ДИНАМИЧЕСКАЯ ОСТОЙЧИВОСТЬ СКОРОСТНЫХ СУДОВ
реклама

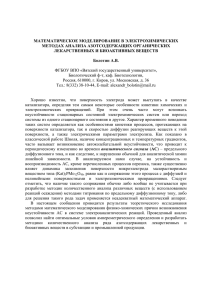
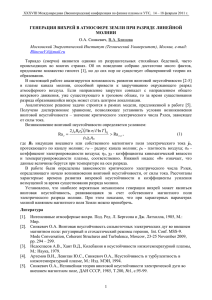
ДИНАМИЧЕСКАЯ ОСТОЙЧИВОСТЬ СКОРОСТНЫХ СУДОВ Лу Кодега (Professional Boatbuilder N31'94) Прим.ред.: 30 лет назад, уже в конце жизни, Раймонд Хант сказал: "По-моему, строительство глиссирующих судов – это по-прежнему дерзание... они до сих пор несовершенны". Хант сделал это заявление через несколько лет после создания "Moppie" - его наиболее удачного 9-метрового корпуса "глубокое V", буквально перевернувшего проектирование мощных катеров для открытого моря. Можно доказать, что сегодня теория проектирования скоростных глиссирующих судов все еще не отработана, потому что нам еще многое предстоит изучить. Лишь горстке профессионалов, например, действительно доступны сложные вопросы гидродинамики ходовой остойчивости малых глиссирующих судов. Среди них – конструктор Лу Кодега, представленная статья которого обобщает его последние технические монографии по вопросам динамической остойчивости скоростных судов. Кодега также делал доклад по этому вопросу на IBEX'94 совместно с инженером «Mercury Marine» Диком Снайдером, в настоящее время президентом Американского совета по катерам и яхтам (ABYC). --------Я был новичком в колледже, когда при управлении одной из учебных 16-футовых мотолодок типа "глубокое V", она вдруг без видимой причины резко накренилась на левый борт и осталась пребывать в этом состоянии. Лодка, оснащенная 70-сильным ПМ, кажется, чувствовала себя в этом положении превосходно и не проявляла склонности выпрямиться. Старший студент-наставник далее на продолжении всего выхода говорил, что об этом не стоит беспокоиться, это случается постоянно, и единственное, что я смог бы сделать для спрямления лодки – это сбавить ход. Тот инцидент стал судьбоносным. Через несколько лет я начал профессионально изучать физику проблемы скоростной неустойчивости с обширными исследованиями самоспрямляющегося катера Береговой Охраны, имевшего сильную к тому склонность. Этот девятиметровик имел ширину 2.5 м по скуле, килеватость на транце 20°, и был оборудован одним стационарным дизелем. Во время хода по морю со своей наибольшей скоростью около 30 уз. он за несколько секунд мог вдруг потерять ходовой дифферент, накрениться на 30° влево, и затем привестись на правый борт перпендикулярно курсу. Неустойчивость сильно зависела от скорости и не возникала при менее чем 27 уз.. Катер имел достаточную статическую остойчивость и громадный диапазон углов крена, почти до 180°, в котором спрямляющий момент оставался положительным. Потеря устойчивости наступала внезапно и, кажется, без всякой причины, с лишь едва различимой приметой: возникновением ощущения «пустоты» управления штурвалом. После анализа гидродинамических характеристик в различных условиях мы пришли к заключению, что спасательный катер был устойчивым при двух углах ходового дифферента. Первый находился там, где и ожидалось – 6°, а второй - при 1° дифферента на нос. При меньшем угле катер был устойчив по дифференту, но неустойчив по крену. Когда катер кренился на левый борт под действием винта, он терял также и управляемость, и устойчивость на курсе, быстро входя в брочинг. В то время о возможности наличия двух углов ходового дифферента ничего не было известно. Однако после многих исследований, подтверждавших наличие двух устойчивых углов дифферента, часть информации дошла до меня от боцмана. Он сказал мне, что в течение 20 минут он управлял катером при отрицательном дифференте. Когда я спросил, как он справлялся с поддержанием прямого положения катера, боцман бесхитростно сообщил, что каждый раз, когда катер слегка накренялся, он возвращал его обратно движением руля. Я убедился, что почти каждый конструктор или строитель (и многие водители) скоростных судов может рассказать подобные истории. Хотя большинство глиссирующих судов не страдает присущей динамической неустойчивостью на протяжении всей кривой сопротивления, я убежден, что проблема намного более распространена, чем мы себе представляем. Я надеюсь в этой статье определить проблему неустойчивости в приложении к остроскулым глиссирующим судам, обсудить некоторые причины, предложить способы избежания динамической неустойчивости, и