Практические занятия по начертательной геометрии
реклама

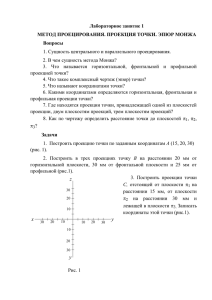
1 ВВЕДЕНИЕ Учебный процесс по начертательной геометрии включает следующие формы обучения: лекции, самостоятельную работу студентов (СРС), практические занятия, контроль знаний по темам курса, выполнение графических работ, экзамен. Лекции. На лекциях студенты получают основную информацию по теоретическим основам курса, знакомятся с методами решения задач. СРС. Теоретический материал углубленно изучается по рекомендованным учебникам и закрепляется решением упражнений, помещенных в этой тетради. Выполняются расчетно-графические работы по индивидуальным заданиям. Практические занятия. 1. Преподаватель проверяет задачи, самостоятельно решенные студентами и консультирует группу по материалу темы. 2. Проводится контроль знаний, оценивается степень подготовки студентов к практическим занятиям. 3. Решаются задачи из тетради или выполняются расчетно-графические работы. Рабочая тетрадь включает материал, обеспечивающий закрепление знаний по темам курса в процессе самостоятельной работы студентов, а также материалы, необходимые для проведения практических занятий и выполнения расчетно-графических работ. Учебный материал сгруппирован по практическим занятиям в соответствии с рабочей программой курса. В разделе для каждого практического занятия содержатся: 1. Краткие теоретические сведения и методические указания к изучаемой теме. 2. Упражнения для самостоятельного решения студентами после прослушанной лекции. 3. Условие задач, рекомендованных для решения на практических занятиях под руководством преподавателя. В рабочей тетради приняты обозначения: Точки обозначаются прописными буквами латинского алфавита (А, B, C, D,…), а также цифрами – 1, 2, 3,… Линии обозначаются строчными буквами латинского алфавита – а, b, с, d,… Плоскости обозначаются буквами греческого алфавита – , , , , ,… 2 Плоскости проекций обозначаются: 1 – горизонтальная плоскость проекций, 2 – фронтальная плоскость проекций, 3 – профильная плоскость проекций. Проекции точек, линий, плоскостей обозначаются теми же буквами, что и оригиналы, только с индексами, соответствующими индексам плоскостям проекций – А1, А2 ... 11, 12,... 3 1. ТОЧКА И ЕЕ ПРОЕКЦИИ Модель проецирования точки Комплексный чертеж точки z z A2 p 2 A3 A3 A x 0 y A2 z x x O A3 y p 3 p y 1 A1 A1 Рис. 1.1 y A1 y Рис. 1.2 Определитель точки пространства – координаты х, y, z точки, то есть расстояния точки от трех координатных плоскостей. Принимается, что плоскости проекций совмещены с координатными. Условная запись определителя точки: А(х, y, z). Проекцией точки называется точка пересечения проецирующего луча с плоскостью проекций. Комплексным чертежом называется плоский чертеж, состоящий из проекций изображаемого образа, размещенных в проекционной связи друг с другом. Линия проекционной связи всегда перпендикулярна оси проекций, разделяющие данные изображения. Комплексный чертеж точки содержит две проекции точки, связанные между собой линией проекционной связи. Для комплексного чертежа точки имеют такие положения: 1. Фронтальная и горизонтальная проекции точки всегда располагаются на вертикальной линии связи (А2А1 ох). 2. Фронтальная и профильная проекции точки всегда располагаются на горизонтальной линии связи (А2А3 оz). 3. Расстояние от фронтальной проекции точки до оси ох определяет высоту и определяется координатой z. Расстояние от горизонтальной проекции точки до оси ох определяет глубину точки и определяется координатой y. 4 4. По горизонтальной и фронтальной проекциям точки всегда можно построить ее профильную проекцию. Для этого на горизонтальной линии связи, проведенной через А2, откладываются от оси оz координата y (координатным или графическим путем). Контрольные вопросы 1. К каким проекциям относится ортогональная проекция точки? 2. Что такое чертеж точки? 3. Как получается чертеж в системе 1, 2, 3? 4. Как на чертеже определяется расстояние точки от плоскостей проекций 1, 2, 3? 5. При каком условии точки А и В находятся на одинаковом расстоянии от плоскости 3? 6. К какой из плоскостей проекции ближе всех расположена точка К (50, 30, 20)? 7. Сколько проекций точки определяют ее положение в пространстве? 8. При каком условии точка А будет равноудалена от плоскостей проекций 1, 2, 3? 1.1. Задачи 1.1.1. Построить чертеж точек: А (40, 15, 20); В (30, 30, 0); С (40, 0, 20); D (0, 30, 30). Построить наглядное изображение. 1.1.2. Построить третьи проекции т. А, В, С, D. B2 D2 A2 z B3 Ñ2 x D1 O A1 Ñ1 y y 5 1.1.3. Построить третьи проекции т. А, В, С, D. z D3 x B1 B2 O C1 C2 A3 y D1 A1 y 1.1.4. Построить третью проекцию точек. Измерить и записать координаты точек. Построить наглядное изображение точек. C2 A2 z z F2 D2 x B2 E2 E1 F 1 G2 O C1 A1 B1 y x O G1 D1 y y 6 1.1.5. Построить проекции точки В, расположенной на 20 мм выше плоскости 1 и на 15 мм ближе к плоскости 2, чем данная точка А. A2 Bx Ax x A1 1.1.6. Построить проекции точек А и В симметричных точке С (20, 15, 30) относительно плоскости 1 и начала координат. z x O y y 1.1.7. По проекции А2 построить проекции А2 и А3 так, чтобы z = y произвольно). 2 (А2 - 7 z A2 O x y y 1.1.8. По проекции В3 построить проекции А1 и А2 так, чтобы y = 2x (В3 произвольно). z x O y B3 y 8 2. ПРОЕЦИРОВАНИЕ ПРЯМОЙ p 2 p 2 B2 A2 B A x N x B1 A1 M p 1 p 1 B2 N2 A2 x YN O M2 ZM O N1 x B1 M1 A1 Рис. 2.1. Проекция прямой Рис. 2.2. Следы прямой B2 B ZB ZA ZB -ZA A2 A x p 1 A1 x B1 B1 ZB -ZA B0 A1 Рис. 2.3. НВ отрезка прямой B0 9 - Определитель прямой: две точки (АВ) или отрезок (l). - Точка принадлежит прямой, если проекции точки принадлежат одноименным проекциям прямой. - Проекциями прямой, в общем случае, являются прямые линии. - Точки пересечения прямой с плоскостями проекций называются следами прямой и определяются как особые точки прямой, одна из координат которых равна нулю. - Натуральная величина (НВ) отрезка прямой общего положения определяется величиной гипотенузы прямоугольного треугольника, построенного на одной из проекций, как на катете. Второй катет треугольника равен разности расстояний концов отрезка от той плоскости проекций, на которой взят первый катет. 2.1. Проекции прямых общего и частного положения 12 HB l2 22 f2 32 h2 x 21 l1 42 52 x 51 11 h1 41 f1 HB 31 HB 92 Ê2 102 x 81 t1 HB 61 h(3.4) 1; f(5.6) 2 Рис. 2.5. Прямые уровня l(l1 l2) Рис. 2.4. Прямая общего положения t2 = 7 2 = 8 2 62 K1 =9 1 = 10 1 71 Рис. 2.6. К(9.10) 1; t(7.8) 2 Прямые проецирующие 10 Контрольные вопросы 1. Сколько проекций прямой определяют ее положение в пространстве? 