Компенсация динамических погрешностей в нейронных сетях
реклама

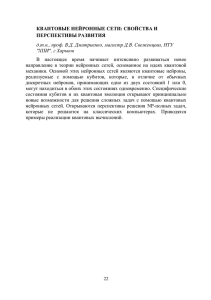
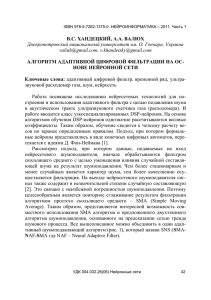
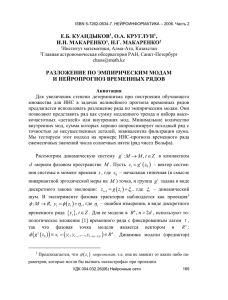
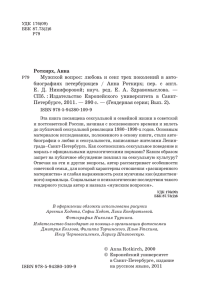
ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 Н.В. СЕЛЕЗНЁВА, К.Е. ЛЕБЕДЕВ Московская государственная академия приборостроения и информатики [email protected] КОМПЕНСАЦИЯ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ В НЕЙРОННЫХ СЕТЯХ БИОДАТЧИКОВ Аннотация В докладе рассматриваются функциональные и математические модели нейронных сетей биодатчиков, в которых осуществляется первичная обработка измерительной информации. Показано, что использование множества измерительных преобразователей (рецепторных клеток), обладающих разными передаточными свойствами (функциональная и адаптивная), позволяет в результате обработки сигнала в нейронных сетях уменьшить динамические погрешности чувствительных элементов биодатчиков и расширить их диапазон измерений. Исследования органов чувств человека и животных выявили определенное противоречие в их свойствах: с одной стороны, получены экспериментальные данные, подтверждающие высокую инерционность чувствительных элементов биодатчиков; с другой стороны, известно, что быстродействие анализаторов животных определяется только сложностью обработки информации в высших отделах головного мозга и мало зависит от динамических свойств их чувствительных элементов [1, 2]. Например, измеритель угловых ускорений в вестибулярном аппарате обладает значительными динамическими погрешностями, в то же время в центральную нервную систему сигналы от этих измерителей поступают практически мгновенно (запаздывание не превышает 0,05 с) [1]. В зрительных аппаратах фоторецепторы являются весьма инерционными элементами с постоянной времени порядка 0,17 с, в то же время от периферической области сетчатки сигналы фоторецепторов достигают соответствующие отделы мозга за сотые доли секунды [1]. Аналогичное явление имеет место в проприоцепторах мышц, тактильных, температурных и других биодатчиках. Очевидно, что компенсация динамических погрешностей измерений в биодатчиках является жизненно важной задачей живых существ. Экспериментальные данные подтверждают, что решается эта задача непосредственно в их нейронных структурах в процессе первичной обработки сигналов. УДК 004.032.26(06) Нейронные сети 106 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 Рассмотрим, каким образом может быть повышено быстродействие биодатчиков, имеющих неоднородные информационные поля ИП и совокупность нейронов, способных складывать и вычитать выходные сигналы этих ИП. Зрительный аппарат. Информационное поле зрительного аппарата млекопитающих (и человека) имеет неравномерное распределение фоторецепторов: центральная область сетчатки включает только усилительные ИП (колбочки), а периферическая – усилительные и адаптивные (палочки), причем последних в 150 раз больше, чем усилительных [3, 4]. Это означает, что основная функциональная роль в периферической области сетчатки принадлежит именно адаптивным фоторецепторам, способным выявлять изменения в наблюдаемой картине местности. Чтобы понять, каким образом в результате первичной обработки информации обеспечивается компенсация динамического запаздывания сигналов в периферической области сетчатки глаза, сравним динамические свойства обеих измерительных структур сетчатки. На рис. 1 представлена структурная схема преобразования информации сетчаткой глаза. На схемах обозначено: 1 и 2 – видеосигналы (световое излучение), поступающие на центральную и периферическую области сетчатки соответственно; чувствительный элемент глаза – зрительный пигмент, который находится внутри светопроводящих волосков 1 фоторецепторов, имеет передаточную функцию [5]: Wз р ( s ) kз р Tз р s 1 , где kзр – коэффициент чувствительности зрительного пигмента к световому излучению; Тзр – постоянная времени процесса поглощения зрительным пигментом квантов света. Нейронные клетки 5 и 6 суммируют выходные сигналы нескольких фоторецепторов в центральной и периферической областях сетчатки соответственно. В нейроны 5 поступают нервные волокна только усилительных фоторецепторов 2, а в нейронах 6 объединяются волокна усилительных 3 и адаптивных 4 фоторецепторов. Передаточные функции колбочек и палочек равны Фк(s)=Ni и Фп(s) = Мj s соответственно. Для центральной области сетчатки сигнал I1 на выходе нейронов 5 определяется выражением: УДК 004.032.26(06) Нейронные сети 107 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 I1 kз р Tз р s 1 n Ni i (1) i 1 где п – количество усилительных фоторецепторов, выходные волокна которых объединяются в одном нейроне, i = 1,2,..., п. Рис. 1. Структурная схема компенсации динамических погрешностей в сетчатке глаза Полагая передаточные свойства всех усилительных фоторецепторов одинаковыми (N1=N2=...