ИСТОРИЯ СОЗДАНИЯ ТЕОРИИ И КЛАССИФИКАЦИИ
реклама

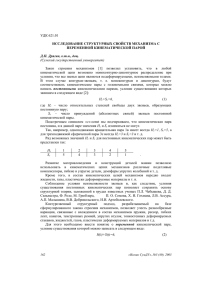
Структура механизмов УДК 621.01 Э.Я. ЖИВАГО ИСТОРИЯ СОЗДАНИЯ ТЕОРИИ И КЛАССИФИКАЦИИ КИНЕМАТИЧЕСКИХ ПАР Введение Теория кинематических пар является важным разделом теории структуры науки о машинах. Без этой теории невозможно исследовать кинематику и динамику механизмов и машин, как нельзя заниматься и синтезом их. В последнее время многие исследователи высказывают мнение о том, что в отношении структуры механизмов и их классификации ничего нового уже создать нельзя. Примером этому является то, что на всех последних конгрессах по теории механизмов, включая и двенадцатый, раздел теории кинематических пар даже не включается в перечень рассматриваемых вопросов. Вышеизложенное служит обоснованием того, что исследования в области теории пар являются неотложными и в высшей степени актуальными. Следует отметить, что от развития теории структуры существенно зависит дальнейший прогресс теории механизмов в целом. Весь период развития теории кинематических пар нам представляется в виде четырех этапов, сущность каждого из которых может быть определена новыми идеями, изменявшими направление развития теории либо представлявшими ее в новом свете. Необходимо, прежде всего, подчеркнуть, что все этапы становления и развития теории кинематических пар связаны с именами французских (Monge, Hachette, Laboulaye), немецких (Reuleaux, Grashof) и английских (Willis, Silwester) ученых. Наиболее существенные, на наш взгляд, идеи, давшие новый виток развития теории, были высказаны в трудах российских ученых П.Л. Чебышева, Х.И. Гохмана, П.О. Сомова, А.П. Малышева, В.В. Добровольского, И.И. Артоболевского, Л.Т. Дворникова. Развитие теории механизмов и машин как самостоятельной науки и формулирование основ теории кинематических пар В данном разделе рассматривается первый этап возникновения теории механизмов и машин и ее становления как отдельной науки. Возникновение теории механизмов стало возможным лишь после того, как творчеством многих поколений изобретателей было создано достаточно большое количество механизмов, представляющих предмет научных исследований. Первые машины и орудия в большинстве случаев служили для передачи и изменения направления и величины сил, а движение в них имело второстепенное значение. В связи с этим, в древности считали, что любая машина состоит из простых машин – рычагов, наклонных плоскостей, нитей. Наблюдение за брошенным камнем или палкой привело к изобретениям стрелы и метательных орудий, причем тогда и появились понятия устойчивости и силы удара. Когда человек стал овладевать вращательным движением, появились, по-видимому, из круглого бревна – колесо, блок и ворот. В V-III вв. до н.э. появилась первая машина – водяная мельница. Изобретенные ловушки для зверей или хитроумные приспособления против искателей кладов представляли собой сложные кинематические цепи, срабатывавшие при нажиме на одно из звеньев. Интерес представляет первое описание машины из сочинения “Об архитектуре” Марка Витрувия [1], архитектора, жившего в первом веке до нашей эры: “Машина есть прочное соединение деревянных частей, предназначенное для передвижения тяжелых грузов и приводимое в движение искусственным образом по кругу, что греки называют круговым движением”. Развитие теории механизмов и машин неразрывно связано с развитием машинного способа производства. Теория механизмов возникла в конце XVIII столетия, когда 26 http://tmm.spbstu.ru История создания теории и классификации кинематических пар развивающаяся промышленность и машиностроение, особенно в таких странах как Англия, Франция и Германия, потребовали от теории решения ряда новых задач. Так, например, значительные потери на трение в громоздком передаточном механизме явились одной из причин, побудивших более точно исследовать законы трения (теорема Карно и уравнение движения машинного агрегата в форме кинетической энергии, исследования законов трения Амонтоном и Кулоном). Потребность в