Горбатенко Дмитрий Сергеевич Золтоев Аюр Александрович Ионов Павел Владимирович Тошев Хидоятулло Раджабович
реклама

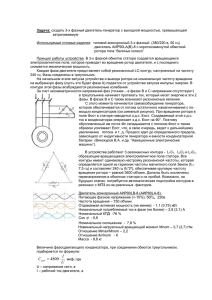
Горбатенко Дмитрий Сергеевич Золтоев Аюр Александрович Ионов Павел Владимирович Тошев Хидоятулло Раджабович Яковлев Константин Владиславович студенты группы ГЭ-1-05 Научный руководитель: Малиновский Анатолий Кузьмич проф., д.т.н. Московский государственный горный университет СОВЕРШЕНСТВОВАНИЕ СИСТЕМЫ ТОРМОЖЕНИЯ ШАХТНЫХ ПОДЪЁМНЫХ МАШИН IMPROVEMENT OF FEEDBACK SYSTEM OF WINDERS Шахтная подъёмная установка (ШПМ) является наиболее ответственным звеном при транспортировке полезного ископаемого, спуске-подъёме людей и т.д. От надежной и безопасной работы ШПМ зависит не только производительность шахты, но и безопасность спускаподъёма обслуживающего персонала. К сожалению ШПМ не оборудована дублирующим тормозом, а поэтому выход из строя предохранительного (механического) тормоза приводит к аварийной ситуации чреватой не только поломкой механического оборудования, но и гибелью людей. Из иностранных источников известно, что только на одной из шахт Великобритании из-за отказа предохранительного тормоза погибло 27 человек [1]. Поэтому для повышения безопасности подъёма необходимо дублирование предохранительного тормоза. Второй предохранительный тормоз поставить невозможно. Поэтому предлагается использовать электрическое торможение, переводя существующий двигатель в тормозной режим. Из известных тормозных режимов пригодным может быть только режим динамического торможения. Учитывая, что современные шахтные подъёмные машины на 95% укомплектованы асинхронными машинами, то в качестве электрического тормоза предлагается рассмотреть использование режима динамического торможения. В настоящее время, как показал анализ технической литературы, существует множество схем динамического торможения. Наиболее полно удовлетворяют требования рабочих машин схемы динамического торможения с фазным ротором С самого начала появления схем ДТ ставился вопрос о снижении потребляемой электроэнергии постоянного тока, необходимой для создания этого режима. Решался этот вопрос сначала за счёт схемы соединения обмоток статора, т.е. изменяя схему соединения обмоток статора, получали различные намагничивающие силы при одном и том же токе возбуждения. В дальнейшем совершенствование схем ДТ шло в направления создания таких схем, в которых вообще отсутствовал внешний источник постоянного тока [2]. Такие схемы получили название схем конденсаторного торможения, в которых конденсатор играет роль накопителя электроэнергии наподобие аккумулятора в момент работы АМ в двигательном режиме. Появление схем конденсаторного торможения в значительной степени повысило эффективность ДТ за счёт ликвидации преобразователей постоянного тока, необходимых для создания тормозного момента и экономии электроэнергии. Разработка схем динамического торможения с самовозбуждением позволяет обеспечить дублирование предохранительного тормоза тормозом электрическим. При исправном предохранительном тормозе появляется режим одновременного действия (РОД) двух тормозов электрического и механического, который до настоящего времени изучен недостаточно. При исследовании РОД двух тормозов необходимо установить следующие зависимости, характеризующие работу механического тормоза. К ним относятся: время торможения ( hт ); путь ( hт ), проходимый подъёмным сосудом за время торможения; скорость ( V ), при которой 0,5 начинается действие предохранительного тормоза; число оборотов барабана (n ), находящегося под действием колодок б.тм предохранительного тормоза; усилие ( Fтм. max ) воздействия тормозных колодок предохранительного тормоза на обод барабан и величина замедления ( a n ). Исследование схемы динамического торможения для АМ с n 740 мин 1 при непосредственном соединении P ном 250 кВт и ном выпрямителя, включённого в цепь ротора, с обмотками статора, показало следующее: время торможения снизилось на 12%; путь торможения снизился на 18%; скорость, при которой начинается действие колодок предохранительного тормоза, снизилась на 10,3%; число оборотов барабана, находящегося под действием колодок предохранительного тормоза, снизилось на 29,2%; усилие воздействия тормозных колодок предохранительного тормоза на обод барабан снизилось на 6%; замедление увеличилось в 1,13 раза. Одновременно необходимо отметить, что незначительное снижение t т , hт , n , Fт.м. max и увеличение a n объясняется малым б.т.