2. При каком расположении относительно плоскостей проекций прямая называется прямой общего положения? 3. Как называются прямые, параллельные плоскостям проекций 1, 2, 3. 4. Как можно определить по чертежу лежит ли точка на прямой? 5. Что называется следом прямой? 6. Как определяется натуральная величина отрезка прямой общего положения? 7. Возможные взаимные расположения двух прямых в пространстве? 8. Как определяется видимость линий на чертеже? 9. В каком случае прямой угол проецируется в натуральную величину? 2.2. Задачи 2.2.1. Построить на эпюре третью проекцию прямой и недостающие проекции принадлежащей ей точки К. а) б) B2 z A 3 z K3 x A2 Î B1 y B3 Î x y A1 K1 A1 y B1 y 11 в) г) A2 z B2 B3 K2 K2 x z A2 A3 Î y x A1 B2 Î y B1 y A1 д) y е) z z B3 A2 Î x B2 A1 Î x y K3 A3 K1 y B1 B1 A1 y y ж) з) z z A3 A2 A2 x K2 B2 A3 Î y K3 B3 y x B2 Î y B3 y 12 2.2.2. Построить на прямой точки: А с координатой z = 25мм. В с координатой z = 0мм. С с координатой y = 20мм. l2 O x l1 2.2.3. Дана ломанная линия ABCDE. Найти натуральную величину (НВ) этой ломанной линии. Построить на отрезке CD точку К, если СК= 15мм. D2 À2 B2 Å2 C2 x Å1 À1 = Â1 C1 D1 2.2.4. Определить натуральную величину (НВ) отрезка АВ и угол наклона его к плоскости проекций 1. B2 x À2 B1 À1 13 2.2.5. На прямой l отложить отрезок АВ = 30мм. l2 À2 x À1 l1 2.2.6. Построить проекции точки С принадлежащей прямой АВ и удаленной от плоскости 2 на 25мм. x À2 z B2 O y À1 B1 y 2.2.7. Построить фронтальную проекцию точки А, отстоящей от точки В на 40мм. B2 x À1 B1 14 2.2.8. Через точку М провести прямую l, параллельную прямой k. M2 k2 x k1 M1 2.2.9. Через точку А провести прямую АВ, параллельную прямой KL. K2 A2 x L2 L1 K1 A1 2.2.10. Через точку А провести горизонтальную прямую h, пересекающую прямую k. A2 k2 x k1 A1 2.2.11. Провести фронтальную прямую f, находящуюся от плоскости 2 на расстоянии 25мм и пересекающую параллельные прямые a и b. 15 a2 b2 x b1 a1 2.2.12. Через точку М провести прямую k, пересекающую прямую а и ось z. M2 a2 x a1 M1 2.2.13. Построить проекции прямой, параллельной прямой пересекающей прямые b и d. d2 b2 a2 x d1 b1 a1 a и 16 2.2.14. Через точку Е провести прямую, пересекающую прямые АВ и CD. A2 x E2 C2 D2 B2 C1 E1 A1 B 1 D1 2.2.15. Построить проекции равнобедренного АВС. Если СМ – высота АВС; СМ || 1; А 1; B 2. M2 C2 x M1 C1 2.2.16. АС диагональ ромба ABCD. В 1. Вершина D равноудалена от плоскостей 1 и 2. Построить проекции ромба, если АС|| 2. 17 A2 C2 x C1 A1 3. ПРОЕЦИРОВАНИЕ ПЛОСКОСТИ B2 B À À2 L C K À1 À1 L1 B1 C1 K1 Рис. 3.1. Модель плоскости C2 K2 N2 x N x L2 N1 B1 L1 C1 K1 N1 p 1 Рис. 3.2. Чертеж плоскости 1. На чертеже плоскость может быть задана: проекциями трех точек, не лежащих на одной прямой; проекциями прямой и точки вне этой прямой; проекциями параллельных прямых; проекциями пересекающихся прямых; проекциями плоской фигуры; следами. 2. Прямая принадлежит плоскости, если она проведена через две точки, заведомо лежащие в этой плоскости или проходит через одну и параллельна прямой, лежащей в этой плоскости. 3. Точка принадлежит плоскости, если она построена на прямой, принадлежащей заданной плоскости. 4. По отношению к плоскости проекций плоскости разделяются на плоскости общего положения и плоскости частного положения – 18 проецирующие (перпендикулярные к одной из плоскостей проекций) и уровня (параллельные к одной из плоскостей проекций). 5. В плоскости можно провести линии уровня (горизонталь, фронталь, профильная прямая), линию наибольшего наклона к каждой из плоскостей проекций. h2 x 32 22 12 h2 d2 c2 32 a2 b2 f2 22 12 f2 x 31 h1 h1 11 21 31 b1 11 21 f1 c1 d1 a1 Рис. 3.3. Горизонталь 3.1. Рис. 3.4. Фронталь Задачи 3.1.1. Построить l1 и m2 прямых, лежащих в плоскости АВС. B2 l2 x C2 A2 B1 m1 C1 A1 3.1.2. Построить m2 прямой m, лежащей в плоскости (k l). f1 19 k2 b2 x b1 k1 m1 3.1.3. Построить плоскости (k l). горизонтальную АВС, проекцию лежащего в B2 l2 k2 C2 A2 x k1 l1 3.1.4. Построить профильную проекцию АВС и недостающие проекции точки М, принадлежащей АВС. B2 M2 x A2 z C2 Î B1 A1 C1 y y 20 3.1.5. Построить D2 и E1 точек D и E, принадлежащих плоскости (а b). b2 a2 E2 x a1 D1 b1 3.1.6. Построить горизонтальную проекцию пятиугольника A1B1C1D1E1 по фронтальной проекции и горизонтальной проекции двух смежных сторон А1В1С1. D2 E2 A2 C2 B2 x B1 A1 C1 3.1.7. Построить горизонтальную проекцию АВС, принадлежащего плоскости (f h). f2 B2 A2 C2 h2 x f1 h1 21 3.1.8. Провести в каждой из заданных плоскостей горизонталь (h) на расстоянии 15 мм от 1 и фронталь (f) на расстоянии 20 мм от 2. a2 n2 m2 b2 x x a1 m1 b1 n1 3.1.9. В плоскости горизонтали (h1). (а b) построить a2 недостающую проекцию b2 h2 x a1 b1 3.1.10. Построить горизонтальный фронтальным следом f0 и точкой А. след плоскости , заданной f2 o 22 A2 o f1 x A1 3.1.11. Определить горизонтальную проекцию прямой m, проходящей через точку А и параллельную плоскости (f h). m2 f2 A2 h2 x f1 h1 A1 3.1.12. Через прямую а провести плоскость параллельную прямой b. a2 b2 x b1 a1 23 3.1.13. Построить проекции горизонтальной прямой, параллельной плоскости (а b) и проходящей через точку А. a2 b2 A2 x A1 b1 a1 3.1.14. Построить горизонтальную которого параллельна прямой а. проекцию АВС, плоскость B2 a2 A2 C2 x C1 a1 A1 3.1.15. Построить горизонтальную проекцию АВС, плоскость которого параллельна плоскости ( h f), (А2В2 f2). 24 B2 f2 h2 x f1 A2 C2 A1 h1 3.1.16. Через точку М провести параллельную плоскости (f h). профильную прямую (M-N), f2 M2 h2 x f1 h1 M1 3.1.17. Через точку А провести плоскость , параллельную прямой. l2 A2 l2 l1 A2 A1 l1 A1 а) 1 б) 3 25 4. ВЗАИМНОЕ ПОЛОЖЕНИЕ ПЛОСКОСТЕЙ o N2 f2 o f2 2 o f2 N1 x N2 x M2 h2 N1 o h1 o h1 h1 o h1 M1 Рис. 4.1. Плоскости пересекаются f2 f2 h2 h2 f1 f1 h1 h1 x а) б) Рис. 4.2 1. Линия пересечения двух плоскостей определяется либо двумя точками, одновременно принадлежащими заданным плоскостям, либо одной общей точкой и известным направлением этой линии. 2. Если одна из пересекающихся плоскостей горизонтальная или профильная плоскость уровня, то линия пересечения плоскостей будет, соответственно, горизонталью и фронталью. 26 3. Точки, принадлежащие линии пересечения двух плоскостей, определяются методом вспомогательных секущих плоскостей. Заданные плоскости пересекаются вспомогательной (проецирующей или плоскостью уровня) и определяется точка, общая для всех трех плоскостей; она и принадлежит искомой линии пересечения заданных плоскостей. 