- Информационно-вычислительные системы
реклама

ИНТЕФЕЙСЫ СИСТЕМ СБОРА ИНФОРМАЦИИ
И УПРАВЛЕНИЯ
Учебное пособие
Пенза 2014
Учебное пособие посвящено рассмотрению роли и места систем ввода- вывода
и интерфейсов АСОИУ в вычислительных системах, изложению принципов их
построения и функционирования. В нем подробно рассмотрена организация
систем ввода-вывода, способы обмена и принципы передачи информации в
вычислительных системах, системные, специализированные и малые
интерфейсы периферийных устройств .
Учебное пособие предназначено для студентов специальностей 230102,
230106, 230201. Пособие соответствует государственному образовательному
стандарту, а также программам обучения по дисциплинам «Организация ЭВМ
и систем», «Интерфейсы АСОИУ» и «Вычислительные машины и системы».
1
СОДЕРЖАНИЕ
Введение
1 Организация системы ввода-вывода вычислительной системы
2
3
1.1 Основы архитектурной организации вычислительной системы.
3
1.2 Системы ввода-вывода ПК
5
2 Способы обмена информацией между устройствами вычислительной
11
системы
2.1 Синхронный обмен данными
12
2.2 Асинхронный обмен данными
13
2.3 Основные режимы ввода-вывода
17
2.4 Структуры систем ввода – вывода
21
3 Основные принципы передачи информации в вычислительных
24
системах
3.1 Управление обменом информации
24
3.2 Среда передачи данных
28
4 Интерфейсы систем ввода-вывода.
33
4.1 Понятие интерфейса, назначение, характеристики. Реализация
интерфейсов
33
4.2 Классификация интерфейсов
41
4.3 Структурная организация интерфейсов
46
4.4 Селекция информационного канала
49
5 Реализация аппаратных интерфейсов: проблемы и технические
54
решения
5.1 Электромагнитные помехи
54
5.2 Характеристики линий связи
56
5.3 Системные интерфейсы
62
5.4 Стандартные периферийные интерфейсы
67
5.5 Малые периферийные интерфейсы
70
ЗАКЛЮЧЕНИЕ
77
2
ВВЕДЕНИЕ
При изучении систем ввода-вывода и интерфейсов АСОИУ необходимо
представлять основные принципы построения
средств вычислительной
техники, которые во многом определяются той элементной базой, на которой
строятся вычислительные системы общего и специализированного назначения.
С этой точки зрения весь период развития вычислительной техники от первого
компьютера до современных вычислительных машин можно разбить на два
этапа.
Первый – это этап до появления современных интегральных схем и
микропроцессоров.
Второй – после их появления и начала выпуска персональных
компьютеров (ПК).
На первом этапе компьютеры разрабатывались и изготавливались на
своей собственной элементной базе, их устройства (процессор, ОЗУ,
устройства управления и т.п.) имели архитектуру и структуру, присущую
только данному компьютеру или одному семейству, связь между устройствами
и узлами осуществлялась с помощью интерфейсов, используемых только этим
типом вычислительной машины. Стандарты применялись, но в основном
касались ПУ, а не внутренних устройств. Поэтому машины разных фирм были
не совместимы по элементной базе, устройствам и конструктивам. Это
относилось как к большим, так и к малым вычислительным машинам. Каждый
тип компьютера был в определенной степени уникален.
На втором этапе изменился принцип построения вычислительной
техники. Она стала основываться на правиле трех «М»: модульность,
микропрограммируемость и магистральность.
Модуль представляет собой функционально полное и конструктивно
законченное
устройство,
серийно
выпускаемое
и
программно
(микропрограммно) управляемое (настраиваемое). Вычислительные системы
3
собираются на основе этих модулей с помощью каналов связи – универсальных
или специализированных интерфейсов.
Существенно возросла роль стандартизации, без которой разработка и
выпуск вычислительных систем общего назначения стал просто невозможен, а
специализированного назначения – практически невозможен.
