Структура ПО РТК
реклама

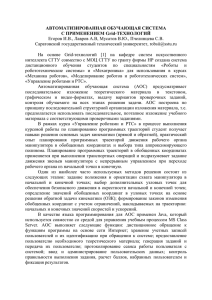
Московский Государственный Технический Университет им. Н.Э. Баумана Кафедра «Роботы и робототехнические системы» Отчёт по преддипломной практике «система управления РТК для обработки сложных поверхностей» Выполнил студент группы РК10-111: Максимов Е.М. Руководитель проекта: Москва 2007 Воротников С.А. Оглавление Введение ......................................................................................................................................................3 Цели и задачи дипломного проектирования .......................................................................................4 План диплома ..........................................................................................................................................4 Что сделано за практику .........................................................................................................................5 Основные определения. .............................................................................................................................6 Структура РТК. ..............................................................................................................................................6 Программная часть................................................................................................................................10 Общие положения .............................................................................................................................10 Блок построения траекторий. ...........................................................................................................11 Система кинематического моделирования ФСП. ...........................................................................16 Модель управления скоростью подачи при ФСП. ..............................................................................17 Модель управления. .........................................................................................................................17 Список литературы. ...................................................................................................................................21 Приложение. ..............................................................................................................................................22 Слайды работы программы построения траекторий и моделирования резания...........................22 Слайды работы симулятора манипулятора Puma ..............................................................................23 2 Введение В настоящие время развивается изготовление заказной сувенирной и рекламной продукции, мебели, в единичном экземпляре или очень малыми партиями. Обычно изделия изготавливаются из мягких цветных металлов, пластика или дерева. Это могут быть элементы орнамента для декорирования помещений, фигурные вывески, элементы эксклюзивной мебели. Раньше вся подобная продукция изготавливалась вручную, что требовало высокой квалификации мастера – гравера или резчика по дереву. Такие специалисты редки и их труд стоит очень высоко. Значительно выгоднее привлекать художников для создания компьютерных трёхмерных моделей требуемых изделий в специальных редакторах. По этим моделям изделия производятся на специализированном оборудовании, приспособленном для обработки сложных поверхностей. 3 Цели и задачи дипломного проектирования При прохождении преддипломной практики были сформулированы основная цель и задачи дипломного проекта: Цель: разработка комплекса Аппаратно-программных средств для фрезерования сложных поверхностей (далее ФСП). Комплекс включает в себя программы и устройства, которые позволяют выполнять фрезерную обработку сложных поверхностей заданных в виде компьютерных моделей, с использованием РТК на основе робота ПУМА. Принципы и алгоритмы рассмотренные далее при должной переработке можно применять и для обработки сложных поверхностей с помощью других систем, например, используя пяти- или трёхкоординатные фрезерные станки. Основные положения и определения (в частности, что такое «сложная поверхность») приведены далее. Задачи дипломного проектирования: 1) Разработка структуры РТК. 2)Разработка блока построения траекторий для ФСП. 3)разработка системы визуального кинематического моделирования ФСП. 4) Разработка алгоритма управления манипулятором при решении тестовой задачи 4) разработка мехатронного модуля фрезерования для робота РМ-01. 