порекомендовать мероприятия в случае, когда она имеет место. В большей степени я надеюсь, впрочем, что эти рассуждения вызовут открытый, доказательный диалог между конструкторами и строителями, которые ищут решения проблемы устойчивости малых глиссирующих судов. УСТОЙЧИВОСТЬ ГЛИССИРОВАНИЯ: ОСНОВЫ Формальные расчеты остойчивости, часто требуемые Береговой Охраной и другими контролирующими организациями, обычно проводятся и для малых скоростных судов. Конструктор рассчитывает спрямляющий момент в диапазоне водоизмещений и углов крена и сравнивает его с кренящим моментом от ветра, смещенной нагрузки, несимметричного затопления и т.п. Полезные при сравнительном анализе, эти расчеты неприменимы впрямую к судну, движущемуся в режиме глиссирования. Остойчивость глиссирующего судна - функция как формы корпуса выше и ниже статической ватерлинии, так и динамических явлений, вызванных течением воды вдоль корпуса, и меняющихся с изменением скорости. Далее, остойчивость зависит не только от положения ЦТ, но и от распределения весовой нагрузки. Реакция водителя также усложняет результаты. Фактически, определение устойчивости глиссера проходит намного сложнее, чем даже у самолета. Подводная геометрия корпуса, а, следовательно, и гидродинамические силы и моменты постоянно меняются со скоростью, воздействием волн, руля, положением угловой колонки и триммеров, условиями нагружения. ПРЕДЕЛЫ СВОБОДЫ Судно имеет шесть степеней свободы. Другими словами, любое движение произвольной сложности может быть представлено комбинацией шести независимых перемещений. Повороты вокруг трех осей дают дифферент, крен и рысканье. Нет судов, безразличных или совершенно устойчивых по отношению этим степеням свободы. Дельфинирование – колебания по дифференту, вызываемые внешними возмущениями или присущими свойствами судна, попадает в эту категорию и вообще говоря нежелательно для глиссеров. Судно может дельфинировать устойчиво, когда колебания остаются в основном теми же при неизменных скорости, дифференте и т.д. Дельфинирование может быть также и неустойчивым, с постоянным ростом размаха колебаний, даже если ни одно из внешних условий не меняется. Если дельфинирование вызвано внешним возмущением, таким как пересечение волны, оно может мало-помалу исчезнуть. Сходные колебания - переваливание с борта на борт - иногда возникают при очень высокой скорости. Хотя переваливание изучено намного меньше, чем дельфинирование, оно имеет во многом сходный характер. Неустойчивость, не сопровождающаяся колебаниями вокруг трех осей, еще более таинственна. Натурные испытания, а также математическое моделирование выявили, что некоторые суда, такие как рассмотренный выше катер береговой охраны, имеют более одного устойчивого угла дифферента при одной и той же скорости. Они идут с нормальным дифферентом до тех пор, пока не перейдут на другой, меньший, под действием внешнего влияния - волны или руля. Суда с более чем одним устойчивым углом крена более распространены. Как и в случае с двумя углами ходового дифферента, они идут в прямом положении, пока внешняя сила не перевалит их на другой устойчивый угол. Это явление напоминает поведение водоизмещающего судна с отрицательным плечом начальной остойчивости. Судно принимает крен на один из бортов до тех пор, пока достаточно развившийся спрямляющий момент не остановит накренения. Внешняя сила, например ветер, действующая против равновесного крена, приведет к быстрому переваливанию на другой борт в равновесный крен противоположного знака. Брочинг, распространенный среди скоростных судов, обычно вызывается действием волн, но в основном сопровождается зарыскиванием. По моему мнению, колебательнаая неустойчивость, подобная дельфинированию или переваливанию, менее опасна, чем неколебательные ее разновидности. Колебательная неустойчивость обычно более предсказуема на ходу; судно, дельфинирующее в данных условиях, будет дельфинировать всегда. Наблюдая постепенное развитие этого вида неустойчивости, водитель имеет возможность приспособиться к судну, чтобы понемногу раздвинуть границы управления, и, во многих случаях, исправить дифферент для ликвидации неустойчивости. К тому же, такая неустойчивость обычно имеет место у наиболее скоростных, тщательно выполненных