уменьшении неравномерности движения, вызванной применением тяг и коромысел, привела к созданию теории и практическому использованию маховика. Увеличение скоростей вызвало необходимость создания теории зубчатых зацеплений – петербургский академик Леонард Эйлер впервые дал теорию зацеплений и метод построения эвольвентных профилей зубьев, имеющих сейчас наибольшее применение в машиностроении [2]. В XVIII столетии в Западной Европе и в России были организованы первые училища военных, горных и строительных инженеров, в которых машины рассматривались в курсе механики. Естественно, что на первых порах содержанием молодой науки о механизмах и машинах было описание существующих механизмов и создание методов их исследования на базе достижений теоретической механики и математики. Впервые понятие о механизме появилось в 1724 г. у Леупольда [3], а спустя 60 лет Г. Монж [4] уже понимал механизм как систему тел, предназначенных для преобразования движения. Его последователи, заботясь об универсальности создаваемой теории, ввели в классификационную систему существовавшие в то время и возможные механизмы, в том числе и такие, действие которых осуществлялось при помощи деформируемых тел. С этого момента перед теорией механизмов был поставлен вопрос о значении твердых и деформируемых тел в механизмах. Однако вопрос оказался настолько трудным, что удовлетворительного разрешения он так и не получил. Наука “Теория механизмов и машин” возникла на рубеже XIX века, в период широкого интереса к техническим вопросам и великих открытий в области техники: изобретение паровой машины Т. Ньюкоменом в 1763 г., Уаттом в 1769 и позднее Стефенсоном. В Париже в 1794 г. открывается первая в мире политехническая школа, где читается курс по теории механизмов. Этот курс был подготовлен исследователями французской школы (Monge, Hachette, Lanz и Betancourt). Итак, создание теории машин связано с именами Гаспара Монжа и его ученика Лазара Карно. Г. Монж явился инициатором преподавания курса “Построение машин” и наметил основания классификации механизмов. Л. Карно в 1783 г. опубликовал книгу “Опыт о машинах вообще”, которая через 10 лет была переиздана под названием “Основные принципы равновесия и движения”. В этой работе Карно считал, что механика по своей сущности является наукой экспериментальной, тем самым подтвердил ее право на самостоятельное существование. “Элементарный курс машин”, изданный в 1811 г. в Политехнической школе сотрудником Монжа Ж. Ашеттом, содержал принципы построения машин, некоторые сведения по теории зубчатых зацеплений и кулачковых механизмов и описание машин, применяемых на строительных работах. включал классификацию составных частей машин, которые Монж назвал “элементарными машинами”. Тремя годами раньше в Политехнической школе был издан учебник “Курс построения машин”, написанный двумя испанцами: инженером А. Бетанкуром и математиком Х. Ланцем. Курс уже не содержал теорию “простых” машин, а механизмы – “элементарные машины” – были систематизированы по их функциям преобразования движений. По идее Монжа Ланцем и Бетанкуром были построены таблицы, в клетках которых размещались “элементарные машины” (около 40), известные в то время. В первой половине XIX столетия механика машин в основном развивалась во Франции. В 1820 г. в Париже появился курс механики машин Борньи в восьми томах, а в 1822 г. – работа Кристиана, в которой термин “механизм” уже употребляется в современном смысле. Теория Механизмов и Машин. 2008. № 2. Том 6. 