотки синхронизации Д и П включены встречно, то в цепи этих обмоток появиться результирующая ЭДС Е, под действием которой в обмотках синхронизации Д и П появятся уравнительные токи: IA = ЕА/Z, IВ = ЕВ/Z, IС = ЕС/Z, где Z – суммарное сопротивление току синхронизации Z = ZД + ZП + ZЛ. Эти токи, проходят по виткам фаз обмотки синхронизации, создают магнитодвижущие силы в Д и П. Поперечные составляющие МДС Fдq и Fпq взаимодействуют с магнитными потоками возбуждения и создают в Д и П вращающие синхронизирующие моменты Мсд и Мсп. Т.е. индикаторная система дистанционной передачи угла является само синхронизирующей. Рис.1. Индикаторная система дистанционной передачи угла. В дальнейшем планируется создать трансформаторную систему дистанционной передачиугла, которая используется для передачи угла поворота на вал рабочего механизма, когда необходим значительный вращающий момент. Заключение При выполнении данной работы была проделана следующая работа: 5. Проведен анализ схем автоматики следящего привода 6. Выбрана и расчитанасельсинная схема следящего привода 7. Разработана конструкция опытного образца 8. Изготовлена конструкция опытного образца 9. Намечены дальнейшие шаги реализации данного проекта . «Литература» 1Белов М.П. Автоматизированный электропривод .Москва; Изд. Центр «Академия» 2012 г..2Белянин П.Н. Гибкие производственные системы. Москва ; Издательство «Машиностроение» 2008 г. 3Андреев В.М. Фотоэлектрические преобразователи концентрированного электрического излучения. Москва ; Издательство «Наука» 2013 4.Гаврилин В.И. Введение в энергосбережение (учебное пособие) Москва ; Издательский центр «Академия» 2012г. 5 Техническая документация на блоки бесперебойного питания ЗАО Конвертор