Приложение 4.2.8.1 Полный текст отчета по разделу 4.2.8.1
реклама

Приложение 4.2.8.1
Полный текст отчета по разделу 4.2.8.1
2.8. Разработка алгоритма восстановления фазы из ее
главного значения в условиях неравенства нулю
соленоидальной компоненты ее градиента для
интерферограмм ИРСА с границами разной формы
Аннотация
Реализованы алгоритмы восстановления скрытой фазы из главного значения градиента фазы
и исследована их эффективность на примере адаптивной фокусировки электромагнитной
волны, распространяющейся в случайно-неоднородной среде в условиях сильных
амплитудных флуктуаций. Проведено исследование процесса трансформации
аберрационного волнового фронта и точности алгоритмов восстановления фазы волны при
наличии сингулярностей волнового фронта. Разработанные алгоритмы могут быть
использованы при анализе интерферограмм, построенных на основе пар изображений,
полученных с помощью радаров с синтезированной апертурой. Результаты данной работы
опубликованы в [15-17].
Введение
В задачах интерферометрии, восстановления и реконструкции изображений, адаптивной
оптики возникает необходимость восстановления фазы волны либо из ее главного значения,
либо из градиента ее главного значения. В первом случае, например, для интерферометрических
радаров с синтезированной апертурой задача нахождения фазы [1-3] формулируется
следующим образом: найти оценку ; (i, k) двумерной фазы (i, k), заданной ее главным
значением (i, k)
(i, k) = P [(i, k)] = (i, k) 2n,
(1)
где i, k определяют положение пикселя в двумерном массиве дискретных значений фазы,
оператор P[…] означает приведение величины в скобках к интервалу главного значения фазы
[, ].
Без
дополнительных
предположений
восстановление
истинного
значения
фазы
невозможно, и мы имеем тривиальное решение ; = . Поэтому для получения оценки ;
обычно предполагают, что фаза не содержит разрывов, то есть ее значения в соседних узлах
дискретной сетки не могут различаться больше чем на . Можно показать, что в этом случае
ограниченный своим главным значением градиент главного значения фазы ; совпадает с
градиентом истинной фазы [2]
; (i, k) = (i, k),
(2)
где
; (i, k) = (P[(i + 1, k) (i, k)]; P[(i, k + 1) (i, k)] ) .
(3)
Из истинная фаза может быть найдена интегрированием ; вдоль произвольного пути.
Ситуация меняется, если присутствуют сильные шумы фазы, и условие ,
накладываемое на разность значений фазы в соседних узлах сетки, нарушается. Тогда поле
градиента ; перестает быть консервативным
;
и включает соленоидальную компоненту
; 0,
(4)
так что результат интегрирования ; начинает зависеть от выбранного пути.
В теории интерферометрических радаров с синтезированной апертурой для нахождения
фазы используются главным образом два метода: метод разрезов [1, 3] и метод наименьших
квадратов [2, 3]. В методе разрезов идентифицируются области в интерферограммах, где ;
и путь интегрирования при нахождении фазы из разностей фаз выбирается таким образом,
чтобы миновать эти области. Получаемое решение неоднозначно и зависит от того, каким
образом проведен разрез [3]. В методе наименьших квадратов отличие ; от трактуется
как шум
; = + n
и оценка истинной фазы находится путем минимизации квадратичной формы
Error!.
(5)
Вариационная задача (5) эквивалентна конечно разностному представлению уравнения
Пуассона
; = ;
с граничными условиями Неймана. Решение этого уравнения и, следовательно, метод
наименьших квадратов нахождения оценки истинной фазы легко реализуется на равномерной
сетке с помощью преобразования Фурье [4]. При этом граничные условия в уравнении (6) для
разностей фаз задаются с помощью периодического продолжения искомой функции за область
определения путем зеркального отображения исходной сеточной функции на сетку с удвоенной
размерностью [4, 5, 6].