=Nn=N), получаем выражение для выходного сигнала центральной области сетчатки I1 n kз р N Tз р s 1 1 . (2) Из (2 2.14) следует, что участие множества усилительных фоторецепторов при восприятии изображения ориентира обеспечивает увеличение коэффициента усиления сигнала управления. Передаточная функция измерительной структуры центральной области сетчатки соответствует инерционному звену (2), вследствие чего постоянная времени зрительного анализатора в режимах распознавания объектов или слежения за движущимися целями составляет не менее 0,17с [1]. Световые сигналы, поступающие на периферическую область сетчатки, воспринимается двумя видами фоторецепторов: усилительными и УДК 004.032.26(06) Нейронные сети 108 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 адаптивными, поэтому для этой области сетчатки сигнал I2 на выходе нейронов 6 равен I1 m n Ni s M j 2 , Tз р s 1 i 1 j 1 kз р (3) где n и m – количество усилительных и адаптивных фоторецепторов, воспринимающих изображение ориентира (i = 1, 2, ..., п; j = 1,2, ..., т). Считаем, что динамические свойства всех палочек и передаточные характеристики всех колбочек одинаковы: М1 = М2 =...= Мm = М; N1 = N2 =...= Nп = = N. Тогда функция преобразования (3 2.15) запишется в виде I1 mM s 1 2 , Tз р s 1 n N n kз р (4) Замечаем, что при выполнении условия mM Tз р nN (5) получится полная компенсация динамических погрешностей измерительной цепи периферической области сетчатки глаза: (6) I2 n kз р N 2 . Таким образом, благодаря наличию адаптивных фоторецепторов в области периферического зрения не только выявляются изменения световых воздействий, но и обеспечивается компенсация инерционности чувствительного элемента глаз. Объединение выходных сигналов определенного количества палочек и колбочек в одном нейронном узле сетчатки создает форсирующее звено с характеристиками, необходимыми для компенсации динамических погрешностей канала измерения. Именно этим свойством можно объяснить сверхбыстрое обнаружение изменений в окружающей обстановке периферическим зрением. Вестибулярный аппарат. Информационное поле вестибулярного измерителя угловых ускорений (полуокружья) включает как усилительные, так и адаптивные механорецепторы; их выходные волокна в разной пропорции направляются в два нейронных узла [6]. Рассмотрим структурную схему измерительной цепи полуокружья, моделирующую его нейронную структуру (рис. 2). На схеме чувствительный элемент 1, воспринимающий измеряемое угловое ускорение, имеет передаточную функцию [7]: УДК 004.032.26(06) Нейронные сети 109 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 W( s ) A , s 2 d 0 s 02 2 (7) Углы поворота чувствительного элемента преобразуют в биосигнал множество усилительных 2 и адаптивных 3 механорецепторов (для простоты полагаем, что их динамические характеристики одинаковые) с передаточными функциями Ф1i(s)=N и Ф2j(s)=Мs соответственно; нейронные узлы 4 и 5 осуществляют первичную обработку сигналов механорецепторов. Рис. 2. Структурная схема компенсации динамических погрешностей в вестибулярном аппарате Суммарные сигналы I1 и I2, полученные на выходах нейронных узлов, равны соответственно: ; (8) I i ( s ) W ( s ) ( ni N mi M s ) i 1,2 , где – угловое ускорение движения головы, регистрируемое полуокружьем; ni и тi – количество усилительных и адаптивных клеток, объединяемых в первом и втором нейронных узлах соответственно, i=1,2. Представим передаточную функцию (7) чувствительного элемента полуокружья в виде произведения инерционных звеньев W( s ) A , ( T1 s 1 )( T2 s 1 ) 2 0 (9) где – постоянные времени. Уравнения (8) с учетом (9) будут иметь вид УДК 004.032.26(06) Нейронные сети 110 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 Ii ( s ) m M A ni N , i s 1 ( T1 s 1 )( T2 s 1 ) ni N 2 0 i 1,2 . (10) Из выражения (10) видно, что при соответствующем подборе количества т и п рецепторов разного вида в одно нервное волокно можно скомпенсировать одно из инерционных звеньев в знаменателе выражений (10): T1 s 1 m1 M n1 N s 1; T2 s 1 m2 M n2 N s 1 . (11) Необходимая комбинация нервных волокон рецепторов и их объединение в двух нервных узлах позволяют выполнить оба равенства (11). Если в нейронных