4. В общем случае, три плоскости пересекаются в одной точке. 5. Признаком параллельности двух плоскостей является параллельность двух пересекающихся прямых одной плоскости, соответственно, двум пересекающимся прямым второй плоскости. У плоскостей частного положения параллельны их одноименные следы проекции. 6. У параллельных плоскостей одноименные линии уровня (горизонталь, фронталь, профильная прямая) взаимно параллельны. 4.1. Задачи 4.1.1. Построить линию пересечения плоскости (а b) с плоскостью (Г 2). b2 Ã2 a2 x a1 b1 4.1.2. Построить линию пересечения плоскости (c d) с плоскостью ( 1). c2 d2 x d1 c1 1 4.1.3. Построить линию пересечения плоскости Г(АВС) с плоскостью ( 1). 27 A2 C2 B2 x 1 A1 C1 B1 4.1.4. Построить линию пересечения плоскости Г(а b) с плоскостью (cd). c2 a2 d2 b2 x c1 d1 a1 b1 4.1.5. Построить линию пересечения плоскости (f0h0) с плоскостью (f0h0). o f2 o f2 o x o f1 h 2 o h1 o o f1 h 2 o h1 4.1.6. Найти линию пересечения двух плоскостей: 28 o 2 f2 o 2 o f1 h 1 x b2 a2 o h1 b1 a1 f2 o h2 f2 f1 1 o f2 x o h1 o h1 h1 o f2 l2 o f2 n2 m2 k2 x o h1 m1 k1 o h1 l1 n1 29 5. ВЗАИМНОЕ ПОЛОЖЕНИЕ ПРЯМОЙ И ПЛОСКОСТИ B2 S 2 l 2 M2 12 A2 o 22 A2 C2 x N2 M2 x B1 f2 N1 A1 11 o A1 M1 h1 21 l1 Рис. 5.1 Пересечение прямой с плоскостью M1 C1 Рис. 5.2 Параллельность прямой и плоскости 1. Точка пересечения прямой с плоскостью (точка встречи) определяется как точка, принадлежащая одновременно и прямой и плоскостью. 2. Если плоскость частного положения, то траектория точки пересечения с прямой находится на пересечении следа-проекции плоскости с соответствующей проекцией прямой, а вторая из условия принадлежности с прямой. 3. Если плоскость и прямая общего положения, то точка встречи находится в такой последовательности: а) прямую заключаем в проецирующую плоскость; б) строим линию пересечения вспомогательной (проецирующей) и заданной плоскостей; в) находим точку встречи на пересечении полученной линии с заданной прямой. 4. Признаком параллельности прямой и плоскости частного положения является параллельность следа-проекции плоскости соответствующей проекции прямой. 5. Признаком параллельности плоскости и прямой является параллельность прямой некоторой прямой плоскости. 30 5.1. Задачи 5.1.1. Построить точку пересечения прямой АВ с плоскостью ( 2). 2 A2 B2 x A1 B1 5.1.2. Построить точку пересечения прямой СD и плоскостью Г(Г 1). C2 D2 x C1 D1 1 5.1.3. Построить проекции точки пересечения прямой m c плоскостью (АВС). C2 A2 B2 x m2 C1 A1 B1 m1 5.1.4. Построить точку пересечения прямой m с плоскостью (f h). 31 f2 m2 h2 x f1 m1 h1 5.1.5. Построить точку пересечения прямой l с плоскостью (а b). a2 l2 x b2 a1 l1 b1 5.1.6. Построить точку пересечения прямой а с плоскостью (АВС). a2 A2 C2 B2 B1 x A1 a1 C1 32 6. ПЕРПЕНДИКУЛЯРНОСТЬ ПРЯМЫХ И ПЛОСКОСТЕЙ B2 r2 2 l 2 f2 o f2 h2 A2 C2 x B1 A1 K2 x A1 A 2 h1 r1 K1 f1 l1 o h1 C1 Рис. 6.1 Рис. 6.2 В основе перпендикулярности прямых и плоскостей на чертеже положена теорема о прямом угле: Если одна из сторон прямого угла параллельна плоскости проекций, а вторая ей не перпендикулярна, то на эту плоскость прямой угол проецируется без искажения. 1. Прямая перпендикулярна плоскости, если она перпендикулярна двум пересекающимся прямым плоскости. Такими прямыми на эпюре выбираются пересекающиеся линии уровня плоскости (горизонталь, фронталь, профильная прямая). Тогда проекции перпендикуляра будут перпендикулярны соответствующим проекциям линий уровня плоскости (Г1h1; Г2f2; Г3p3). 2. Две плоскости взаимно перпендикулярны, если в одной из них возможно провести прямую, перпендикулярную к другой плоскости. 3. Две прямые взаимно перпендикулярны, если одна из них лежит в плоскости, перпендикулярной второй прямой (если через одну из них можно провести плоскость, перпендикулярную второй прямой). 6.1. Задачи 6.1.1. Построить проекции равнобедренного ∆ АВС, если СМ (СМ 1) высота А 1; В 2. 33 M2 C2 x M1 C1 6.1.2. Построить проекции ромба АВСD, если АС (АС 2) диагональ ромба, В 1; D – равноудалена от плоскостей 1 и 2 . A2 C2 x A1 C1 6.1.3. Построить проекции ∆ АВС с прямым углом при вершине А, гипотенуза ВС которого лежит на прямой l. A2 l2 B2 x B1 l1 A1 6.1.4. Через точку А провести проекции прямой, перпендикулярной к плоскости (fh). f2 x h2 A2 f1 A1 h1 6.1.5. Через точку А провести проекции прямой, перпендикулярной к плоскости ∆ (АВС). 34 B2 A2 C2 x B1 A1 C1 6.1.6. Через точку К провести проекции перпендикуляра к плоскости (аb). K2 a2 b2 x a1 K1 b1 6.1.7. Через точку А провести проекции плоскости, перпендикулярной к прямой ВС. A2 B2 C2 x B1 A1 C1 6.1.8. В точке М пересечения медиан (центр тяжести) ∆ АВС провести перпендикуляр к его плоскости. 35 B2 A2 C2 A1 C1 B1 7. МНОГОГРАННИКИ Если все точки линии принадлежат поверхности, то линия принадлежит поверхности. Если точка принадлежит линии, а линия поверхности, то точка принадлежит поверхности. 7.1. Задачи 7.1.1. Построить недостающие поверхностям геометрических фигур. проекции точек, принадлежащих A2 A2 M2 D2 A2 B2 F2 M2 G2 E2 C2 B2 N2 A1 A1 S2 K2 B2 C2 A1 C2 G2 H2 C1 C1 B1 B1 E2 F1 N1 B1 D1 L1 S1 C1 36 7.1.2. Построить недостающие проекции линий, принадлежащих поверхностям геометрических фигур. S2 B2 A2 12 C2 22 42 A2 A1 52 32 B2 A2 32 22 62 B2 12 41 C2 A1 A1 S1 C1 C 1 71 61 B1 B1 C2 C1 51 B1 7.1.3. Построить линию пересечения пирамиды с плоскостью. S2 A2 B2 S2 A2 A1 B2 C2 A1 C1 S1 B1 1 B1 C2 w 1 C1 S1 7.1.4. Построить линию пересечения плоскости с геометрическими фигурами. 37 h2 B2 A2 A1 S2 h2 f2 C2 C1 f2 B2 A2 S1 h1 C2 B1 C1 h1 B1 f1 A1 f1 7.1.5. Построить точки пересечения прямой с геометрическими фигурами. S2 l2 A2 B2 A2 C2 A1 B1 C1 l2 l1 l1 C2 B2 D2 B1 S1 A1 D1 C1 7.1.6. Построить линию пересечения двух многогранников и определить видимость. 38 A2 B2 S2 C2 N2 M2 K2 C1 N1 K1 A1 S1 M1 B1 S2 E2 K2 F2 C2 A2 A1 B2 B1 S1 K1 C1 E1 F1 8. СПОСОБЫ ПРЕОБРАЗОВАНИЯ КОМПЛЕКСНОГО ЧЕРТЕЖА Способы преобразования комплексного чертежа позволяют преобразовывать прямые и плоскости общего положения в частное положение относительно плоскостей проекций, что облегчает решение позиционных и метрических задач. 39 8.1. Способы замены плоскостей проекций Этот способ заключается в замене одной из заданных плоскостей проекций новой, перпендикулярной к оставляемой плоскости проекций. При этом сохраняется принцип ортогональности: линии связи в новой системе плоскостей перпендикулярны новой оси. Если замена одной плоскости проекций недостаточна, то прибегают к последовательной замене обеих плоскостей проекций. 