27 Структура механизмов В 1849 г. Ch. Laboulaye опубликовал курс теории механизмов, в котором впервые приводится понятие о кинематической паре. В этом курсе французский ученый Лабулэ [5] указал, что “вопрос преобразования движений приводит к образованию кинематических пар, приспособленных для воздействия одного органа на другой”. Пока во Франции создавались основы механики машин, в Англии конструировали металлорежущие станки, гидравлический пресс, паровой молот, винтонарезные, зуборезные станки и много других машин и механизмов. Английское машиностроение в первой половине XIX века было развито значительно выше машиностроения стран континентальной Европы. В Англии же зародилась и техническая периодика: в 1797 г. вышел первый номер “Журнала Никольсона”, посвященного вопросам практических знаний, а в 1798 г. – “Философский журнал”, также посвященный техническим наукам. Первые технические кафедры в Лондонском университете образовались лишь в 1841 г. В том же году вышел из печати труд R.Willis “Principles of Mechanisms”, в котором автор ввел понятие механизма как элементарной составляющей машины. В основу своей классификации Виллис кладет отношение скоростей или отношение направлений ведущего и ведомого звеньев механизма, а также его элементарную форму. В его классификации выделяются четыре группы механизмов, характеризующихся типом соприкосновений звеньев. К первой группе относится соприкосновение качением, ко второй – соприкосновение скольжением, к третьей – механизмы с гибкими передачами и к четвертой – шарнирные механизмы. Классификация Виллиса была значительным шагом вперед. Это видно уже из того, что ею пользовались, с небольшими исправлениями и дополнениями, вплоть до 30-х годов XX века. Вслед за этим трудом во всех странах появляется множество специальных исследований и учебников по кинематике механизмов: в Италии – C.Giullio “Element di cinematica applicata”, 1847, во Франции – Ch. Laboulaye “Trate de cinematique”, 1849, в России – Чебышев П.Л. мемуары “Теория механизмов, известных под названием параллелограммов” (изданный в 1853 г. на французском языке) и др. На Втором съезде русских естествоиспытателей в 1869 г. академиком П.Л. Чебышевым был прочитан доклад “О параллелограммах”. Великий русский математик и механик П.Л. Чебышев является основателем русской школы теории механизмов и машин. Им была выведена первая формула, связывающая количество звеньев, входящих в механизм, и количество кинематических пар, образуемых этими звеньями, с теми движениями, которые данный механизм может воспроизводить. Работы П.Л. Чебышева оказали огромное влияние на дальнейшие исследования в области теории структуры и синтеза механизмов. Более того, поставленная ученым проблема определения подвижности механизма намного опередила свое время. В 1875 г. в Брауншвейге появилось сочинение F. Reuleaux “Theoretische Kinematik”, которое можно считать очень важным этапом в становлении науки. Автор впервые исследовал элементы, из которых складываются механизмы. Выделив структурный элемент машины – кинематическую пару и определив механизм как замкнутую кинематическую цепь принужденного движения, одно из звеньев которой закреплено неподвижно, Reuleaux одновременно дал возможность решать задачи о механизмах методами кинематической геометрии. Ф. Рело впервые дал определение кинематической пары как подвижного соединения двух соприкасающихся звеньев, и это определение не потеряло своего значения до сих пор. В методах исследования механизмов влияние идей Рело на последователей настолько велико, что и до настоящего времени, несмотря на огромное развитие техники, в учебниках по теории механизмов повторяется то, что было высказано в 1875 г. Громадное значение, которое имела книга Рело, вполне заслужено, однако, по справедливости, оно не может быть отнесено к учению о структуре механизмов. Рело отметил самые простые типы кинематических пар. Попытки же его скомбинировать механизмы из этих пар окончились неудачей. В 1900 г. во втором томе “Теоретической кинематики” он отметил три вида твердых звеньев, которые дают шесть классов пар, из 28 http://tmm.spbstu.ru История создания теории и классификации кинематических пар которых составляются все машины. О существе каждого звена и каждой пары в этой книге не говорится. Ф. Рело не пользовался понятием связей. Разницу между системой небесных тел и механизмов он изложил так: в первом случае действуют только “чувствительные” силы, любому изменению которых соответствует изменение движения, а во втором – зависящие