УДК 004.8+338.43 АЛГОРИТМ ПЛАСТИЧНОГО СУБСТРАТНОГО ОНТОНЕЙРОМОРФОГЕНЕЗА ДЛЯ
advertisement

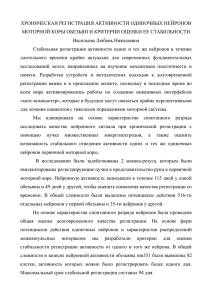
УДК 004.8+338.43 АЛГОРИТМ ПЛАСТИЧНОГО СУБСТРАТНОГО ОНТОНЕЙРОМОРФОГЕНЕЗА ДЛЯ ПРОАКТИВНОГО ВИРТУАЛЬНОГО АГЕНТА З. В. Нагоев Институт информатики и проблем регионального управления Кабардино-Балкарского научного центра РАН Введение В последнее время в искусственном интеллекте активно развивается направление «Адаптивное поведение» (Adaptive Behavior). Основной подход этого направления – конструирование и исследование искусственных (в виде программы или робота) «организмов» (анимат, агент), способных приспосабливаться к внешней среде [3]. Основные результаты в этой области получены в нескольких мировых лабораториях – AnimatLab во Франции, Институт нейронаук Дж.Эдельмана, Институт оптико-нейронных технологий РАН, Институт прикладной математики им. М.В. Келдыша РАН. Эти результаты методологически основываются на двух наиболее важных психофизиологических теориях высшей нервной деятельности - теория отбора нейронных групп (нейродарвинизм) и теория функциональных систем П.К.Анохина. Интеллектуальные системы управления аниматов, как правило, имеют нейросетевую архитектуру, основным механизмом обучения которой являются схемы обучения без учителя. В этой связи особую значимость приобретают гипотезы и модели нейропластичности, как важнейшего механизма онтологического нейроморфогенеза (онтонейроморфогенеза). В данном исследовании предпринимается попытка разработать модель пластичного онтонейроморфогенеза на основе гипотетической схемы нейропластичности у позвоночных. В качестве основы мотивации интеллектуального поведения предлагается рассматривать, т.н., биоэнергию - меру способности агента активно воздействовать на среду. В частности, разработан алгоритм онтонейроморфогенеза, основанный на идее использования модели нейроглиального субстрата как контейнера нейромедиаторов, задающих направление и интенсивность роста нейронного дерева. 1. Некоторые концепции и модели нейроморфогенеза 1.1. Теория функциональных систем (П.К. Анохин) В функциональной системе результат представляет ее органическую часть, оказывающую решающее влияние, как на ход ее формирования, так и на все ее последующие реорганизации (проактивность). Системой [1] можно назвать только такой комплекс избирательно вовлеченных компонентов, у которых взаимодействие и взаимоотношения принимают характер взаимосодействия нейронных компонентов на получение полезного результата. Нейроморфогенез детерминирован потребностями нейронов в метаболитах, удовлетворяемых за счет пищевых связей в рамках функциональной системы[1]. 1.2. Теория отбора групп нейронов или нейродарвинизм С точки зрения Дж. Эделмана, фиксация опыта индивида происходит путем конкурентного отбора групп нейронов и синапсов, закономерности которого подобны закономерностям естественного отбора в эволюционирующих популяциях [3]. Между группами нейронов устанавливаются связи на конкурентной основе. В основе событий отбора лежит пространственно-временная координация активности нейронов. Такая координация достигается за счет процессов "повторного ввода" (reentry). Этот процесс Эдельман определяет как "динамический рекурсивный обмен сигналами через массивные параллельные аксональные системы, которые реципрокно связывают карты и ядра в мозгу". В результате селекции групп нейронов в коре формируются иерархически организованные системы, распознающие определенные сочетания сигналов - зрительные карты, слуховые карты, глобальные карты и т.д. Процесс ассоциации стимулов, приводящий к образованию "карт", соответствует процессу категоризации стимулов, поступающих из внешнего мира в сочетании с сигналами от внутренней среды организма. 1.4. Darwin X, Darwin XI Darwin X (рис. 1) представляет собой сухопутную версию водного лабиринта MORRIS. Это обычный тест пространственной памяти у грызунов. В этой задаче BBD (Brain-Based Device) было разрешено исследовать открытую площадку с видимыми метками на границе. Darwin должен был найти скрытую платформу, которая может быть обнаружена при приближении или касании. Скрытая площадка была размещена в лабиринте. Менее чем за 20 попыток Darwin X мог расположиться над скрытой платформой от любой стартовой позиции в лабиринте. Нейронные модули моделировали гиппокамп. Анализ моделирования показывает, что трехсинаптические пути наиболее преобладают в