8.1.1. Замена одной плоскости проекций Пусть дана точка А проекциями А1 и А2 на плоскостях 1 и 2 . Введем новую плоскость 4 , перпендикулярную горизонтальной плоскости проекций 1 и на ней получим новую проекцию точки А4 (рис. 8.1). Очевидно, что расстояние новой проекции А4 от новой оси х14 равно расстоянию фронтальной проекции А2 от оси х12. На эпюре после совмещения плоскости 4 с плоскостью 1 новая 2 A2 A2 A4 õ12 A 1 4 A1 õ12 õ14 2 1 A1 проекция А4 располагается на линии связи, перпендикулярной новой оси х14, причем расстояние от новой оси х14 до новой проекции А4 равно расстоянию от заменяемой оси х12 до заменяемой проекции А2. A4 4 1 õ 14 Пример: Определить истинную величину отрезка АВ способом замены плоскостей проекций (рис. 8.2) 40 õ12 2 B2 A2 1 B1 A1 1 õ14 4 A4 B4 Рис. 8.2 Заменим плоскость 2 на плоскость 4 , перпендикулярную 1 и параллельную заданному отрезку АВ. При этом новая ось х14 займет положение, параллельное горизонтальной проекции АВ. Символическая запись преобразования: х12 2 х14 4 ; 4 // AB (на эпюре х14//A1B1). 1 1 Через концы отрезка A1B1 проведем линию связи, перпендикулярную новой оси и отложим на них отрезки, равные расстоянию точек A2 и В2 от оси х12. Полученная проекция A4B4 является натуральной величиной отрезка AB. 8.1.2. Замена двух плоскостей проекций В том случае, когда одной заменой плоскостей проекций не удается достичь желаемого частного положения геометрического объекта относительно плоскостей проекций, производят две последовательные замены плоскостей проекций. Например, преобразование отрезка прямой общего положения в проецирующую прямую возможно в результате двух следующих преобразований (рис. 8.3). 1) 2) х12 2 х14 4 ; 1 1 х14 4 х 45 4 ; 1 5 4 // AB (на эпюре х14//A1B1). 5 // AB (на эпюре х45//A4B4). 41 A2 õ12 2 B2 1 B1 A1 B4 1 õ14 4 A4 4 õ 45 5 A5 B5 Рис. 8.3 8.1.3. Задачи 5.1.3.1. Найти горизонтальную проекцию отрезка AB, длина которого 45 мм. A2 B2 õ12 B1 8.1.3.2. Найти фронтальную проекцию точки горизонтали h на 20 мм. h2 õ12 h1 K1 К1, отстоящей от 42 8.1.3.3. Определить расстояние от точки М до плоскости (АВС). B2 M2 C2 õ12 A2 B1 A1 C1 M1 2 . 8.1.3.4. Определить углы наклона прямой АВ к плоскостям проекций 1 и A2 B2 õ12 B1 A1 8.1.3.5. Определить расстояние между параллельными плоскостями ( a b ) и ( c d ) . c2 a2 d2 b2 õ12 a1 c1 b1 d1 43 8.1.3.6. Определить углы наклона плоскости (АВС) к плоскостям проекций 1 и 2 . B2 õ12 C2 A2 B1 A1 C1 8.1.3.7. Определить расстояние между параллельными прямыми a и b. a2 b2 õ12 a1 b1 8.1.3.8. Определить расстояние от точки М до прямой а. M2 a2 õ12 M1 a1 8.1.3.9. Построить проекции прямоугольного равнобедренного АВС, катет АВ которого принадлежит прямой а. Угол при вершине А – прямой. 44 C2 a2 õ12 C1 a1 8.1.3.10. Найти горизонтальную проекцию точки D, равноудаленной от вершин заданного треугольника АВС. B2 A2 D2 C 2 õ12 B1 A1 C1 8.1.3.11. Найти горизонтальную проекцию прямой СD, параллельной прямой АВ, если известно, что расстояние между ними равно 20мм. Указать количество решений. A2 C2 B2 õ12 B1 A1 D2 45 8.1.3.12. Провести прямую m, параллельной двум заданным прямым а и b и удаленную от прямой a на 20мм и от прямой b на 15мм. Указать количество решений. b2 a2 õ12 b1 a1 8.1.3.13. Построить проекции квадрата ABCD по данной его стороне АВ и направлению а2 фронтальной проекции смежной с АВ стороны АD. a2 A2 B2 õ12 A1 B1 8.2. Способ вращения Способ вращения заключается в том, что геометрический объект вращают вокруг некоторой оси до требуемого положения относительно плоскостей проекций. При этом все точки объекта описывают дуги окружностей в плоскостях, перпендикулярных оси вращения. Центры этих дуг располагаются на оси вращения, а радиусы равны кратчайшему расстоянию от вращаемых точек до оси. Оси вращения располагают параллельно или перпендикулярно одной из плоскостей проекций. 8.2.1. Способ вращения вокруг линии уровня Этот способ применяется для определения натуральной величины плоских фигур и углов. Геометрический объект вращается вокруг линии уровня до положения, параллельного одной из плоскостей проекций. 46 B2 A2 02 z Например, вращением вокруг горизонтали плоскость общего положения, заданную АВС, преобразуем в горизонтальную плоскость уровня (рис. 108). В качестве оси вращения выберем сторону АВ, являющуюся горизонталью и повернем АВС до совмещения с горизонтальной плоскостью, проходящей через сторону АВ (горизонталь). C2 h2 õ A1 C1 B1 z C0 01 1 C1 h1 Так как, вершины А и В принадлежат оси вращения, они при вращении неподвижны. Рассмотрим вращение точки С. 1. Через точку С проведем плоскость ее вращения – горизонтальнопроецирующую плоскость , перпендикулярную горизонтали (оси вращения). 2. Отметим центр вращения 0 точки А, как точку пересечения плоскости и горизонтали. 3. Определим радиус вращения точки С: проекции 01С1, 02С2 и натуральную величину радиуса 01С0 (определяется методом прямоугольного треугольника). 4. Находим новую проекцию вершины С (точку C1 ), которая расположится в плоскости вращения на расстоянии 01С0 от горизонтали (так как плоскость АВС вращается до положения горизонтальной плоскости, все прямые в ней изображаются в натуральную величину, в том числе и отрезок 0С). 5. Соединив точки А1, В1 с точкой C1 найдем натуральную величину АВС. 47 8.2.2. Вращение вокруг проецирующей прямой 2 A2 02 i R A2 2 0 2 õ A R i2 02 0 1= i1 01 =i 1 1 A1 A1 R i2 Рис. 8.2.2.1 Пусть точка А вращается вокруг оси i, перпендикулярной горизонтальной плоскости проекции (рис. 91). Вращаясь, точка А будет описывать окружность в плоскости, перпендикулярной оси вращения и, следовательно, параллельной горизонтальной плоскости проекций π1 . Поэтому на плоскость π1 эта окружность спроецируется без искажений, а на плоскость π 2 - в виде отрезка, параллельного плоскости π1 . Таким образом, при вращении точки вокруг проецирующей прямой на плоскости перпендикулярной оси вращения, проекция точки перемещается по дуге окружности, а на плоскости, параллельной оси вращения - по прямой линии, параллельной оси ox. Вращение прямой линии и плоскости сводится к вращению на один и тот же угол двух точек, принадлежащих прямой, а вращение плоскости – трех ее точек, не лежащих на одной прямой. Пример 1: Повернем прямую общего положения АВ до положения горизонтали. Выберем ось вращения i, проходящую через точку А и перпендикулярную плоскости π 2 . В этом случае достаточно повернуть точку В, так как точка А является неподвижной. Фронтальная проекция точки В вращается по дуге окружности радиуса А2В2 до положения, параллельного оси ox, горизонтальная проекция перемещается по линии, параллельной оси ox. Новая горизонтальная проекция A1B1 отражает натуральную величину отрезка АВ, а угол между A1B1 и осью ox – угол наклона АВ к плоскости π 2 . 