судов, требующих внимательного, опытного водителя. Другое дело неколебательная неустойчивость. Она возможна у судов среднего уровня исполнения, с менее внимательными и потенциально менее опытными водителями. Вдобавок, такая неустойчивость наступает внезапно и кажется имеющей случайный характер. НЕКОЛЕБАТЕЛЬНАЯ НЕУСТОЙЧИВОСТЬ Типичные диаграммы распределения давлений по глиссирующему корпусу демонстрируют область высоких давлений вблизи критической линии, где днище встречает поток, и, в сторону кормы до транца находится область более низких давлений, превышающих все же статические по величине. Эта стандартная картина разработана для призматических глиссирующих поверхностей, с постоянной шириной и равной килеватостью по всей смоченной длине. Это рациональная аппроксимация кормовой части типичного глиссирующего корпуса с относительно прямыми линиями батоксов. Реальные же корпуса имеют некоторую вариацию ширины и килеватости, заставляющую батоксы более или менее изгибаться, особенно в носу. Наиболее сильно изогнутые носовые батоксы начинают обтекаться при ходе судна по волне, на циркуляции или выходе на глиссирование. У судов тяжелых или удифферентованных на нос эти линии могут находиться в потоке постоянно. Поскольку вода течет в первую очередь вдоль батоксов в корму от критической линии, течение и распределенние давлений наиболее схожи с таковыми у спинки крыла. Это подтверждают натурные испытания. Динамические давления на таких изогнутых поверхностях не только ниже, чем на призматических моделях, но при малом дифференте и значительном крене также обнаруживались и давления, по величине меньшие атмосферного. Эффект действующего распределения давлений велик. Положительное распределение на призматических моделях подразумевает, что давления всегда и везде превосходят статические, и на корпусе, выведенном из положения равновесия, они создают положительный восстанавливающий момент. Возможность отрицательного распределения подразумевает, что местами развиваются давления меньше статических. Возможна не только потеря восстанавливающего момента, но и при изменении ходовой посадки – возникновение опрокидывающего момента (отрицательной устойчивости). Это было доказано испытаниями и математическим моделированием судов, обладавших сильной неустойчивостью. В самом деле, переваливание и дельфинирование могут иметь место даже если динамические давления всегда положительны. Неколебательная неустойчивость все же развивается только при наличии отрицательных (меньших статических) динамических давлений. Явная демонстрация такого распределения имеет место на глиссирующих лодках "джонбот". При смещении пассажира в нос ходовой дифферент будет уменьшаться, и в конце концов носовая изогнутая часть погрузится. Нос будет «подсосан», и лодка может развернуться или опрокинуться. Д.Савицкий, глиссерист, профессор Стивенсовского Технологического института в Хобокене, Нью-Джерси, рассказывал историю прошлых лет, как гоночный катамаран зарылся носом и был сильно поврежден. Когда происшествие расследовали, выяснилось, что носовая обшивка между элементами набора была выломана наружу, при том, что положительное распределение давлений должно было бы продавить ее внутрь. Последствия такого вида неустойчивости на обычных судах разнообразны. Некоторые суда, как я упоминал, имеют два устойчивых угла глиссирования, один с посадкой "носом вверх", другой - "носом вниз". Пониженный дифферент обычно приводит к росту сопротивления и брызгообразованию - и иногда к потере устойчивости по крену. Некоторые суда накреняются на борт под воздействием руля, винта или волн и остаются в этом положении. Некоторые заныривают даже при умеренном волнении. Я однажды разбил "зеленую воду" о лобовое стекло 36футовой лодки (к счастью, не моего проекта), когда она занырнула под трехдюймовую волну на менее чем 35 уз. скорости. Все, что способно внезапно изменить распределение давлений, может привести к динамической неустойчивости. Частые виновники – вентилируемые выступающие части, особенно рули и кронштейны гребных валов. Асимметрия днища, вызванная ошибками разметки, сварочными деформациями или даже преждевременный съем с матриц - потенциальные причины. Раннее снятие возникает, когда стеклопластиковая деталь местами отстает