от “чувствительных” сил “латентные” силы, действие которых не позволяет ни одной точке двигаться независимо от других точек. Существенный вклад в науку о машинах внес основатель Союза немецких инженеров (VDI) F. Grashof [6]. Он развил теорию кинематических пар, уточнив некоторые положения Ф. Рело, и исследовал структуру машин. Грасгоф разработал учение о высших парах, исходя из понятий центроид и аксоид, и провел исследования пространственных кинематических цепей. Ф. Грасгоф при определении кинематических пар воспользовался понятием степеней свободы. Он делил их на пары трехкратной, двукратной и однократной подвижности в зависимости от того, каким образом происходило касание: по поверхности, плоскости или по линии. Значительные исследования в области теории кинематических пар и структуры механизмов принадлежат французскому механику Г. Кенигсу. Он рассматривал пары как некоторые связи, наложенные на движение механизма, а теорию механизмов – как исследование связей в машинах. Учение о шарнирных механизмах он считал переходным от теоретической кинематики к общей теории механизмов [7]. В 1887 г. вышла в свет работа П.О. Сомова “О степенях свободы кинематической цепи”. П.О. Сомов начал с уточнения определения механизма у Ф. Рело. “Мы будем называть механизмом такую кинематическую цепь, – писал он, – в которой каждая точка описывает определенную траекторию, если один из членов цепи будет закреплен неподвижно, т.е. такую цепь, в которой ни один из членов не имеет более одной степени свободы”. Он дал некоторые определения терминов теории механизмов. Так, кинематическим элементом Сомов назвал “совокупность всех точек какого-либо члена цепи, которые во время движения цепи приходят в соприкасание с точками другого члена цепи, смежного с ним”, кинематической парой – “два соответствующих друг другу кинематических элемента”. Позже, в 1904 г. П.О. Сомов в работе [8] дал и второе определение: “Способ соединения двух смежных членов цепи между собой характеризуется теми связями, которые ограничивают движение одного из этих членов относительно другого. Совокупность этих связей для каждой пары членов называется кинематической парой”. Сомов П.О. первым обратил внимание на поверхности, он показал, что все тела (звенья механизма) соприкасаются по поверхностям, кривизну точек которых определял по формуле Гаусса. Основоположник научной теории кинематических пар Х.И. Гохман – крупный российский ученый, считая себя последователем Ф. Рело, издал в 1890 г. труд “Кинематика машин”, посвященный Ф. Рело, в котором дал всестороннее освещение кинематических пар. Его основные идеи составили фундамент современной теории кинематических пар. Кинематическая пара, по определению Гохмана, “есть искусственное средство стеснять движение одного тела по отношению к другому, считающемуся неподвижным, причем движение по некоторому направлению или совершенно уничтожается, или делается функцией от движения, принимаемого телом по другому направлению”. Х.И. Гохман впервые предложил классификацию кинематических пар по числу наложенных связей. Он различал в относительном движении тел шесть элементов: три вращения около координатных осей и три поступательных движения вдоль этих осей. Гохман предложил разделение пар по видам относительных движений, считая три поступательных и три вращательных движения независимыми или зависимыми. Как и Сомов, Гохман говорил о поверхностях, по которым происходит образование кинематических пар, но классифицировал пары не по виду контактирующих поверхностей Теория Механизмов и Машин. 2008. № 2. Том 6. 29 Структура механизмов звеньев, а “по способу зацепления тел между собою” на пары точечные, линейчатые и поверхностные, выделяя еще как особый вид пару траекторную. Кроме того, Гохман Х.И. разделил пары на полные и не полные, простые и составные, считая, что “одна пара низшего порядка может быть составлена из нескольких пар высших порядков”. Им впервые был затронут вопрос о числе контактов, однако сам Гохман представил на рассмотрение всего лишь две неодноконтактные пары. Исследования Гохмана Х.