Задача восстановления фазы по главному значению градиента главного значения фазы
(6)
возникает при использовании для измерений фазового фронта волны интерферометрических
датчиков или датчиков Гартмана в адаптивных оптических системах. В дискретном
представлении градиент фазы записывается в виде
Error! + Error! ,
(7)
где d – расстояние между соседними узлами сетки, ex, ey – единичные векторы. Однако, если
поле градиента фазы неконсервативно, то обычно применяемый для оценки фазы из разностей
фаз, найденных по локальным наклонам, метод наименьших квадратов приводит к потере уже
полезной информации о фазе, поскольку не позволяет учесть соленоидальную компоненту
градиента фазы (4), и восстановить так называемую «скрытую» фазу [7].
Действительно, если представить векторное поле градиента фазы g в виде суммы
потенциальной gp и соленоидальной gs компонент и подействовать на него оператором
дивергенции [8], то решение (5) получающегося в результате этого уравнения Пуассона (6)
будет соответствовать лишь потенциальной части поля g: ; = gp. В процессе работы над
проектом реализованы алгоритмы восстановления скрытой фазы из главного значения
градиента
фазы и исследована их эффективность на примере адаптивной фокусировки
оптической волны, распространяющейся в турбулентной атмосфере в условиях сильных
флуктуаций интенсивности.
Разработанные алгоритмы основываются на методе наименьших квадратов. Остановимся на
нем подробнее.
Восстановление фазы методом наименьших квадратов
В дискретном представлении градиент фазы в главном его значении определяется
формулой
Error! +
+ Error! , (8)
где (i, k) – значение фазы в узлах сетки, d – расстояние между соседними узлами сетки, ex, ey –
единичные векторы. Фаза находится из решения уравнения
2 = g
(9)
путем минимизации квадратичной формы
Error!
для чего необходимо найти решение системы линейных уравнений вида
(i + 1, k) + (i 1, k)+ (i, k + 1) + (i, k 1) + (i, k) =
= gx(i, k) + gy(i, k) gx(i 1, k) gy(i, k 1) = L(i, k).
Решение этой системы находится с помощью формулы
(10)
~ (l , m)
~
L (l , m)
l
m
2cos 2 cos 2 2
N
N
где ; (l, m) двумерное преобразование Фурье массива (i, k), а L;
двумерное
преобразование Фурье массива L(i, k), при этом граничные значения фазы задаются с помощью
периодического продолжения искомой функции за область определения путем зеркального
отображения исходной сеточной функции с размерностью NN на сетку с размерностью 2N2N.
Искомое значение фазы (i, k) находится с точностью до константы путем двумерного
обратного преобразования Фурье массива ; (l, m).
Алгоритм восстановления фазы методом наименьших квадратов позволяет хорошо
восстанавливать фазу в условиях слабых флуктуаций интенсивности. Действительно, если
представить векторное поле градиента фазы g в виде суммы потенциальной gp и соленоидальной
gs компонент и подействовать на него оператором дивергенции [8], то решение (10)
получающегося в результате этого уравнения Пуассона (9) будет соответствовать лишь
потенциальной части поля g: = gp и не позволит учесть соленоидальную компоненту
градиента фазы, связанную с дислокациями [7]. То есть алгоритм дает строгое решение лишь в
отсутствие дислокаций фазы. Для учета соленоидальной компоненты градиента фазы и
восстановления соответствующей части фазы, “скрытой” от метода наименьших квадратов,
разработан алгоритм нахождения скрытой фазы.
Алгоритм восстановления скрытой фазы,
основанный на локализации точек ветвления фазы
Представив градиент фазы в виде суммы потенциальной gp и соленоидальной gs компонент
g(r) = gp(r) + gs(r)
(11)
и подействовав на него оператором ротора, так как gp(r) = 0, получим
g(r) = gs(r) .
(12)
Из (12) следует, что нарушение консервативности поля градиента фазы связано с отличием от
нуля ротора соленоидальной компоненты градиента [2, 9, 7]. Неравенство нулю ротора
соленоидальной компоненты градиента фазы обусловливается наличием дислокаций.
Характерным признаком наличия дислокации в некоторой точке является то, что главное
значение градиента фазы при обходе вокруг этой точки по замкнутому контуру меняется на
2, и мы можем записать, воспользовавшись (8) [7]:
g(i, k) exd + g(i + 1, k)eyd g(i, k+ 1)exd g(i, k)eyd =
=
Error! .