5) Разработка и изготовления макета РТК. План диплома Было составлено следующее содержание дипломного проекта: 1. Исследовательская часть 1.1 Анализ существующих методов и средств обработки резанием деталей сложной формы. 1.2 Анализ основных факторов, возникающих при фрезерной обработке древесины. 1.3 Разработка алгоритма построения безопасных траекторий. 1.3.1 Разработка алгоритма построения траекторий в пространстве модели. 1.3.2 Разработка алгоритма проверки траекторий в пространстве манипулятора. 1.4 Разработка математической модели процесса управления скоростью подачи при ФСП. 1.4.1 Разработка алгоритма фрезерования изделия. 4 2. 3. 4. 5. 1.4.2 Разработка математической модели мехатронного модуля фрезерования. 1.4.3 Определение параметров пневмопривода модуля фрезерования. Конструкторская часть 2.1 Разработка структуры СУ РТК. 2.2 Разработка конструкции мехатронного модуля фрезерования. 2.2.1 Разработка блока измерения скорости вращения фрезы. 2.2.2 Разработка интерфейсного устройства. Технологическая часть Экономическая часть. Охрана труда и техника безопасности. Был составлен следующий перечень листов для демонстрации: 1. Постановка задачи (название, цель). 2. Анализ известных решений (схемы обработки, таблица, вывод) (2 листа). 3. Структура СУ РТК для ФСП. 4. Функциональная схема подсистемы СУ РТК для ФСП. 5. Структура ПО РТК (взаимодействие модулей). 6. Структура ПО для построения траекторий. 7. Алгоритм построения траекторий. 8. Разработка и исследование модели системы управления скоростью подачи при ФСП. 9. Алгоритм работы ПО регулирования (конечный автомат или сеть Петри) 10. Конструкция мехатронного модуля. 11. Технологическая часть. Техпроцесс изготовления датчика. 12. Экономическая часть. Что сделано за практику При прохождении преддипломной практики было сделано: Составлена структурная схема РТК. Разработаны алгоритмы и программы для построения траекторий и кинематического моделирования фрезерования. Разработана модель управления скоростью подачи при ФСП. Рассмотрены возможные конструкции мехатронного модуля для ФСП. 5 Основные определения. Сложная поверхность. Сложной поверхностью в данной работе называется открытая трёхмерная поверхность части детали. Поверхность формируется инженером или художником в специализированных программах будь то AutoCAD или LightWave и сохраняется в стандартном формате. Вопросы и проблемы формирования этих поверхностей выходят за рамки дипломного проектирования. Далее даются лишь требования к самим поверхностям и формату их хранения. Выпуклая поверхность (2,5D поверхность). Поверхность, которая может быть спроецирована на плоскость без самопересечений называется выпуклой. Здесь и далее предполагается, что поверхность выпукла относительно горизонтальной плоскости. «2.5D» – стандартный термин, принятый в англоязычной литературе. Траектория инструмента. Траекторией инструмента здесь называется упорядоченный массив точек и углов ориентации инструмента. В процессе обработки опорная точка инструмента проходит по всем заданным точкам траектории. Различают траектории в пространстве модели и траектории в пространстве манипулятора. Не всякую траекторию в пространстве модели можно реализовать в пространстве манипулятора т.к. некоторые точки траектории могут выходить за рабочую зону или приводить к особым конфигурациям манипулятора. Наша задача - сформировать допустимые траектории в пространстве манипулятора, приводящие к формированию заданной поверхности при фрезеровании. Структура РТК. Робототехнический комплекс, имеющийся на кафедре, состоит из следующих структурных блоков. Рисунок 1. вид РТК 1. Промышленный манипулятор PM – 01 (с пневмоприводом фрезы в качестве концевого устройства.) 2. Устройство управления «СФЕРА – 36» 3. Блок пневмоэлектроавтоматов, система автоматической смены оснастки. 