И. не дают решения весьма важного практического вопроса: в какой мере каждая пара ограничивает движения механизма? Кроме того, ограничив шестью элементами относительные движения двух твердых тел – тремя вращательными и тремя поступательными движениями, Гохман не рассмотрел возможности одновременности вращательных и поступательных движений. Весь этот период времени можно считать периодом поисков в области теории механизмов. При этом авторы исследовали существующие механизмы с точки зрения кинематического анализа. В конце периода были разработаны первые критерии классификации кинематических пар. Анализ подходов профессора А.П. Малышева к классификации кинематических пар В 1923 г. профессором кафедры деталей машин Томского технологического института А.П. Малышевым были опубликованы работы по прикладной механике, в которых он излагает вопросы классификации кинематических пар [9]. Он писал, что “кинематическая пара с точки зрения конструкции есть приспособление, с помощью которого два звена сцепляются друг с другом. А с точки зрения аналитической, она представляет собой совокупность условий связи, которыми определяется относительное движение двух звеньев, образующих эту пару”. “Какими бы условиями связи не ограничивали относительное движение двух тел, - считал А.П. Малышев, – оно может быть сведено, в конце концов, к геометрическим представлениям, и поэтому исследования кинематических пар целесообразней всего вести с геометрической точки зрения.” Малышев А.П. разделил кинематические пары по числу вносимых условий связи на классы, причем номер класса совпадает с числом условий связей в паре. Так, кинематическая пара, при образовании которой вносятся пять ограничений, отнесена к пятому классу, при одном ограничении – к первому. Всего Малышев получил 44 пары различных классов. В его таблице оказалось две пары первого класса, четыре – второго, семь – третьего, двенадцать – четвертого и девятнадцать – пятого класса. Каждой кинематической паре А.П. Малышев присваивал обозначение из четырех прописных букв русского алфавита. Но классификация Малышева оказалась непонятой и в последующих работах других авторов не использовалась. Этот этап развития теории кинематических пар характеризуется разработкой первой научной классификации их по числу условий связи. Разделение Малышевым пар на классы сохранилось до настоящего времени. Структура механизмов в исследованиях В.В. Добровольского и И.И. Артоболевского Профессор Добровольский В.В., излагая свою классификацию кинематических пар, предложил ввести термин “элемент звена”, эквивалентный термину “рабочая поверхность” звена, так как он считал, что “возможные относительные движения звеньев зависят лишь от формы тех поверхностей на каждом звене, которые приходят в соприкосновение между собой. Пара таких элементов, находящихся в соприкосновении, и будет кинематической парой, т.е. способом сочетания звеньев, содержащих эти элементы” [10]. Однако в дальнейшем он не развил эту мысль и предложил классификацию пар по “тем относительным движениям, которые остаются возможными для звеньев, соединенных парой”. 30 http://tmm.spbstu.ru История создания теории и классификации кинематических пар В.В. Добровольский все кинематические пары, соединяющие звенья, распределил “по пяти группам в зависимости от числа независимых параметров, определяющих относительное положение звеньев” – т.е. по числу степеней свободы, назвав их родами. Пары первого рода допускали лишь одну степень свободы в относительном движении звеньев, пары второго рода – две и т.д. до пятого рода, допускающих пять степеней свободы в относительном движении. Назвав эти параметры “параметрами движения” (для поступательного движения) и “параметрами вращения” (для вращательного движения звеньев), он предположил существование двух пар первого рода, четырех – второго, шести – третьего, четырех – четвертого и двух пар пятого рода – всего восемнадцать пар, имеющих независимые движения. Остальные пары, имеющие зависимые относительные движения внутри каждого рода В.