Положительные и отрицательные точки ветвления фазы возникают попарно и связаны друг с
(13)
другом через разрывы фазовой поверхности в областях низкой интенсивности волны.
В случае непрерывных
функций с использованием теоремы Стокса
формулу (13) можно переписать в виде
Error!
Error! ,
(14)
где через C обозначена граница поверхности D. Контур C вокруг точки ветвления может быть
выбран сколь угодно малым и подынтегральную функцию в (14) можно аппроксимировать
выражением [4]
ez g(r) = 2(r rbp),
(15)
где вектор rbp определяет точку ветвления фазы.
Из (15), (12) следует, что
ez gs(r) = 2(r rbp).
(16)
Представим оценку фазы в виде [7]
(r) = lmse(r) + hid(r),
(17)
где через lmse(r) обозначена оценка истинной фазы по методу наименьших квадратов (10) и
которая соответствует потенциальной компоненте градиента фазы gp, hid(r) – скрытая фаза,
определяемая соленоидальной компонентой градиента фазы gs. Применяя операцию градиента в
правой и левой частях (17), с учетом (11), (15) получаем
hid(r) = 2(r rbp)ez.
(18)
Решение этого уравнения приведено в [7] и имеет вид
hid(r) = Im{log [(x xbp) + i(y ybp)]} .
(19)
В общем случае с учетом того, что положительные и отрицательные точки ветвления возникают
попарно, для hid имеем [7]
Error! ,
где xk, yk и x;k, y;k – соответственно координаты положительных и отрицательных точек
ветвления фазы, K – число пар. Алгоритм восстановления фазы методом наименьших квадратов
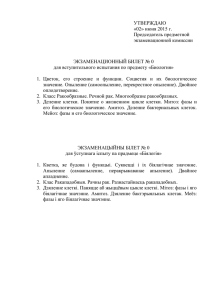
с учетом скрытой фазы по формулам (17), (10), (20) представлен на Рис. 1.
(20)
Рис. 1. Алгоритм восстановления фазы в условиях возникновения спекл-структуры
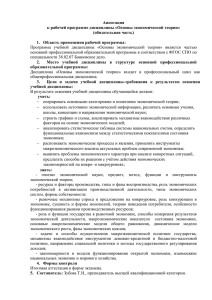
Рис. 2 иллюстрирует возможности описанного алгоритма. В части а рисунка дано
исходное распределение фазы, в части b – восстановленное с использованием данного
алгоритма. Из рисунка видно, что алгоритм позволяет восстанавливать фазу из градиента фазы с
высокой точностью, если удается правильно идентифицировать положение всех точек
ветвления и их парность. Но это не всегда можно сделать.
Алгоритм восстановления скрытой фазы с помощью экспоненциального
реконструктора
Другой алгоритм восстановления соленоидальной компоненты фазы не требует
нахождения местоположения точек ветвления. Этот алгоритм позволяет найти соленоидальную
компоненту непосредственно из градиента фазы и сводится к следующему.
Сначала методом наименьших квадратов рассчитываются потенциальная фаза lmse(r) и
ее градиент glmse (r) = lmse (r), а затем находится разность между полным градиентом фазы и
градиентом glmse [11],
gs(r) = g(r) - glmse (r).
(21)
Эта операция позволяет выделить соленоидальную компоненту градиента фазы. Фаза,
соответствующая этой компоненте, находится с помощью комплексного экспоненциального
реконструктора [12]. Данный реконструктор работает с комплексными числами exp(igs) и с
помощью него можно получить комплексные числа вида exp(icer). Таким образом, фазу,
полученную с помощью комплексного экспоненциального реконструктора можно определить
выражением
cer(r) = arg{CER[exp(igs(r))]},
(22)
где оператором CER[…] описывается работа алгоритма. Полное значение фазы
определяется по формуле
(r) = lmse(r) + cer(r).