В последнее
время существенно возросли роль и значение систем ввода-вывода и
интерфейсов
составляющей
вследствие
по
усиления
сравнению
с
значимости
вычислительной
коммуникационной
составляющей
в
информационно-управляющих системах.
Учебное пособие посвящено рассмотрению роли и места систем вводавывода и интерфейсов АСОИУ в вычислительных системах, изложению
принципов их построения и функционирования.
Учебное пособие предназначено для студентов специальностей 230102,
230201.
1 ОРГАНИЗАЦИЯ СИСТЕМЫ ВВОДА-ВЫВОДА ВЫЧИСЛИТЕЛЬНОЙ
СИСТЕМЫ
1.1 Основы архитектурной организации вычислительной
системы
В основе архитектуры современных вычислительных машин (ВМ) лежит
представление алгоритма решения задачи в виде программы последовательных
вычислений. Согласно стандарту ISO 2382/1-84, программа для ВМ – это
упорядоченная последовательность команд, подлежащая обработке.
Вычислительная машина, где определенным образом закодированные
команды программы хранятся в памяти, известна под названием ВМ с
хранимой в памяти программой.
Ее главной особенностью стала концепция хранимой в памяти программы,
на долгие годы определившая базовые принципы построения последующих
4
поколений вычислительных машин. Относительно авторства существует
несколько версий, но поскольку в законченном виде идея впервые была
изложена в 1945 году в статье Джона фон-Неймана (John von Neumann «First
Draft of a Report on the EDVAC»), именно его фамилия фигурирует в
обозначении архитектуры подобных машин, составляющих подавляющую
часть современного парка ВМ и вычислительных систем (ВС).
Типичная фон-Неймановская вычислительная машина содержит: память,
устройство управления, арифметико-логическое устройство и устройства ввода
и вывода. На рис.1 ниже представлена модифицированная структура фонНеймановской ВМ, так как первоначально память не разделялась на основную
и вторичную (внешнюю) и не было портов ввода-вывода.
В любой ВМ имеются средства для ввода программ и данных к ним.
Информация поступает из подсоединенных к ЭВМ периферийных устройств
(ПУ) ввода. Результаты вычислений выводятся на периферийные устройства
вывода. Связь и взаимодействие ВМ и ПУ обеспечивают порты ввода и порты
вывода. Термином порт обозначают аппаратуру сопряжения периферийного
устройства с ВМ и управления им.
Введенная информация сначала запоминается в основной памяти, а
затем переносится во вторичную память, для длительного хранения. Чтобы
программа могла выполняться, команды и данные должны располагаться в
основной памяти (ОП), организованной таким образом, что каждое двоичное
слово хранится в отдельной ячейке, идентифицируемой адресом, причем
соседние ячейки памяти имеют следующие по порядку адреса.
5
Рис.1 - Модифицированная структура фон-Неймановской ВМ
1.2 Системы ввода-вывода ПК
Наиболее наглядно и полно можно проследить и прочувствовать проблемы
и тенденции развития систем ввода-вывода при рассмотрении ретроспективы
эволюции интерфейсов и структур систем ввода-вывода на примере
персональных компьютеров типа IBM PC
В начале эры персональных компьютеров частота работы процессора
составляла 10 МГц, при этом на выполнение даже самых простейших операций
процессор затрачивал несколько тактов. В таких условиях для обеспечения
бесперебойной работы процессора было достаточно всего 4 миллионов
обращений к памяти в секунду, что соответствовало циклу работы в 250 нс.
Этим условиям удовлетворяла одношинная структура систем ввода-вывода,
когда все устройства компьютера, включая ОЗУ, общались с процессором через
общую шину (рис.2a), которую называли системной. Все интерфейсы ПУ
подключались к этой шине. Наиболее распространенной системной шиной в
этот период стала сначала 8 разрядная, затем 16 разрядная шина ISA,
работающая на частоте 8 МГц.
С ростом частоты работы ПК и изменения времени доступа к ОЗУ
6
пропускная способность шины ISA стала тормозить работу процессора.
Решение проблемы нашли в выделении канала передачи данных МП-ОЗУ в
отдельную шину, построенную на базе внешнего интерфейса МП, и
изолированную от медленной шины
ISA
посредством контроллера шины
данных. Это повысило производительность работы центрального процессора.