6 Манипулятор PM-01 (PUMA -560) был разработан первоначально как программируемый универсальный манипулятор для выполнения операций сборки. Он является антропоморфным, имеет шесть степеней подвижности. Шесть звеньев и основание манипулятора образуют шесть пар звеньев пятого класса. Вращение звеньев осуществляется вокруг осей, проходящих через центры суставов. В состав звеньев входят следящие электроприводы постоянного тока и зубчатые передачи. Передачи четвертого, пятого и шестого звеньев имеют гибкие муфты. В передачах применены косозубые шестерни. Серводвигатели приводов оснащены электромагнитными тормозами, которые включаются при выключении питания двигателей, обеспечивая фиксацию манипулятора. Звенья манипулятора могут перемешаться в строго определенном диапазоне: первое звено от -160 до +160 град, второе звено от -225 до +45 град, третье звено от -45 до +225 град, четвертое звено от -ПО до +170 град, пятое звено от -100 до +100 град, шестое звено от -266 до +266 град. Максимальная грузоподъемность манипулятора 2,5 кг при общей его массе 53 кг. Статическое усилие в рабочей точке инструмента достигает 60 Н. Манипулятор, работая с данной системой управления, обеспечивает точность позиционирования +/- 0,1 мм, которая является средней для данного типа роботов. Она достигается в основном за счет высокой точности механического исполнения манипулятора, равной 0,00254 мм, и высокой разрешавшей способности СУ. Рабочее пространство PM-01 - сферическое с радиусом 0,92 м. В его пределах обеспечивается скорость перемещения охвата с максимальным грузом по свободной траектории до I м/с, а по прямолинейной траектории до 0,5 м/с. Для манипулятора можно ввести несколько систем координат, все они являются правыми прямоугольными. Базовая система координат находится на основании (колонне). Система координат инструмента связана с фланцем манипулятора. В этой системе координат все перемещения определяются относительно рабочего органа. С каждым звеном связана собственная система координат. С их помощью определяют взаимные перемещения звеньев. Для выполнения технологических функций, таких, как снятие облоя, сборка и других, создан набор инструментов, размещаемый в специальном магазине. Инструмент автоматически крепится на фланец манипулятора через специальное устройство - систему автоматической смены оснастки. Блок пневмоэлектроавтоматов (БПЭА) многофункциональное устройство, обеспечивающее электропитанием и воздухом манипулятор и технологическое оборудование. Блок совместно с устройством управления робота осуществляет управление различными устройствами РТК, задает режимы работы робота и отображает его текущее состояние на панели управления. Функциями блока являются регистрация 7 количества обработанных деталей, а также, при необходимости, аварийное отключение комплекса. БПЭА имеет сорок шесть информационных каналов связи с технологическим оборудованием. Обмен информацией осуществляется установкой в каналах напряжения высокого или низкого уровня. Через каналы осуществляется управление транспортером, двигателями и фиксацией поворотного стола, управление подачей воздуха, перемещением паллет и т.п. БПЭА также включает в себя двадцать восемь пневматических каналов управления исполнительными механизмами. Например, для открывания и закрывания охвата, фиксации деталей и инструментов, перемещения паллет. Тридцать два входных и тридцать два выходных канала связи системы управления с роботом обеспечивают своевременное получение информации не только от технологического оборудования, но и от манипулятора (например, код инструмента на фланце), магазина инструмента и других устройств. Управление основными пневмоэлектроклапанами блока может осуществляться в ручном режиме. Для этого имеется специальная панель, расположенная внутри блока. Данный режим применяется для проверки работы и регулировки клапанов. Система автоматической смены оснастки (САСО) используется для автоматической смены роботом в программном режиме большого количества инструментов. Стыковка инструмента с фланцем запястья манипулятора осуществляется через специальную вилку на фланце и гнездо на каждом инструменте. Каждый инструмент расположен в отдельной ячейке магазина и закодирован. Из своего гнезда инструмент может быть взят роботом и туда же помещен. Рисунок 2. Существующая структура РТК Пневмопривод фрезы выделен в отдельный блок т.