В. Добровольский разбил на группы; так в парах первого рода пять групп пар: 1 – два параметра связаны одним уравнением; 2 – три параметра связаны двумя уравнениями; и так до пятой группы, когда шесть параметров связаны пятью уравнениями. Каждую группу он разделил еще на подгруппы в зависимости от типа связанных между собой параметров (В или П). Согласно принятым параметрам, профессор Добровольский В.В. приводит схемы некоторых из них, указывая, что остальные “не поддаются пока реализации” и в “универсальной таблице пар – универсальной таблице механизмов” приводит “исчерпывающую” классификацию 60 возможных комбинаций, из которых 18 пар с независимыми движениями и 42 – с зависимыми. В 1953 г. Артоболевский И.И. издал учебник по теории механизмов, состоящий из трех частей, первая из которых рассматривает вопросы структуры и кинематики механизмов [11], а также теорию кинематических пар. Приняв за основу классификацию пар по числу условий связей, академик Артоболевский И.И. разделил пары внутри каждого класса на виды в зависимости от количества и рода относительных движений. Так, рассмотрев пары I класса, пяти степеням свободы которых соответствуют пять простейших движений, Артоболевский предложил разделить пары на два вида - в зависимости от числа исключенных (поступательного либо вращательного) движений. Для пар I класса может существовать только один вид - такой, где отсутствует поступательное движение. Пару I класса второго вида, в которой имелось бы три поступательных и два вращательных движения, создать не удается, так как, если будет иметь место “соприкасание каких-либо двух геометрических элементов, то всегда относительное поступательное движение в направлении нормали к этим геометрическим элементам является уже невозможным”. Пары II класса имеют только два вида: первый (исключены два поступательных движения) и второй (исключены одно поступательное и одно вращательное движения). Пару третьего вида создать невозможно, так как в ней необходимо будет исключить два вращательных движения, т.е. осуществить три поступательных движения. Кинематические пары III класса налагают на относительное движение каждого из входящих в нее звеньев три ограничения, поэтому он делил их на три вида: 1 – исключены три поступательных движения, 2 – исключены два поступательных и одно вращательное движения и 3 – отсутствуют одно поступательное и два вращательных движения. Пара четвертого вида не может быть создана, так как она должна осуществить одновременно три поступательных движения. Пары IV класса по Артоболевскому налагают на относительное движение звеньев четыре ограничения. Исключаются три поступательных и одно вращательное движения (1го вида), два поступательных и два вращательных (2-го вида), одно поступательное и три вращательных (3-его вида). По определению И.И. Артоболевского пары IV класса третьего вида осуществлены быть не могут. Пары V класса могут быть двух видов: иметь либо вращательное, либо поступательное движения, либо и то и другое – зависимые (винтовая пара). Разделение пар по видам относительных движений не было доведено Артоболевским И.И. до логического завершения. Зная о классификации В.В. Добровольского, согласно Теория Механизмов и Машин. 2008. № 2. Том 6. 31 Структура механизмов которой при равном количестве одинаковых относительных движений пары могут различаться по движению относительно разных осей координат, И.И. Артоболевский не привел в своих доказательствах это различие. И.И. Артоболевский считал возможным конструктивно получить всего 14 простых пар, 10 винтовых и неограниченное количество сложных. При этом, как он указывал, только часть из этих пар может быть реализована. К концу шестидесятых годов ХХ века считалось, что теория кинематических пар полностью разработана, и что не может быть крупных открытий в этой области. Однако некоторые ученые продолжали попытки создать теорию кинематических пар. Так, известны работы С.