48 i2 A2 B2 B2 õ B1 B1 A1 i1 Рис. 8.2.2.2 Пример 2: Повернем плоскость общего положения (АВС) до положения, перпендикулярного плоскости π 2 . Горизонталь фронтально-проецирующей плоскости является фронтальнопроецирующей прямой. Поэтому в плоскости проведем горизонталь h и повернем ее вокруг горизонтально-проецирующей оси i до положения, перпендикулярного плоскости π 2 . Ось вращения проведем через вершину А, следовательно она при вращении остается неподвижной и достаточно повернуть две другие вершины АВС на одинаковый угол. Учитывая, что при вращении горизонтальная проекция не изменяется по виду и величине, находим новую проекцию вершины В на дуге радиуса А1В1 на расстоянии 11В1 от нового положения точки 11 . Точка C1 лежит на пересечении дуги радиуса А1С1 и продолжения прямой B1 11 . Фронтальные проекции точек В и С перемещаются по линиям параллельным оси ox, до пересечения с соответствующими линиями связи от точек B1 и C1 . Новая фронтальная проекция АВС ( B2 A2C2 ) позволяет определить угол наклона плоскости к плоскости 1 . 49 B2 B2 i2 12 h2 h2 A2 C2 õ C2 A1 i1 B1 B1 C1 11 h1 11 h1 C1 Рис. 8.2.2.3 8.2.3. Способ плоско-параллельного перемещения Способ плоско- параллельного перемещения является частным случаем способа вращения (способа вращения без указания на чертеже проецирующих осей). Как было показано ранее, при вращении вокруг проецирующей оси проекция геометрического объекта на плоскость, перпендикулярную оси вращения, не изменяется по виду и величине, а меняется лишь положение этой проекции относительно оси вращения (см. рис. 110, 111). На плоскости, параллельной оси вращения, все точки этой проекции перемещаются по линиям параллельным оси ox. Исходя из этого, можно не задавать ось вращения и не определять радиус вращения, и выполнять преобразование руководствуясь следующими положениями: - одну проекцию перемещают в требуемое положение, не изменяя его формы и величины; - на другой проекции точки перемещают по прямым, параллельным оси ox. Такое преобразование носит название способа плоско- параллельного преобразования. 50 Например, переместим АВС, расположенный в плоскости общего положения, с целью получения натурального вида этого треугольника (рис. 8.2.3.1). B2 B2 B2 C2 A2 12 h2 C2 A2 A2 C2 õ A1 A1 A1 C1 11 B1 h1 B1 B1 11 C1 h1 C1 Рис. 8.2.3.1 Задача решается двумя последовательными преобразованиями. 1. Повернем плоскость АВС так, чтобы он занял фронтальнопроецирующее положение. Горизонталь АВС расположим перпендикулярно оси ox на свободном поле чертежа и построим новую горизонтальную проекцию A1B1C1 A1B1C1 . Это можно сделать, используя равенство отрезков A1B1 A1B1 , 11 B1 11 B1 , B1C1 B1C1 . Фронтальные проекции точек А,В,С перемещаются по прямым параллельным оси ox и новые проекции A2 , B2 , C2 находятся на соответствующих линиях связи с проекциями A1, B1, C1 . 2. Повернем треугольник АВС до горизонтально положения. Для этого фронтальную проекцию A2 B2C2 повернем до положения, параллельного оси ox, сохраняя форму и величину этой проекции ( A2 B2C2 A2 B2C2 ) и расположим на свободном поле чертежа. Горизонтальные проекции точек перемещаются по прямым, параллельным оси ox. Полученная проекция A1B1C1 - натуральная величина АВС. 51 8.2.4. Задачи Задачи 8.2.4.1 – 8.2.4.4 ориентированны на метод решения способом вращения вокруг линии уровня, а остальные на способ вращения вокруг проецирующей прямой и плоско- параллельного перемещения. 8.2.4.1. Определить натуральную величину АВС вращением вокруг фронтали. B2 A2 C2 õ12 A1 B1 C1 8.2.4.2. Определить натуральную величину угла между прямыми а и b. a2 b2 A2 õ a1 A1 b1 52 8.2.4.3. Определить натуральную величину параллелограмма ABCD. B2 A2 C2 D2 õ B1 C1 A1 D1 8.2.4.4. Построить проекции квадрата ABCD, вершина D которого лежит на прямой а. Определить натуральную величину квадрата. a2 õ B2 A2 a1 A1 B1 8.2.4.5. Определить расстояние от точки D до плоскости (ABC). 53 B2 D2 õ C2 A2 B1 C1 A1 D1 8.2.4.6. Найти центр описанной вокруг АВС окружности. B2 C2 õ A2 B1 C1 A1 8.2.4.7. Определить угол наклона прямой AD к плоскости АВС. 54 B2 C2 D2 A2 õ B1 C1 D1 A1 8.2.4.8. Повернуть точку М вокруг оси i до совмещения с плоскостью (ABC). B2 i2 M2 A2 C2 õ A1 C1 B1 i1 M1 8.2.4.9. Плоскость (ABC) повернуть вокруг оси i таким образом, чтобы точка М оказалась в этой плоскости. 55 B2 i2 K2 A2 C2 õ B1 i1 K1 A1 C1 8.2.4.10. Построить проекции квадрата ABCD, вершина D, которого принадлежит прямой а. B2 a2 õ A2 A1 B1 9. КРИВЫЕ ПОВЕРХНОСТИ. ТОЧКИ НА ПОВЕРХНОСТЯХ В начертательной геометрии поверхность рассматривают как геометрическое место последовательных положений линии (образующей), движущейся в пространстве по определенному закону. Кривые поверхности по виду образующей можно разделить на два класса: - линейчатые, образующая которых является прямая линия; - нелинейчатые, образованные движением кривой. 56 К линейчатым поверхностям относятся, например: - конические – прямолинейная образующая проходит через вершину конической поверхности и последовательно все точки некоторой кривой (направляющей). - цилиндрические – прямолинейная образующая во всех своих положениях параллельна некоторой заданной прямой и последовательно проходит через все точки некоторой кривой (направляющей). - винтовые – прямолинейная образующая проходит последовательно через все точки пространственной кривой – винтовой линии и пересекает ось винтовой линии под постоянным углом. На рис. 9.1 приведены примеры некоторых линейчатых поверхностей: конуса (а), цилиндр (б), прямой геликоид (в). i2 S2 i2 B2 À2 12 M2 S1 12 12 À1 m2 11 i1 B1 i1 11 а) б) Рис. 9.1 M1 11 m1 в) При вращении образующей вокруг неподвижной оси получается поверхность, называемая поверхностью вращения. Каждая точка этой поверхности описывает около оси окружность, следовательно, любая плоскость, перпендикулярная оси вращения, пересечет поверхность вращения по окружности с центром на этой оси. Эти окружности называются 57 параллелями (рис. 9.2). Наибольшую из параллелей называют экватором, наименьшую – горлом. Плоскость, проходящая через ось поверхности вращения называется