к. он является основным технологическим оборудованием. Вообще он относится к БПЭА, и перед началом работы автоматически закрепляется на последнем звене манипулятора. 8 Стрелка от манипулятора к пневмоприводу обозначает то, что пневмопривод закреплён на последнем звене манипулятора и двигается вместе с ним. Стрелка от УУ к пневмоприводу обозначает то, что по команде УУ на привод подаётся рабочее давление. Так как режущий инструмент закрепляется на последнем звене манипулятора, то им можно отрабатывать сложные кривые в трёх измерениях, с изменением наклона инструмента. Это позволяет производить обработку резаньем деталей сложной формы, со сложными поверхностями. Устройство управления Сфера-36 реализует позиционное управление манипулятором и позволяет задать скорость движения последнего звена по прямой. Можно управлять перемещением с помощью задания обобщённых координат, в основной декартовой системе координат, в системе координат инструмента. Устройство управления не может само строить траектории или перемещать схват манипулятора по сложной кривой. Оно может только обеспечивать прямолинейное движение в заданную точку с заданной скоростью. Следовательно, для реализации требуемой траектории необходимо сформировать достаточно плотный массив точек, т.е. линейно интерполировать траекторию. В ЗУ Сферы можно записать около 400 точек, что явно недостаточно для траекторий ФСП (в которых может быть до нескольких десятков тысяч точек). При пятиосевой обработке необходимо менять ориентацию инструмента от точки к точке. При существующей структуре РТК это проблематично из-за ограничений языка ARPS, используемого УУ. Так же была обоснована необходимость изменять скорость подачи т.е. скорость движения последнего звена в процессе ФСП (см. далее). В связи со сказанным предлагается следующая структурная схема РТК. Рисунок 3. Структура проектируемого РТК 9 Здесь PC – персональный компьютер. Все блоки внутри него – программные модули. Мехатронный модуль – единое устройство, включающее в себя пневмопривод и датчик скорости вращения фрезы. Устройство связи - некое устройство, ещё не спроектированное, которое позволит считывать показания датчика скорости и сигналы с линий УУ и передавать их на управляющий персональный компьютер по LPT порту. Программная часть Общие положения Программная часть проектируемой СУ РТК включает в себя блок построения траекторий, систему визуального кинематического моделирования ФСП, блок управления скоростью подачи и блок формирования команд для УУ Сфера. Рисунок 4. схема работы программы расчёта траекторий и моделирования 10 Сейчас блок формирования траекторий и блок визульного кинематического моделирования вместе составляют отдельную программу. Планируется и их разделить на две программы т.к. они решают разные задачи. Блок построения траекторий. Блок построения траекторий служит для расчёта траекторий ФСП. На вход программы поступает файл задающий геометрию обрабатываемой поверхности. Геометрия задаётся в виде массива соединённых треугольников, которые аппроксимируют желаемую поверхность. В качестве формата хранения используется STL – stereolytography. Формат разработан компанией SONY для работы с системами быстрого создания твёрдых моделей (rapid prototyping). Это текстовый формат. Треугольники записаны неупорядочено. Предполагается, хотя не гарантируется, что треугольники не пересекаются, а только стыкуются рёбрами и вершинами, образуя одну замкнутую поверхность. Файл модели в этом формате можно получить практически в любом трёхмерном редакторе. Так же аналитически задаётся модель фрезы. Это может быть цилиндр для торцевой цилиндрической фрезы, усеченный конус или сфера для специальных фрез и абразивных головок. Известны соответствующие параметры фрезы (для цилиндра это диаметр). На выходе программы мы получаем массив координат фрезы, составляющих рассчитанную траекторию в пространстве модели. Массив сохраняется в виде текстового файла для дальнейшей обработки и передачи на устройство управления манипулятором. Задача расчёта траекторий Задача нахождения траектории сводится к нахождению множества положений инструмента, такого, что при геометрическом вычитании этого множества из геометрической модели заготовки