цепях полуокружья выполняются оба условия (11), то в этом случае на выходе биодатчика будут воспроизводиться два сигнала I1(s) и I2(s), равные: I1 ( s ) A n2 N ; ( T1 s 1 ) 2 0 I2 ( s ) A n1 N . ( T2 s 1 ) 2 0 (12) Динамические погрешности I1 и I 2 суммарных сигналов I1 и I2 механорецепторов на выходе нейронных узлов 5 и 6 определяются выражениями: n2 N A 2 d n1 N A s s ; ; (13) I1 I 2 02 ( s 2 d0 ) 02 ( 2 d s 0 ) их амплитудно-частотные характеристики равны соответственно: 1 N 1 ( ) ; N 2 ( ) , 2 2 2 2 4d 4d 1 (14) где 0 – соотношение частоты измеряемого ускорения к частоте собственных колебаний чувствительного элемента биодатчика. На рис. 3 представлены графики функций (14), которые показывают, что выявленный механизм обработки информации в нейронных цепях полуокружий позволяет не только корректировать динамические свойства чувствительного элемента измерителя, но и обеспечивает интегрирование измеряемого сигнала. Вследствие этого полуокружье приобретает способность достаточно точно ( I i I i < 0,1) измерять и угловые ускорения (кривая 1) и угловые скорости (кривая 2). Кроме того, в результате первичной обработки информации в нейронных узлах биодатчика значительно расширяется диапазон его измерений: УДК 004.032.26(06) Нейронные сети 111 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 для угловых ускорений 0 40 (вместо 0 0 ,0025 0 ); для угловых скоростей 0 ,250 (вместо 0 ,250 4 ). Рис. 3. АЧХ динамической погрешности вестибулярного биодатчика после первичной обработки информации Передаточные функции полуокружья по отношению к угловым ускорению и скорости с учетом преобразований и первичной обработки сигналов имеют вид W1 ( s ) где А1 и A1 ; T1 s 1 W 2 ( s ) A 2 , T2 s 1 (15) А 2 – коэффициенты усиления полуокружья, равные А 1 n2 N A ; 02 А 2 n1 N A . 02 (16) Быстрота реакции биодатчика на угловые ускорения определяется постоянной времени T 1 2 d 0 . В первом приближении можно принять d=20; =4Гц, тогда T1 = 0,006 с. Быстродействие полуокружья при определении угловой скорости оценим с помощью его фазочастотной характеристики. Сдвиг фаз между воздействующим ускорением и реакцией полуокружья определяется выражением [8]: (17) tg 1 T2 0 . Полагая углы малыми, получим запаздывание появления сигнала об угловой скорости от полуокружья, равным: УДК 004.032.26(06) Нейронные сети 112 ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 2 0 1 T2 02 , (18) где T2 2 d 0 = 10...20 с. Из выражения (18) видно, что уже при изменениях угловых ускорений головы с частотами 1Гц запаздывание полуокружья при выработке сигнала не превышает 0,05 с. Таким образом, наличие в вестибулярном измерителе множества механорецепторов, имеющих разные передаточные свойства, позволяет реализовать особый способ первичной обработки информации, который дает возможность измерять не только угловое ускорение, но и угловую скорость, оба параметра получать с большим быстродействием и при этом расширить на несколько порядков диапазоны измерений биодатчика. Условиями реализации такого способа первичной обработки информации являются следующие равенства: Т1 = т1 М /п1 N; Т2 = т2 М /п2 N. (19) Выявленный способ первичной обработки информации на уровне рецепторных клеток позволяет по-другому трактовать их адаптацию к постоянному сигналу, а именно: под адаптацией чувствительных органов типа «привыкание» скрывается предварительная обработка информации с целью улучшения передаточных свойств всего анализатора. В результате обработки биодатчик передает в мозг информацию не только о величине и направлении сигнала, но и о различных видах его операционных преобразований. Список литературы 1. Инженерная психология в применении к проектированию оборудования / Под ред. Б.Ф. Ломова. М.: Машиностроение, 1971. 2. Методы инженерно-психологических исследований в авиации / Под ред. Ю.П. Доброленского. М.: Машиностроение, 1975. 3. Демидов В.Е. Как мы видим то, что видим. М.: Знание, 1979. 4. Физиология сенсорных систем / Под ред. А.С. Батуева. Л.: Медицина, 1976. 5. Селезнев В.П., Селезнева Н.В. Навигационная бионика. М.: Машиностроение, 1987. 6. Кехамов А. Дифференциально-диагностические проблемы в отоневролгии. 7. Селезнева Н.В. Биологические информационно-измерительные системы. Часть 1. Получение информации. М.: МГА ПИ, 1997. 8. Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М. Машиностроение, 1983. 9. Селезнева Н.В. Биологические информационно-измерительные системы. Часть 2. Обработка информации, обучение, интеллект. М.: МГА ПИ, 1998. УДК 004.032.26(06) Нейронные сети 113