от матрицы еще до окончания выклейки. Если его не обнаружить, последующие слои ламината закрепляют искажение. Так, например, четвертое судно в серии резко кренилось на высокой скорости. Все предыдущие суда управлялись хорошо, но тщательное исследование днища выявило предснятый участок в виде бухтины глубиной 3 мм на площади около 20 дм2. Участок был заполнен и обработан, и проблемы с управляемостью исчезли. Эксперимент показывает, что судно, неустойчивое при некоторых условиях, обычно неустойчиво всегда при повторении этих условий. Практически к неустойчивости может привести очень неполный набор обстоятельств. Это может быть сочетание нагрузки, центровки, положения транцевых плит (откидки мотора), действия волн, угла поворота руля - и неустойчивость возникнет как бы случайно. Некоторые лодки просто принимают глубокий крен и сохраняют его каждый раз при резкой перекладке руля. Другие нуждаются в многочасовых испытаниях для выявления неустойчивости. УСТРАНЕНИЕ ПРОБЛЕМЫ С конструкторской точки зрения только дельфинирование может быть в настоящее время просчитано с некоторой степенью уверенности. Используя графики, построенные по испытаниям, конструктор может просто выбрать килеватость, ширину, массу и положение ЦТ, при которых судно сможет ходить без проблем во всем диапазоне скоростей. Во многих случаях, особенно для быстроходных судов, водитель должен во избежание дельфинирования правильно удифферентовать судно. Есть критерии, которые могут использоваться конструктором для устранения неустойчивостей отличных от дельфинирования типов. Многие известные мне суда с неколебательной неустойчивостью имели два горба на кривой дифферента от скорости . Имея это в виду представляется справедливым сопоставить проект со стандартными сериями моделей, их испытаниями, и устранить причины (удлинение, несущая площадь, нагрузка, положение ЦТ), приводящие к возникновению двух горбов дифферента. Вообще должны быть устранены следующие вещи: высокая нагрузка на днище (и по длине, и по ширине), и носовое положение ЦТ. Далее, график выявляет нагрузки и положения ЦТ для нескольких судов, некоторые из которых имели динамическую неустойчивость. Видна строгая зависимость от нагрузки и носового расположения ЦТ. Форма батоксов здесь также показывает вероятную склонность к нерегулярной неустойчивости с увеличением кривизны. Взглянув на данные по испытаниям крыльев видно, что более изогнутые крылья развивают и большие динамические давления. Поверхности же с локальным отрицательным углом атаки (где вода не растекается к бортам, а тащится за днищем) развивают отрицательные динамические давления. Понятно, что судно с сильно изогнутыми батоксами будет более склонно к неустойчивости, чем с призматическими. Это соотносится с наблюдениями, что сильно нагруженное днище и носовое положение ЦТ – главная причина неустойчивости. Такое сочетание условий нагружает носовую, более изогнутую часть днища. НЮАНСЫ Скорость, конечно, играет первую роль во всех видах динамической неустойчивости, хотя, подобно изгибу батоксов ее влияние трудно оценить количественно. В состоянии покоя распределение давлений на корпусе - статическое. На ходу же действуют и статические, и динамические давления. С возрастанием скорости судно выходит на глиссирование, и статические давления уменьшаются, тогда как динамические растут (и в положительном, и в отрицательном направлении) пропорционально квадрату скорости. Соответственно, любая склонность корпуса развивать отрицательные, дестабилизирующие давления проявляется с ростом скорости. В некоторых случаях существует конечная пороговая скорость, ниже которой движение устойчиво. Относительно простые и распространеные модификации корпуса могут привести к возникновению проблемы устойчивости. Увеличение мощности стационарного двигателя добавляет скорости и веса с малым влиянием на ЦТ и может повысить склонность судна к неустойчивости. Увеличение размера подвесного мотора или установка его на кронштейн смещает ЦТ в корму. Это снижает вероятность нерегулярной неустойчивости, но может привести к дельфинированию или переваливанию. Добавка веса при размещении оборудования приводит к росту нагрузки на днище и почти всегда сдвигает ЦТ в нос, увеличивая склонность к неустойчивости. Более сложно влияние удлинения корпуса d кормe без сдвига моторов, редукторов и баков, в результате которого имеем судно с более сдвинутым в нос ЦТ и, возможно, более нагруженным днищем - более склонное к потере устойчивости с ростом скорости. В нынешней ситуации лучший способ выявления динамической неустойчивости модельные и натурные испытания. Разрабатывая план экспероимента, следует помнить, что тяжелые, скоростные и уцентрованные в нос суда - первые кандидаты на потерю устойчивости. Должны быть учтены дальнейшие модификации и достройки, обновления двигателей и т.