меридиональной, а линия пересечения этой плоскости с поверхностью вращения – меридианом поверхности. Если ось поверхности вращения перпендикулярна плоскости 1, то меридиан, лежащий во фронтальной плоскости называется фронтальным меридианом, а в профильной, соответственно, профильным меридианом. На рис. 9.3. приведены некоторые поверхности вращения: конус вращения (а), цилиндр вращения (б), сфера (в). Если точка лежит на поверхности, то проекции точек принадлежат линиям поверхности. На рис. 9.1 (а) точка А на поверхности конуса лежит на образующей S1, соединяющей вершину S с точкой на основании 1. На рис. 9.1 (б) точка В на поверхности цилиндра лежит на образующей, проходящей через точку 1 и параллельной оси круговых сечений i. На рис. 9.1. (в) точка М на винтовой поверхности лежит на образующей, соединяющей точку 1 винтовой линии m с осью i и проходящей параллельно плоскости 1. На рис. 9.3. (а, б, в) точки А, В, С на соответствующих поверхностях лежат на параллелях этих поверхностей, а точки M и N на фронтальных меридианах (очерковых линиях) конуса и сферы соответственно. ô ðî í ò àëüí û é ì åðèäèàí R ãî ðëî ýêâàò î ð R Рис. 9.2 ï àðàëëåëü 58 Ì À2 Ì Â2 2 N2 C2 N1 1 À1 Â1 а) б) Рис. 9.3 C1 в) 9.1. Задачи 9.1.1. Построить проекции цилиндра, заданного его основанием и горизонтальной проекцией образующей А1В1. Точка М лежит на поверхности цилиндра. M2 õ A1 M1 B1 9.1.2. Построить проекции сферы, если даны проекции центра сферы 0 и точки М, лежащей на этой сфере. 59 02 M2 õ M1 01 9.1.3. Построить проекции конуса вращения с вершиной в данной точке S и основанием лежащим в плоскости ( 1 ) . Радиус основания равен высоте конуса. S2 õ 1 S1 9.1.4. Построить проекции конуса вращения, ось которого лежит на прямой а. Высота конуса равна l, окружность основания касается плоскости 1 . S2 l õ S1 a1 9.1.5. Найти недостающие проекции точек A,B,C,D на поверхности сферы (а); M,N,P на поверхности цилиндра (б); E,F,K,L на поверхности тора (в). 60 i2 i3 M2 Â2 03 02 P3 Ñ2 D1 01 À1 i1 N1 á) a) i2 L2 F2 K1 E1 â) 9.1.6. Построить фронтальную проекцию линии АВ на поверхности конуса вращения (а); горизонтальную проекцию линии MN на поверхности наклонного цилиндра (б); горизонтальную и профильную проекции линий АВС на поверхности сферы (в). 61 Ì i2 i2 2 N2 i1 Â1 i1 À1 á) à) i2 A2 B2 z C2 õ y y â) 9.1.7. Поворотом вокруг оси i точку А совместить с поверхностью сферы (а), а точку В- с поверхностью тора (б). 62 Â2 i2 À2 i2 02 i1 01 À1 a) Â1 i1 á) 10. ПЕРЕСЕЧЕНИЕ КРИВЫХ ПОВЕРХНОСТЕЙ ПЛОСКОСТЬЮ Для построения линии пересечения поверхности плоскостью в общем случае применяется метод вспомогательных секущих плоскостей. Точки искомой линии определяются, как точки пересечения линий, по которым вспомогательные секущие плоскости пересекают данные поверхность и плоскость. При подборе вспомогательных плоскостей необходимо стремится к упрощению построений. Предпочтение следует отдавать проецирующим плоскостям, пересекающим заданную поверхность по возможно более простым линиям. Важен также правильный и последовательный порядок построения особых точек проекций сечения: - высшей и низшей точек сечения (они принадлежат меридиану, перпендикулярному секущей плоскости); - точек касания проекций сечения к проекциям видимого контура кривой поверхности, если такие имеются (границы видимости); - точек наиболее и наименее удаленных от плоскостей проекций. На рис. 10.1. изображено тело вращения, срезанное плоскостью, заданной трапецией ABCD. Для построения точек кривых линий, получаемых на поверхности, применены вспомогательные горизонтальные плоскости, пересекающие поверхность по параллелям, а плоскость по горизонталям. 63 C2 Â2 2 12 D'2 A'2 M 2 02 N2 D2 A2 C1 Â1 11 D'1 D1 N1 M1 A'1 A1 Рис. 10.1. Рассмотрим для примера одну из них ( 2 ) . Поверхность вращения эта плоскость пересекает по параллели- окружности радиуса 0212, а плоскость ABCD по горизонтали A’D’//AD. В пересечении параллели и горизонтали находим точки M и N, принадлежащие одновременно и поверхности вращения и плоскости, следовательно, являющиеся точками искомой линии пересечения. Повторяя этот прием получим ряд точек, определяющих криволинейную часть линии среза. Плоские грани данного тела вращения срезаны плоскостью ABCD по прямым AB и CD. Решение задачи существенно упрощается, если поверхность пересекается проецирующей плоскостью. На рис. 10.2. показано построение линии пересечения самопересекающегося тора и фронтально-проецирующей плоскости . Фронтальная проекция линии пересечения совпадает со следом проекцией плоскости между опорными точками А и В, лежащими на фронтальном очерке тора, а 64 горизонтальная проекция определяется по принадлежности точек этой линии поверхности тора (так как тор является поверхностью вращения- по принадлежности их соответствующим параллелям и меридианам). Построение i2 12 2 B2 02 E2 F2 C2 D2 M2 N2 K2 L2 A2 N1 F1 D1 L1 Â1 i1 A1 C1 K1 M1 E1 Рис. 10.2. начинаем с определения особых точек: высшей и низшей точек А и В, и точек, лежащих на горизонтальном очерке M и N (границ видимости). Фронтальные проекции точек А и В лежат на фронтальном очерке, следовательно, их горизонтальные проекции А1 и В1 лежат на горизонтальной осевой линии. Точки M и N принадлежат экватору тора, следовательно, их горизонтальные проекции лежат на горизонтальном очерке тора и отделяют зону видимости линии пересечения (от точки В до точек M и N) от невидимой части кривой. Для нахождения промежуточных точек используем параллели соответствующего радиуса, на которых лежат точки пересечения. Например, 65 точки С и D лежат на параллели радиуса 0212. Проведя горизонтальную проекцию этой параллели, проецируем на нее точки С и D. Аналогично определяются горизонтальные проекции других промежуточных точек (E,F,K,L). Соединив полученные точки на горизонтальной проекции в той же последовательности, как они соединены на фронтальной проекции, с учетом видимости получаем горизонтальную проекцию линии пересечения. При пересечении поверхности плоскостью общего положения, способом преобразования чертежа можно плоскость преобразовать в проецирующую и решение задачи свести к решению, аналогичному рассмотренному выше. 10.1. Задачи 10.1.1. Построить недостающую проекцию цилиндра вращения и построить его сечение плоскостью ( 3 ) . z 3 x y y 10.1.2. Построить сечение заданного цилиндра плоскостью ( 1 ) . 