производящем месте активной области в испытаниях в начале обучения, но менее превалирует, когда BBD набирает опыт. Рис.1. Darwin X Darwin XI (рис. 2) был создан для исследования и объединения множества разных видов сенсорной информации в единую память. В Darwin XI были добавлены 2 новых сенсорных устройства по сравнению с Darwin X: - искусственные усы для исследования текстуры и - лазерный дальномер, который предоставляет информацию о расстоянии до препятствия. Darwin XI выполняет plus-maze задачу, которую применяют к грызунам для изучения зависимых перемещений. Рис. 2. Darwin XI 1.4. Лаборатория AnimatLab Проекты этой лаборатории, получившие широкую известность (MonaLysa, Kadamat, Robur, Kephera), на наш взгляд, заслуживают серьезного внимания. Аниматы представляют собой платформы для моделирования нервной системы адаптивных роботов. Они могут существовать и как модели организмов в виртуальной среде, и как настоящие роботы, которые можно снабдить моделью нервной системы, создаваемой на компьютере. В этих системах используются алгоритмы нейропластичности, которые совмещают нейроэволюцию и динамическое изменение топологии нейронной сети за счет добавления новых нейронов. 2. Постановка задачи В данной работе ставилась задача разработки общего алгоритма пластичного роста нервной системой анимата, состоящей из иерархических нейросетей. Алгоритм должен учитывать ситуативность и целенаправленность процессов нейроморфогенеза. 3. Субстратная гипотеза онтонейроморфогенеза Предлагаемая нами гипотеза онтонейроморфогенеза (ГО) основана на принципе биоэнергетической оптимальности мышления и поведения [2]. Рассмотрим гипотетический механизм формирования нейронной сети, реализующей нейропсихологическую функцию в соответствии с принципом биоэнергетической оптимальности. 3 Из внешней среды рецепторы получают сигналы. Эти сигналы от рецепторов поступают на входы нейросетей первого уровня (рис. 3). Когда выход нейросети срабатывает, он выбрасывает нейромедиаторы. Нейромедиаторы служат «маяком», показывающим в каком направлении нужно расти дендритам. Нейроглия служит питательной средой для дендритов и аксонов. Штриховыми аксонами и дендритами показаны возможные пути их роста. Рис. 3. Схема алгоритма пластичного проактивного субстратного онтонейроморфогенеза Повторное возбуждение (повторение) ситуаций-причин (на рисунке слева) и ситуаций-следствий (на рисунке справа) приводит к тому, что взаимонаправленный рост аксонов и дендритов происходит именно для тех пар ситуаций «причина-следствие», которые следует (с точки зрения биоэнергетической оптимальности) связать причинно-следственной зависимостью. Нейроглиальные клетки выделяют метаболиты пропорционально количеству разнотипных нейромедиаторов, накапливающихся в посттерминальных областях ситуаций-причин и ситуаций-следствий. Для целей алгоритма предполагается, что между нейромедиаторами посредством нейроглии устанавливаются дистантные взаимодействия, сходные с центральными полевыми силами (например, наподобие электростатических сил). Градиент наибольшего количества метаболитов, выделяемых нейроглиальными клетками, соответствует градиенту указанных полевых сил. Непосредственно рост невритов является, конечно, генетически детерминированы процессом, что также будет отражено в соответствующей имитационной модели. 4. Результаты Таким образом, в результате выполнения работы, был предложен алгоритм онтонейропластичности, обладающий свойствами ситуативности и целенаправленности. Алгоритм основан на идее введения в модель роста нейронного дерева нейроглиального субстрата, служащего контейнером и проводящей основой дистанционного взаимодействия разнотипных нейромедиаторов, соответствующих различным уровням интеграции информации в нейронных структурах, являющихся нейрофизиологическими коррелятами психических структур причинно-следственных взаимодействий в процессе мыслительной деятельности. Литература 1. Анохин П.К. Принципиальные вопросы общей теории функциональных систем // Принципы 4 системной организации функций. М.: Наука, 1973. 2. Нагоев З.В. Моделирование целенаправленного поведения в мультиагентных системах на основе принципа биоэнергетической оптимальности. Материалы международной научно-технической конференции «Инновационные технологии XXI века в управлении, информатике и образовании», КБГУ, 2008. 3. Редько В. Г. От моделей поведения к искусственному интеллекту. М. 2006 г. 5