получалось бы изделие, как можно близкое по форме к заданной модели. Сказанное выше следует понимать в общем, без привязки к конкретному способу описания геометрических моделей. В общем случае эта задача даже не имеет строгой постановки. Её можно разложить на этап получения неупорядоченного множества опорных точек инструмента, в каждой из которых есть касание модели инструмента и модели требуемого изделия, и на этап упорядочивания этого множества для получения наиболее короткого пути обхода по всем точкам этого множества. Сложность первого этапа сильно зависит от выбранного способа математического представления моделей изделия и инструмента. Второй этап соответствует задачи коммивояжёра. Так же на множество возможных решений задачи расчёта траектории в каждом конкретном случае накладываются дополнительные требования и ограничения связанные с особенностями технологического процесса обработки. Обычно второй этап напрямую не решается, а явно изначально выбирается определённый способ прохода инструментом по всей площади заготовки – т.н. опорная 11 траектория. Тогда задача сводится к пересчёту точек опорной траектории, с сохранением их порядка. Есть несколько общепринятых вариантов опорных траекторий – зигзаг, спираль и т. п. Рисунок 5.Опорные траектории: а) зигзаг, б) спираль В инженерной практике выделяют 2 основных вида ФСП. Это: 1) Трёх-осевая обработка. 2) Пяти-осевая обработка. Рисунок 6. 3-х осевое (а) и 5-ти осевое (б) фрезерование В случае трёх-осевого фрезерования ориентация фрезы неизменна в процессе всего прохода по траектории. В случае пяти-осевой обработки ориентация фрезы может меняться. Обычно фреза ориентируется по возможности нормально к поверхности в данной точке траектории. 12 Различия между трёх-осевой и пяти-осевой обработкой относительно формы получаемой поверхности больше всего видны в направлении перпендикулярном движению подачи. С помощью пяти-осевого фрезерования можно обрабатывать не только выпуклые поверхности, но и сложные поверхности с сильными изгибами и углублениями. Пятиосевое фрезерования даёт существенно меньшую теоретическую погрешность при обработке (как видно из рисунка). Однако алгоритмы получения траекторий для пятиосевой обработки значительно сложнее. Рисунок 7. Методическая погрешность при 3-х (а) и 5-ти осевом (б) фрезеровании Алгоритм «Падающая фреза» Мною был реализован единый алгоритм для расчёта точек касания модели инструмента с моделью заготовки. Пусть координатами вершин задан треугольник, аналитически задана модель фрезы. Фреза находится в начале координат и может перемещаться вдоль оси Z. Найдём 13 координаты z точек касания модели фрезы с каждой из трёх точек, с каждым из трёх рёбер и с плоскостью треугольника. Тогда максимальное из найденных значений – искомое положение фрезы. Рисунок 8. Алгоритм "падающая фреза" Сейчас алгоритм реализован для случая цилиндрической фрезы. Работа алгоритма в каждой точке траектории на всём множестве треугольников – очень ресурсоемкая задача. И в каждой точке имеет смысл пересечение фрезы лишь с несколькими треугольниками. Поэтому была произведена оптимизация алгоритма с использованием иерархического разбиения пространства (восьмеричное дерево). Расчёт траекторий для 3-х и 5-ти осевого ФСП. В текущей реализации в обоих случаях опорной траекторией является зигзаг. При расчёте 3-х осевого ФСП фреза всегда считается вертикальной, и расчёт траектории сводится к выполнению алгоритма «падающая фреза» в каждой точке опорной траектории. 14 При 5-ти осевой обработке алгоритм расчёта сложнее. Для каждой точки опорной траектории вычисляется три возможных положения инструмента и выбирается то, которое ближе к соответствующей точке модели. Рисунок 9. расчёт траектории для 5-ти осевого ФСП 15 Система кинематического моделирования ФСП. Для того чтобы исключить наличие в траектории манипулятора запрещённых точек, а так же для проверки отсутствия столкновений манипулятора с другими объектами в рабочей зоне робота была сделана программа кинематического моделирования перемещений робота. Для манипулятора Puma были составлены системы координат Денавита-Хартенберга. (Рис. 4) Рисунок 10. Системы Д.