(23)
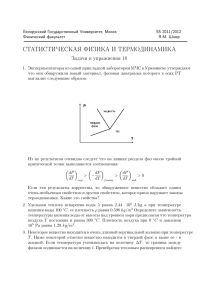
Анализ влияния винтовых дислокаций фазы на фокусировку лазерных
пучков
Турбулентность оказывает влияние на эффективность фокусировки лазерных пучков в
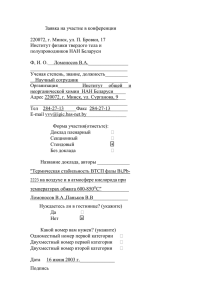
атмосфере. Какова при этом роль винтовых дислокаций можно понять из численного
эксперимента, схема которого изображена на Рис. 3a. Лазерный пучок распространяется через
турбулентную среду, которая моделируется с помощью тонких фазовых экранов [10], а затем
фокусируется с помощью тонкой линзы. Данная схема эквивалента схеме фокусировки пучка в
турбулентной атмосфере, изображенной на Рис.3 b
Путь распространения
Линза
Линза
Путь распространения
Случайные
фазовые
экраны
Случайные
фазовые
экраны
(a)
(b)
Рассматривались три версии комплексного поля для анализа влияния дислокаций на
фокусировку лазерного излучения:
Upc1(r) = A(r)exp{i((r) lmse(r)}
(24)
Upc2(r) = A(r)exp{i((r) [lmse(r) + hid(r)])}
(25)
Upc3(r) = A(r)exp{i((r) [lmse(r) + cer(r)])}
(26)
Поля (24)-(26) находились из поля U(r) = A(r)exp{i((r))}, полученного с помощью
моделирования. Поле Upc1 характеризует фокусировку оптической волны в случае, когда
скомпенсированы турбулентные флуктуации фазы, рассчитанной по методу наименьших
квадратов, и оставлены сингулярные искажения фазы (дислокации). Поля Upc2 и Upc3
характеризуют фокусировку оптической волны, когда все турбулентные искажения фазы
компенсируются, но соленоидальная компонента рассчитывается по разному: для поля Upc2 с
помощью алгоритма, основанного на нахождении точек ветвления, для поля Upc3 на основе
экспоненциального реконструктора. Эффективность фокусировки оценивалась по параметру
Штреля
St = I/I0,
(27)
определяемому отношением интенсивности света в фокусе линзы при распространении
излучения в турбулентной среде I к интенсивности I0 в фокусе линзы в однородной среде.
Турбулентные условия распространения характеризовались параметром
0;2 = 1,23 Cn;2 k7/6L11/6,
(28)
где k = 2/ волновое число, L длина трассы. Параметр 0;2 есть не что иное как дисперсия
флуктуаций интенсивности (индекс мерцаний) плоской волны, рассчитанная в первом
приближении метода плавных возмущений [13], и широко используется в качестве «единицы»
измерения интенсивности оптической турбулентности [14]
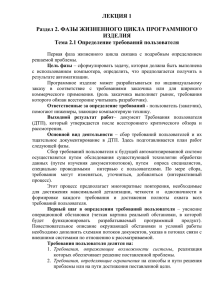
На Рис. 4 изображены результаты вычисления параметра Штреля для полей (24), (25), (26)
при разных размерах субапертур, на которых определяется градиент фазы. Из Рис.4 видно, что
дислокации фазы (компенсируется фаза, рассчитываемая методом наименьших квадратов)
приводят к существенному снижению интенсивности излучения в фокальной плоскости.
Кривая, соответствующая полю Upc1 почти совпадает с кривой, соответствующей полю U, где
флуктуации фазы вообще не компенсируются. То-есть ухудшение фокусировки пучка в
турбулентной
атмосфере
практически
полностью
определяется
дислокациями
фазы.
Эффективность фокусировки для лазерного пучка при определении полной фазы из её
градиентов выше по сравнению с алгоритмом, который определяет фазу с помощью нахождения
скрытой компоненты по точкам ветвления фазы при любых размерах субапертур (сравни
Рис. 4 а и 4 б).