п. Модельный эксперимент может быть проведен на ранних стадиях проектирования, однако он не всегда точен, потому что в некоторых случаях особенности обводов, приводящие к неустойчивости, очень малы, и не могут быть надежно реализованы в модели. Любые натурные испытания должны проводиться с соблюдением всех мер безопасности. Испытатель постарается ввести лодку в ситуации, выявляющие ее дурные наклонности. Даже если наступление неустойчивости повторяемо, оно может произойти в первый раз без предупреждения. РЕШЕНИЕ ПРОБЛЕМ Судно, испытывающее проблемы с устойчивостью, можно исправить. В первую очередь необходимо определить, чем вызвана неустойчивость – формой корпуса и положением ЦТ, или же вентиляцией днища. Если есть подозрение на вентиляцию, необходимо исключить доступ воздуха под днище. Часто проход воздуха наблюдается там, где каверны открываются в атмосферу, обычно у транца. Если это имеет место, виновная выступающая часть должна быть найдена и заменена. Если причина - вихрь за невентилируемой частью, проблему решит ее доработка или замена на более обтекаемую. Удаление от поверхности и заглубление сделает вентиляцию менее вероятной. Рули, вообще говоря, выиграют от доработки и заглубления. Если они далеко за транцем, может помочь установка горизонтальных антикавитационных пластин вблизи верхней кромки, как это сделано у подвесных моторов и угловых колонок. При неосуществимости этих мер реальным решением может стать продление кормы. Ходовые качества судна с более чем одним устойчивым углом крена могут быть улучшены увеличением угла атаки корпуса. Это может быть достигнуто сдвигом масс в корму, ограничением поджатия "ноги", увеличением подъемной силы в носу подстройкой брызгоотбойников и скул, или использованием винта с меньшей тягой. Иногда может помочь подъем транца, но не всегда успешно, поскольку такая корма подсасывает поток, не вызывая подъем носа. Часто оказывается намного дороже "вылечить" неустойчивость, вызванную формой корпуса и положением ЦТ. Поможет сдвиг масс в корму, так же как и облегчение судна без перемещения ЦТ в нос. В некоторых случаях помогает расширение скул в носовой части, а также отсечение потока от днища продольными реданами. Иногда помогает скругление батоксов в корме, но ограниченно. Зачастую наиболее надежно, хоть и неприятно, снижение скорости. Действительно, ВСЕ проблемы динамической неустойчивости устранимы снижением скорости. В некоторых случаях скидка пары узлов полностью решает проблему. Хоть это и выходит за рамки данной статьи, ценно напоминание, что колебательная неустойчивость у судов с подвесными моторами может вызываться люфтами в рулевой системе, приводящими к переваливанию или рысканью. Когда система подтянута, настроена или заменена, проблема исчезает. СМЕНА ИДЕАЛОВ В настоящее время проведены основательные исследования по гидродинамике глиссеров и динамике неустойчивости. Однако завершение этого сложного мероприятия не предвидится в ближайшем будущем. Более того, вообще мыслится, что усилия, требуемые на математическое моделирование корпусов и прогоны обширных гидродинамических симуляций будут неэффективными для большинства проектов. Я начал эту статью, выразив уверенность в том, что каждый причастный к глиссерам может рассказать хотя бы одну историю войны с динамической неустойчивостью. Я убежден, что есть только один путь получения быстрого решения проблемы - построить базу данных по судам, имеющим динамическую неустойчивость, и искать зависимость между скоростью, водоизмещением, положением ЦТ и формой батоксов. Я надеюсь, что эта статья хотя бы подтолкнет конструкторов и строителей начать открытое обсуждение проблемы и обмен информацией.