С. Арутюнова, А.И. Тайнова и Л.Н. Решетова. В статье Арутюнова С.С. “О структуре и классификации кинематических пар”, изданной в 1959 г., “структурными элементами звеньев или пар” названы поверхности соприкосновения звеньев. Рассмотрев комбинации двух “простых” движений и получив три варианта движений: два поступательных; одно поступательное и одно вращательное и два вращательных движения, автор получил поверхности, которые он назвал простыми структурными элементами с независимыми кинематическими параметрами: плоскость, цилиндр, сферу и тор. Арутюнов С.С. соглашается с разделением пар по числу независимых движений, принятым Добровольским, равным 18, и даже создает пары, которые, по его мнению, позволяют осуществить три поступательных движения. В таблице, которая носит название “классификация кинематических пар по кинематическим признакам”, он приводит пары, имеющие по три поступательных движения. Такой парой С.С. Арутюнов считает сферу на сфере. Из комбинаций двух простых кинематических пар, при особом взаимном расположении их структурных элементов на звеньях, автор получил различные “составные” пары, т.е. такие пары, в которых соприкасание звеньев происходит не в одной точке, не на одной линии, не по одной поверхности, а по крайней мере в двух точках, по двум линиям или по двум поверхностям. Всего Арутюнов получил 12 пар (6 простых и 6 составных), которые он смог реализовать и назвал “основными кинематическими парами с независимыми кинематическими параметрами”, причем, автор заявлял, что две из них в классификации Артоболевского отсутствуют, а одна - “в литературе неизвестна”. Идея С.С. Арутюнова назвать структурными элементами поверхности соприкосновения звеньев была верной, но, во-первых, он сам не определил, то ли это элементы звеньев, то ли пар, а, во-вторых, все его четыре поверхности были выбраны без математического обоснования, поэтому он не смог создать строгую классификацию кинематических пар. Профессор А.И. Тайнов в работе “Основы теории структуры механизмов” разделил пары по кинематическому признаку на простые (независимые) и производные (зависимые). Простыми парами он назвал такие, где все простейшие возможные движения элементов являются независимыми друг от друга, а производными – такие пары, где отдельные простейшие возможные движения элементов являются взаимно зависимыми. При этом он предложил определять класс пары по параметру i (вид пространства), мотивируя тем, что одна и та же пара (например, поступательная) в пространственном механизме будет накладывать большее число связей, чем в плоском и будет считаться парой пятого (в первом случае) или третьего класса (во втором). Здесь Тайнов А.И. складывал число условий связи в одной паре с числом общих связей, наложенных на кинематическую цепь в целом. Важные мысли высказывает в работе [12] Решетов Л.Н. об образовании кинематических пар низших классов из пар высших классов, а именно, об образовании кинематических пар всех классов из пар первого класса. Он пишет: “Чтобы получить пару второго класса, необходимо соединить две пары первого класса. Вообще для получения пары любого класса пары следует соединять параллельно. При этом сумма классов соединяемых пар равна классу получаемой пары, а при наличии избыточных связей эта сумма равна классу получаемой пары плюс число избыточных связей”. 32 http://tmm.spbstu.ru История создания теории и классификации кинематических пар Описанный выше этап развития теории пар характеризуется тем, что в этот период продолжались работы по созданию классификаций кинематических пар, определению числа критериев классификации, а именно: вида и характера относительного движения звеньев. Теория и классификация кинематических пар профессора Л.Т. Дворникова В 1994 г. было опубликовано учебное пособие Л.