(a)
(b)
Рис. 4. Параметр Штреля в зависимости от индекса мерцания
Заключение
Из результатов раздела «Анализ влияния винтовых дислокаций фазы на фокусировку
лазерных пучков» следует, что алгоритм восстановления фазы при наличии сингулярностей
основанный на экспоненциальном реконструкторе значительно точнее, чем алгоритм,
основанный на локализации точек ветвления фазы. При анализе интерферограмм изображений
земной поверхности, полученных с помощью ИРСА возникает трудноразрешимая проблема
идентификации парных точек ветвления для проведения соответствующих разрезов. Алгоритм,
основанный на экспоненциальном реконструкторе не требует нахождения точек ветвления
вообще, что позволяет надеяться, что его применение для анализа интерферограмм ИРСА
позволит существенно повысить точность построения изображений зондируемой земной
поверхности.
Литература
1.Goldstein R.M., Zebker H.A., and Werner C.L. Satellite radar interferometry: Two-dimension phase
unwrapping. Radio Science, vol.23, №4, pp.713-720, July-August 1988.
2.Bamler R., N. Adam, G. Davidson, D. Just. Noise-induced slope distortion in 2-D phase unwrapping
by linear estimators with application to SAR interferometry. IEEE Transactions on Geoscience and
Remote Sensing, vol.36, №3, pp.913-921, 1998.
3.Ghiglia D.C., and M.D. Pritt. Two-Dimensional Phase Unwrapping: Theory, Algorithms, and
Software. Wiley Interscience, New York, 1998.
4.Takajo H., and T. Takahashi. Least-squares phase estimation from the phase difference. J. Opt. Soc.
Amer. A, vol.5, №3, pp.416-425, 1988.
5.Лукин В.П., Б.В. Фортес. О влиянии дислокаций волнового фронта на нестабильность
фазового сопряжения при компенсации теплового самовоздействия. Оптика атмосферы и
океана, т.8, №3, с.435-447, 1995.
6.Лукин В.П., Б.В. Фортес. Адаптивное формирование пучков и изображений в атмосфере.
Новосибирск. Изд-во СО РАН, 1999, 212 с.
7.Fried D.L. Branch point problem in adaptive optics. J. Opt. Soc. Amer. A, vol.15, pp.2759-2768,
1998.
8.Herrman J. Least-squares wave front errors of minimum norm. J. Opt. Soc. Amer., vol.70, pp.28-35,
1980.
9.Aksenov V., V. Banakh, and O. Tikhomirova. Potential and vortex features of optical speckle fields
and visualization of wave-front singularities. Appl. Opt., vol.37, p.4536-4540, 1998.
10.В.А. Банах, А.В. Фалиц Восстановление фазы оптической волны, распространяющейся в
турбулентной атмосфере, из измерений разностей фаз. Оптика атмосферы и океана, т.14, №5,
с.424-431, 2001.
11.G.A. Tyler. ”Reconstruction and assessment of the least-squares and slope discrepancy component
of the phase,“ J. Opt .Soc. A, vol. 17, pp. 1828-1839, 2000.
12.D. Fried. Adaptive optics wave function reconstruction and phase unwrapping when branch points
are present. Optics Communications, vol. 200, p.43-72, 2001.
13.Татарский В.И. Распространение волн в турбулентной атмосфере. М., Наука, 1967.
14.Зуев В.Е., В.А. Банах, В.В. Покасов. Оптика турбулентной атмосферы. Гидрометеоиздат,
Ленинград, 1988.
15.Banakh V.A., Falits A.V. Comparison of phase reconstruction algorithms when branch points are
present. 9th International Symp. Remote Sensing. Optics in Atmospheric Propagation and Adaptive
Systems. Proc. SPIE, 2002, vol.4884, pp.107-113
16.Banakh V.A., Falits A.V. Reconstruction of phase of the wave propagating in atmosphere under
conditions of strong optical turbulence. IX Joint international Symposium “Atmospheric and Ocean
Optics. Atmospheric Physics.” Tomsk, July 2-5, 2002. Proceedings of SPIE, 2002, vol.5026, pp.84-89.
17.Aksenov V.P. and Tikhomirova O.V. Theory of singular-phase reconstruction for optical speckle
field in the turbulent atmosphere // J. Opt. Soc. Am. A. 2002. V.19. № 2. P.345–355.