66 1 10.1.3. Построить профильную проекцию цилиндра и его сечение горизонтальными и профильными плоскостями. z x y y 67 10.1.4. Рассечь данный цилиндр плоскостью, параллельной его оси и наклоненной к плоскости 2 под углом 450 так, чтобы сечение было равновелико данному квадрату. Указать количество решений. 10.1.5. Построить проекции и натуральную величину сечения цилиндра плоскостью , заданной пересекающимися прямыми h и f. h2 f2 f1 h1 68 10.1.6. Построить проекции и натуральную величину сечения конуса вращения плоскостью ( 1 ) . 1 10.1.7. Построить сечение конуса плоскостью ( 2 ) . S2 2 S1 69 10.1.8. Дана прямая а1 лежащая в основании конуса. Построить плоскость , проходящую через эту прямую, и рассекающую конус по параболе. Построить проекции сечения. S2 a2 S1 1 10.1.9. Построить проекции и натуральную величину сечения конуса плоскостью , заданной пересекающимися прямыми h и f. h2 S2 f2 f1 S1 h1 70 10.1.10. Построить горизонтальную и профильную проекции сечения конуса вращения горизонтальными и фронтально- проецирующими плоскостями. 10.1.11. Построить сечения сферы плоскостью, заданной прямой а и точкой А на поверхности сферы. A2 a2 a1 71 10.1.12. Построить на сфере кратчайшее расстояние между точками А и В на ней. A2 B1 10.1.13. Построить горизонтальную и профильную проекции сечения сферы горизонтальными и профильными плоскостями. z x y y 10.1.14. Построить проекции и натуральную величину сечения тора плоскостью ( 2 ) . 72 2 11. ПЕРЕСЕЧЕНИЕ ПРЯМОЙ ЛИНИИ С ПОВЕРХНОСТЬЮ Для определения точек пересечения прямой линии и поверхности, как правило, пользуются вспомогательной секущей плоскостью, проходящую через данную прямую. Точки пересечения прямой с полученной фигурой сечения являются искомыми точками пересечения прямой с поверхностью. Очевидно, что вспомогательную секущую плоскость нужно выбирать так, чтобы проекция сечения представляла по возможности графически простые линии: прямые или окружности. Например, при определении точек пересечения прямой l c поверхностью цилиндра (рис. 11.1.) следует выбирать секущую плоскость , заданную прямой l и пересекающейся с ней прямой m, параллельно образующим цилиндра. Эта плоскость пересекает цилиндр по его образующим. Для определения этих образующих найдем горизонтальный след MN плоскости . Отметим точки 1 и 2 пересечения следа MN с основанием цилиндра (оно расположено в горизонтальной плоскости 1 ). Через эти точки проведем горизонтальные проекции образующих 11’ и 22’ и на пересечении этих образующих с горизонтальной проекцией заданной прямой l найдем искомые точки А и В пересечения прямой l с поверхностью цилиндра. 73 m2 l2 Â2 C2 A2 N2 M2 N1 21 11 M1 A1 C1 Â1 2'1 l1 m1 1'1 Рис. 11.1 Для определения точек пересечения прямой l c поверхностью сферы (рис. 11.2.) выбираем вспомогательную горизонтальную плоскость 2 , пересекающую сферу по окружности радиуса 0’212. На пересечении горизонтальной проекции этой окружности с горизонтальной проекцией прямой l определяем искомые точки пересечения А и В. Когда нет возможности провести секущую плоскость так, чтобы она рассекала данную поверхность по графически простым линиям, тогда через заданную прямую проводят проецирующую секущую плоскость и строят фигуры сечения по правилам, изложенным в разделе 10 (см.рис. 10.2.) 74 l2 2 1'2 A2 0'2 Â2 02 Â1 A1 01 l1 Рис. 11.2 11.1. Задачи 11.1.1. Определить точки пересечения прямой m с поверхностью сферы. m2 m2 m1 m1 a) б) 75 11.1.2. Определить точки пересечения прямой m с поверхностью цилиндра. m2 B2 m2 m2 A2 A1 m1 m1 m1 B1 а) б) в) 11.1.3. Определить точки пересечения прямой m с поверхностью конуса. m2 m2 m2 x m1 m1 m1 а) б) в) 11.1.4. Определить точки пересечения прямой m с поверхностью тора. 76 m2 m1 11.1.5. Определить кратчайшее расстояние от точки М до поверхности конуса (а) и от точки А до поверхности цилиндра (б). M2 À2 x À1 M1 а) б) 12. ПЕРЕСЕЧЕНИЕ ПОВЕРХНОСТЕЙ 12.1. Пересечение кривой поверхности с гранной Линия пересечения кривой поверхности с многогранником состоит из плоских кривых, каждая из которых получается в результате сечения кривой поверхности одной из граней многогранника. Точки, в которых эти плоские кривые соединяются друг с другом, являются точками пересечения ребер многогранника с кривой поверхностью. Таким образом, задача на построение линии пересечения кривой поверхности с многогранником может быть сведена к задачам на пересечение 77 кривой поверхности с плоскостью (см. раздел 10) и прямой линией (см. раздел 11). 12.2. Взаимное пересечение кривых поверхностей Линия пересечения двух поверхностей в общем случае представляет собой пространственную кривую. Эту линию строят по отдельным ее точкам. Общим способом построения этих точек является метод вспомогательных секущих плоскостей, который заключается в следующем. Пересекая данные поверхности некоторой вспомогательной поверхностью, определяют линии пересечения ее с данными поверхностями. В пересечении этих линий находят точки, принадлежащие искомой линии пересечения. Наиболее часто в качестве вспомогательных поверхностей применяются плоскости и сферы. Секущие поверхности выбираются таким образом, чтобы они пересекали заданные поверхности по графически простым линиям (прямым или окружностям). Построение начинают с опорных точек, к которым относятся экстремальные точки (точки, самые близкие и наиболее удаленные от плоскостей проекций) и точки видимости (точки, лежащие на контурной линии поверхности). После этого определяют достаточное число произвольных точек. 12.2.1. Способ вспомогательных секущих проецирующих плоскостейпосредников Этот способ применяется для построения линии пересечения двух поверхностей в том случае, когда вспомогательные секущие плоскости дают в пересечении с каждой из данных поверхностей такие линии, как прямые или окружности. Пример. Построить линию пересечения кругового конуса Ф(i,l) со сферой Ф(i’,m) (рис. 12.1). Для построения линии пересечения в этом случае могут быть использованы в качестве посредников горизонтальные плоскости уровня, которые пересекают и конус и сферу по окружностям. Начинаем с опорных точек. Для определения точек, лежащих на экваторе сферы е (точек видимости) вводим секущую плоскость- посредник ( 2 ) , проходящую через экватор сферы. Эта плоскость пересекает сферу по экватору е, а конус- по окружности f радиуса r. Горизонтальные проекции этих окружностей пересекаются в точках А1 и А’1, после этого строим фронтальные проекции точек А2 и А’2. 