Т. Дворникова [13] “Начала теории структуры механизмов”, в котором автор обосновывает введение новых понятий в структурную теорию механизмов и, прежде всего, в теорию кинематических пар. Автор предложил ввести понятие “геометрического элемента звена”, так как понятие “элемент кинематической пары” не позволяет видеть пути дифференциации пар при одних и тех же элементах кинематических пар. Связи звеньев могут происходить в точках, по линиям или по поверхностям в зависимости от геометрических форм соприкасающихся частей звеньев, а эти части звеньев являются поверхностями. Он предложил “части звеньев, которые входят в контакт с другими звеньями”, назвать “геометрическими элементами звеньев”. Геометрические элементы звеньев он представляет в виде гладких, т.е. непрерывно дифференцируемых в рассматриваемой области поверхностей. В геометрических элементах звеньев – поверхностях автор нашел различия исходя из значений гауссовой кривизны К = k1·k2, где k1 – максимальная и k2 – минимальная кривизна точки поверхности. В зависимости от значений гауссовой кривизны могут быть точки поверхности (и поверхности) эллиптические (К > 0), гиперболические (К < 0) и параболические (К = 0). Исходя из этого, он обосновал существенные различия семи “простых” поверхностей, которые назвал “шаром” (k1 > 0, k2 > 0), “лункой” (k1 < 0, k2 < 0), “корсетом” (k1 > 0, k2 < 0), “седлом” (k1 < 0, k2 > 0), “цилиндром” (k1 > 0, k2 = 0), “желобом” (k1 < 0, k2 = 0) и “параллелепипедом” (k1 = 0, k2 = 0) (рис. 1). Все указанные поверхности названы “простыми” – т.е. поверхностями, гауссова кривизна которых не меняется по знаку. Шар Цилиндр Корсет Лунка Желоб Седло Параллелепипед Рис. 1. Геометрические элементы звеньев В той же работе, рассмотрев требуемые практикой виды относительных движений, автор доказал, что всего можно осуществить пятнадцать вариантов кинематических пар, допускающих различные комплексы относительных движений. Разбив все односвязные пары на классы и приведя их условное изображение, автор создал алгоритм образования неодносвязных пар, используя в различном сочетании одноконтактные кинематические пары. Именно после обоснования семи простых поверхностей в качестве геометрических элементов звеньев состоялась научная теория кинематических пар и появилась возможность разработать критерии их систематизации и составить при участии автора настоящей статьи полную классификационную таблицу кинематических пар. В 1999 г. на ХХ Всемирном конгрессе IFToMM в Финляндии состоялось представление работы [14], в которой изложена научная теория кинематических пар и их Теория Механизмов и Машин. 2008. № 2. Том 6. 33 Структура механизмов классификация. В работе доказано существование 14 одноконтактных пар и 110 многоконтактных. СПИСОК ЛИТЕРАТУРЫ 1. Боголюбов А.Н. Теория механизмов и машин в историческом развитии ее идей. – М.: Наука, 1976. – 466 с. 2. Артоболевский И.И., Боголюбов А.Н. Теория механизмов и машин. - В кн.: История механики с конца XVIII века до середины XX века. – М.: Наука, 1972 С. 190-225. 3. Leupold J. Theatrum machinarum. – Leipzig, 1724, Bd. 1 4. Monge G. Traté élémentaire de statique a l’usage des colleges de la marine. – Paris, 1786. 5. Laboulaye Ch. Traté de cinématique ou théorie des mécanismes. – Paris, 1849. 6. Grashof F. Theorie der Getriebe. (Theoretische Maschinenlehre. B. II), 1883. – p. 348. 7. Koenigs G. Etudes critique sur la théorie générale des mécanismes. – Comptes Rendus de l’Academie des sciences 1901. – Paris, t. 133, p. 485. 8. Сомов П.О. Основания теоретической механики. – СПб.: изд-во К.Л. Риккера, 1904.753 с. 9. Малышев А.П. Прикладная механика. Вып 1. Структура и синтез механизмов. – Томск, 1923. - 91 с. 10. Добровольский В.В. Система механизмов. – М.: Машгиз, 1943.- 96 с. 11. Артоболевский И.И. Теория механизмов: Учеб. для втузов. – М.: Наука, 1965.-776 с. 12. Решетов Л.Н. Конструирование рациональных механизмов. – М: Машиностроение, 1272. – 256 с. 13. Дворников Л.Т. Начала теории структуры. – Новокузнецк: изд-во СибГГМА, 1994. – 102 с. 14. Дворников Л.Т., Живаго Э.Я. Основы теории кинематических пар. – Новокузнецк: изд-во СибГИУ, 1999. – 102 с. Поступила в редакцию 22.04.2008 После доработки 27.10.2008 34 http://tmm.spbstu.ru