м тормозным моментом, создаваемым асинхронной машиной и работающей в режиме ДТ. Это вызвано тем, что ток ротора, а следовательно, и выпрямленный ток ротора, поступающий в обмотки статора и приведенный к переменному току статора, практически одинаков. А его величина всецело определяется активным сопротивлением обмоток статора, которое является значительным. Для рассматриваемой АМ, имеющей активное сопротивление фазы ротора R 1,38 Ом, общее д1 сопротивление обмоток статора составит Rс 2,76 Ом, так как в режиме ДТ две обмотки статора соединены последовательно. Это обстоятельство привело к появлению значительного тока статора, который в 6,55 раз превышает номинальный ток и к незначительному току ротора, составляющему всего 0,671 от номинального тока ротора. Отсюда и незначительный тормозной момент АМ равный 0,713 от номинального момента. Учитывая недопустимость такого тока статора, потребовалось его снижение за счёт включения последовательно обмоткам статора добавочного резистора R , Этот наиболее простой способ снижения тока д1 статора позволяет снизить его, но пропорционально с ним снижается и ток ротора, следовательно, и момент АМ. Такой способ оказался мало эффективным. Дальнейшее снижение тока статора можно достичь включением добавочного резистора Rд 2 параллельно обмоткам статора. По осциллограммам аварийной остановки ШПМ, снятых при различных сопротивлениях резистора R , включённого параллельно д2 обмоткам статора, построены зависимости тока статора I тока ротора I 1 2 от величины сопротивления R* (где R* Rc / Rд2 ). Величина сопротивления Rд 2 варьировалась от Rд2 2,76 Ом до Rд2 0,307 Ом. Обработка осциллограмм позволила построить зависимости I1* , I * f ( R* ) , из которых следует: 2 – снижение величины сопротивления резистора Rд 2 с Rд2 2,76 Ом до Rд2 0,307 Ом величина тока статора снижается с I1* 5,87 до I * 2,19 , т.е. в 2,7 раз; 1 – ток ротор при этом сначала возрастает до величины I * 3,69 , а 2 * затем снижается до величины I 2,18 . Максимальное значение тока 2 ротора приходится на случай, когда в цепь ротора параллельно обмоткам статора включался резистор с сопротивлением R 0,46 Ом. Если за д2 оптимальную величину тока ротора принять область от R 0,552 Ом до д2 R 0,394 Ом, когда ток ротора составляет величину, изменяющуюся от д2 I * 3,545 до I * 3,19 , то величина тока статора будет изменяться от 2 2 I * 4,74 при R 0,552 Ом до I * 4,03 при R 0,394 Ом. 1 1 д2 д2 Дальнейшее снижение тока статора возможно путём введения добавочного резистора R последовательно с обмотками статора и д1 одновременным введением резистора R параллельно обмоткам статора. д2 Интересующие нас показатели аварийной остановки ШПМ улучшаются. А именно: – путь торможения снижается на 33%; – число оборотов барабана снижается на 55%: – скорость снижается на 24%; – время снижается на 32%; – замедление возрастает в 1,3 раза. Основным достоинством РОД двух тормозов является то, что при его реализации не требуется источник постоянного тока, а следовательно электроэнергия не потребляется. В то время как в настоящее расходуется электроэнергия, идущая на создания режима динамического торможения [3]. Суточный расход электроэнергии при работе подъёмного двигателя в режиме динамического торможения Wсут К сх I R T , 1ср 1 сут где К сх – коэффициент схемы соединения обмоток статора АМ (при соединении обмоток статора в звезду Ксх 1,23 ); I – средний ток АМ в период торможения; 1ср R – общее активное сопротивление обмоток статора (при 1 соединении обмоток статора в звезду общее сопротивление будет равно R 2 R ); 1 1ф Tсут – время работы АМ в режиме ДТ за сутки. Годовой расход электроэнергии при работе тормозном режиме , W Wсут T год год где T - время работы подъёмного двигателя в режиме ДТ за год. год Результаты расчёта годового расхода электроэнергии показали экономию электроэнергии от 40000 до 85000 кВт-ч в год в зависимости от типа двигателя, его мощности и частоты вращения. Кроме того, режим одновременного действия электрического и механического тормозов позволяет значительно снизить износ тормозных колодок предохранительного тормоза за счёт чего повышается межремонтный их срок, снижаются простои подъёма и повышается производительность шахты. Литература 1. Демьяненко Г.С., Бевз Е.Е. Неразрушающий контроль элементов тормозных и подвесных устройств. – Сб. науч. трудов МакНИИ – Безопасность эксплуатации электромеханического электрооборудования на шахтах. – Макеевка-Донбасс, 1987. – с.69-74. 2. Малиновский А.К. Динамическое торможение асинхронного двигателя с фазным ротором при отсутствии источника постоянного тока //Научно-практический семинар с международным участие «Проблемы и перспективы развития горной механики. – М.: МГГУ, 1995. – с. 17-20. 3. Янцен В.И. Динамическое торможение подъёмных машин с питанием статора от собственного ротора. – М.: Горный журнал, №6, 1970. – с.62-63. Аннотация В статье изложены результаты исследований электромеханических свойств асинхронной машины, работающей в режиме динамического торможения с самовозбуждением и режим аварийной остановки шахтной подъёмной машины в режиме одновременного действия двух тормозов. Ключевые слова шахтная подъёмная машина, предохранительный динамическое торможение, самовозбуждение, замедление тормоз,