78 Для определения экстремальных точек используется иная секущая плоскость, а именно: параллельная плоскости 2 и являющаяся общей для обеих фигур плоскостью симметрии ( 2 ) . Она пересекает сферу по главному меридиану m, а конус- по очерковым образующим l, l . В пересечении этих линий на фронтальной проекции определяем точки В2 и С2. Затем находим горизонтальные проекции точек В1 и С1: Ф l1l ; Ф' m ; m l B ,C . Далее определяем нужное число промежуточных точек, находящихся между точками В и С. Вновь применяя при этом секущие плоскости уровня, параллельные плоскости ( 2 ) . С помощью плоскости ( 2 ) найдены точки D и D’. Алгоритм нахождения точек D и D’ следующий: 1. Ф a , где а- окружность радиуса . 2. Ф b , где b- окружность радиуса . Горизонтальные проекции этих окружностей пересекаются в точках D1 и D’1, фронтальные проекции находятся на следе проекции 2 . Для определения следующей пары промежуточных точек E и E’ проведена секущая плоскостьпосредник ( 2 ) . Соединив полученные точки по лекалу, получим проекции линии пересечения поверхностей. Видимость на горизонтальной проекции линии пересечения определяется на двух участках, границами которых служат точки А1 и А’1. Участок А1В1А’1 будет видимым, так как промежуточная точка В1 видимая, следовательно, участок А1С1А’1- невидимый. 79 i2 m2 i'2 Â2 r D2 D' 2 a2 b2 2 A2 A'2 f2 e2 2 E2 E'2 e2 -ô ðî í ò. ï ðî åêö. ýêâàòî ðà ñô åðû 2 l'2 l2 C2 b1 A'1 D'1 E'1 f1 a1 i1 l1 C1 B1 l1 m1 1 i'1 r D1 A1 E1 e1 -ãî ð. ï ðî åêö. ýêâàòî ðà ñô åðû Рис. 12.1 12.2.2. Способ концентрических сфер- посредников Способ концентрических сфер- посредников для построения линии пересечения поверхностей можно использовать при наличии следующих условий: 1. Обе поверхности должны быть поверхностями вращения. 2. Оси поверхностей должны пересекаться между собой. 3. Оси поверхностей должны быть параллельны одной из плоскостей проекций. 80 Если последнее условие не выполняется, то путем преобразования чертежа систему приводят в такое положение, при котором плоскость осей становится параллельной какой- либо плоскости проекций. В основе метода концентрических сфер- посредников лежит следующая теорема: две соосные поверхности вращения пересекаются по окружностям, число которых равно числу точек пересечения меридианов поверхностей. Если общая ось этих поверхностей параллельна какой- либо плоскости проекций, то на эту плоскость проекций окружности проецируются прямолинейными отрезками. Предположим, что некоторая поверхность вращения Ф(i,m) пересекается со сферой Ф’(i,n), причем центр сферы находится на оси этой поверхности, то есть сфера будет соосна с поверхностью Ф и в пересечении получатся окружности, которые образуются при вращении точек пересечения меридианов m и n (рис. 10.2). i2 Ô m2 Ô' Òî ÷êè ï åðåñå÷åí èÿ ì åðèäèàí î â mèn n2 02 î êðóæí î ñòè Рис.12.2 План решения задачи способом концентрических сфер- посредников можно сформулировать так: 1. Принимая точку пересечения осей заданных поверхностей за центр, строят вспомогательные сферы- посредники. 2. Сфера- посредник будет соосна каждой из заданных поверхностей, а поэтому пересечет их по окружностям, которые строятся на основании точек пересечения меридианов. 3. Находят общие точки пересечения полученных окружностей. Эти точки и принадлежат искомой линии пересечения поверхностей. Пример. Построить линию пересечения конуса вращения Ф(i,l) c цилиндром вращения Ф’(i’,l’), оси которых параллельны фронтальной плоскости проекций и пересекаются в точке 0 (рис. 10.5). 81 Решение. Из точки 02 как из центра описывают окружность, которая является фронтальной проекцией сферы- посредника (рис. 12.3). Эта сфера соосна как с цилиндром, так и с конусом, и поэтому рассекает их по окружностям, которые на фронтальной плоскости проекций изобразятся отрезками прямых: на цилиндре S2P2 (окружность а) и Н2L2 (окружность в); на конусе M2N2 (окружность m) и K2T2 (окружность n). i2 m2 l2 M2 l'2 i'2 N2 H2 b2 S2 a2 K2 02 12 2 2 n2 32 4 2 T2 L2 P2 n1 i'1 l 1 l' 1 K1 21 i 1 01 41 T1 31 11 Рис. 12.3 На пересечении этих отрезков (окружностей) получают точки 1 2,22,32,42, принадлежащие обеим данным поверхностям и, следовательно, искомой линии 82 пересечения. На фронтальной проекции точки 1 2,32- видимые, а точки 22,42невидимые, так как расположены на невидимой половине поверхности. Для построения горизонтальной проекции точек удобно пользоваться окружностями (в нашем случае окружностью n), полученными на сферахпосредниках, плоскости которых параллельны горизонтальной плоскости проекций. На рис. 12.3 показано построение точек 11, 21, 31, 41. Изменяя радиус вспомогательной сферы, можно получить достаточное количество точек для построения искомой линии пересечения. Однако начинать решение задачи нужно с определения радиуса максимальной и минимальной секущих сфер (рис. 12.4). Для определения радиуса максимальной сферы отмечают точки пересечения очерковых образующих цилиндра и конуса, лежащих в общей плоскости симметрии обеих фигур (на 2 - это точки A2,B2,C2,D2). Радиус Rmax равен расстоянию от точки 02 до самой удаленной точки пересечения очерковых образующих, в нашем случае до точки B2. Итак, Rmax= 02B2 (рис. 12.4). Радиус Rmin наименьшей сферы- посредника должен быть равен радиусу сферы касательной к одной поверхности и пересекающей другую (в нашем случае-касательной к конусу и пересекающей цилиндр). Необходимо определить точки E1,F1,M1,N1 (рис. 12.5), лежащие на горизонтальном очерке цилиндра, так как на горизонтальной проекции они являются точками видимости и отделяют видимую часть кривой от невидимой. C2 A2 02 D2 Rm B2 Rm ax in Рис. 12.4 83 i2 l2 C2 A2 l'2 12 2 2 i'2 02 32 4 2 M 2 N2 E2 F2 D2 B2 21 F1 i'1 l 1 l' 1 B1 N1 A1 i1 01 C 1 11 E1 41 D1 31 M1 Рис. 12.5 12.3. Задачи 12.3.1. Построить проекции линии пересечения сферы и призмы. 84 12.3.2. Построить проекции линии пересечения призмы и цилиндра. 12.3.3. Построить проекции линии пересечения конуса с призмой. 12.3.4. Построить проекции линии пересечения тора и призмы. 85 12.3.5. Построить проекции линии пересечения цилиндра с пирамидой. 12.3.6. Построить проекции вращения. линии пересечения двух цилиндров 12.3.7. Построить проекции линии пересечения цилиндра и конуса вращения. 86 12.3.8. Построить проекции линии пересечения полусферы с цилиндром. 12.3.9. Построить проекции линии пересечения цилиндра вращения с наклонным конусом. 87 12.3.10. Построить проекции линии пересечения цилиндра и конуса вращения. 12.3.11. Построить проекции линии пересечения конуса вращения и самопересекающегося тора. 88 12.3.12. Построить проекции линии пересечения самопересекающегося тора и цилиндра.