-Х. для манипулятора РМ-01 Параметры Денавита-Хартенберга для каждого звена: N звена d мм a мм α◦ 1 0 0 -90 2 431.8 0 0 3 0 20.32 90 4 433.07 0 90 5 0 0 90 6 56.25 0 0 Далее составляются матрицы перехода для каждого звена. ci ci si si si ai ci s c c s s a s i i i i i i i Ai (ai , di , i , qi ) 0 si ci di 0 0 0 1 16 Решение прямой и обратной задачи о положении для манипулятора ПУМА подробно описано в [1]. Была написана библиотека, функции которой позволяют линейно интерполировать траектории схвата и решать задачу о положении в каждой интерполируемой точке. Модель управления скоростью подачи при ФСП. В процессе резания, при прохождении режущего инструмента по траектории, в широких пределах меняется ширина срезаемого слоя материала. Так же имеет место неоднородность и анизотропность материала заготовки. Всё это приводит к значительному изменению сил сопротивления резанию в процессе обработки. Необходимо исключить стопорения инструмента и, как следствие, повреждение заготовки. Так же желательно увеличить скорость подачи на тех участках, где нагрузка на инструмент мала. Модель управления. Для поддержки режима резания необходимо поддерживать заданную силу резания, которая пропорциональна крутящему моменту, развиваемый двигателем. Момент поддерживается изменением скорости подачи т.е. скорости перемещения фланца манипулятора. Предполагаемая схема управления приведена ниже. 17 18 N* 10000 1 s 2 to w* pi/30 Preassure moment u Integrator P*Se-Mfric Disipative coef. Bk inertia 1/J PNEUMATIC MOTOR 0.2 I 1 s x Vx 1 s Transport Delay x milling lenght Integrator1 PUMA milling depth bearing speed 30 PID controler (s+Ti) K(s-Td) Vx w Transfer Fcn Tpuma.s+1 1 cos(alpha) | V| M Product Pp Fx Fxround milling model depth b Vsup w MILLING MODEL w to n 30/pi x V Vx b n M Scope b, mm 50 0 0 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 t, s 6 7 8 9 10 V, mm/s 100 50 0 0 n, r.p.m. 4 2 x 10 1 0 M, Nm 0.04 0.02 0 Модель пневмопривода В качестве двигателя фрезы на РТК используется пластинчатый ротационный пневмодвигатель 19 Двигатель имеет следующие механические характеристики (в общем виде). n0 – паспортная частота вращения об/мин. M0 – крутящий момент N0 – мощность Q0 – расход воздуха Работа двигателя описывается следующим дифференциальным уравнением: J S P M Mc B 2 Где w – угловая скорость вращения двигателя. J – момент инерции ротора двигателя и оснастки. S – объёмный коэффициент P – питающее давление M – момент полезной нагрузки Mc – момент сопротивления (силы трения) B – коэффициент квадратичного трения. Для настройки ситемы управления необходимо определить параметры S,Mc,B,J. Для определения Mc,B и S надо провести серию испытаний – замерить установившуюся угловую скорость ротора без нагрузки для разных значений P. Очевидно, что минимальное количество испытаний с разными P – 3. Для определения скорости вращения ротора двигателя необходимо сконструировать датчик угловой скорости. Предположительно – на основе оптронной пары. 20 Список литературы. 1. С. Л. Зенкевич, А. С. Ющенко Основы управления манипуляционными роботами. М.: Изд. МГТУ, 2004 2. С. А. Воротников. Информационные устройства робототехнических систем. М: Изд. МГТУ, 2005 3. A. C. Ющенко, А. П. Власов. Робототехнический комплекс на базе манипулятора РМ-01. М.: Изд. МГТУ, 1992 4. В. И. Любченко. Резание древесины и древесных материалов. М.: Изд. МГУЛ, 2004 5. С. Б. Зеленецкий, Е.Д. Рябков, А.Г. Микеров. Ротационные пневматические двигатели. 6. Промышленный робот РМ-01. Руководство по программированию. А/O “НОКИА” 7. «Описание языка программирования ARPS», оригинальный текст NOKIA. Финляндия, переведено на русский язык. 8. 9. 10. 11. 12. http://en.wikipedia.org/wiki/Computer-aided_manufacturing http://en.wikipedia.org/wiki/Direct_Numerical_Control http://en.wikipedia.org/wiki/CNC http://www.freesteel.co.uk/wpblog/category/machining/ http://www.instankoservis.ru/ 21 Приложение. Слайды работы программы построения траекторий и моделирования резания. 22 Слайды работы симулятора манипулятора Puma Робот в положении READY. Манипулятор в одном из рабочих положений. 23 Система координат схвата. Превышение предела 5-й обобщённой координаты 24 Превышение допустимой скорости в 4-м шарнире. 25 Симулятор с загруженной моделью оборудования РТК. Столкновение с элементом сцены. 26