Все ПУ продолжали взаимодействовать с центральным процессором через
системную шину (см. рис. 2б).
С дальнейшем ростом частоты работы МП тормозом в работе стало ОЗУ.
Тогда ввели дополнительную высокоскоростную кэш-память, что уменьшило
простои МП. На определенном этапе развития компьютеров стали широко
использовать мультимедиа. Сразу выявилось узкое место во взаимодействии
центрального процессора и видеокарты. Имеющиеся системные шины ISA,
ЕISA не удовлетворяли этим условиям.
Выход был найден с разработкой и внедрением высокоскоростных
локальных шин, посредством которых можно было связаться с памятью, на
этой же шине работали жесткие диски, что также повышало качество вывода
графической
информации.
Первой
такой
шиной
была
шина
VL-bus,
практически повторявшая интерфейс МП i486. Затем появилась локальная
шина
РСI.
Она
была
процессорно-независимой
и
поэтому
получила
наибольшее распространение для последующих типов МП. Эта шина имела
частоту работы 33 МГц и при 32-х разрядных данных обеспечивала
пропускную способность в 132 Мбайт/сек (см. рис. 2 в). Системная шина ISA
по-прежнему использовалась в компьютерах, что позволяло применять в новых
компьютерах огромное количество ранее разработанных аппаратных и
программных средств.
В такой системе ввода-вывода различные ПУ подключались к разным
шинам. Медленные - к ISA, а высокоскоростные - к РСI. С появление шины РСI
стало целесообразным использовать высокоскоростные параллельные и
последовательные интерфейсы ПУ (SCSI, ATA, USB).
7
На этом этапе системной стали называть шину МП, через которую он
взаимодействовал с ОЗУ. Шина РСI и ISA и подобные другие назвали шинами
ввода-вывода или шинами расширения. Действительно, эти шины как бы
расширяли число устройств, работающих с ЦПр, и их основной функцией стало
обеспечение процессов ввода и вывода информации.
8
Рис. 2. - Эволюция шинной архитектуры
Появление шины РСI не сняло всех проблем по качественному выводу
визуальной информации для 3-х мерных изображений, "живого" видео. Здесь
уже требовались скорости в сотни Мбайт/сек.
В 1996г. фирма Intel разработала новую шину AGP, предназначенную
только для связи ОЗУ и процессора с видеокартой монитора. Эта шина
обеспечивала
пропускную
способность
в
сотни
Мбайт/сек.
Она
непосредственно связывала видеокарту с ОЗУ минуя шину РСI.
Ей на смену пришла абсолютно новая шина PCI Express, или PCI-E (также
известная как 3GIO for 3rd Generation I/O; не путать с PCI–X или PXI) — это
компьютерная шина, использующая программную модель шины PCI и
высокопроизводительный
физический
протокол,
основанный
на
последовательной передаче данных.
В отличие от шины PCI, использовавшей для передачи данных общую
шину, PCI Express , в общем случае, является пакетной сетью с топологией
типа звезда, устройства PCI Express взаимодействуют между собой через среду,
9
образованную коммутаторами, при этом каждое устройство напрямую связано
соединением типа точка-точка с коммутатором.
Кроме того, шиной PCI Express поддерживается:
горячая замена карт;
гарантированная полоса пропускания (QoS);
управление энергопотреблением;
контроль целостности передаваемых данных.
Официально первая базовая спецификация PCI Express появилась в июле
2002 года.
Таким образом,
спустя
годы
снова пришли к многомагистральной
структуре ввода-вывода с радиально-магистральными интерфейсами ПУ. Все
шины систем ввода-вывода объединяются
в единую транспортную среду
передачи информации с помощью специальных устройств - мостов.
Мост – устройство, применяемое для объединения шин, использующих
разные или одинаковые протоколы обмена. Мост – это сложное устройство,
которое осуществляет не только коммутацию каналов передачи данных, но и
производит управление соответствующими шинами. Для
обеспечения
выполнения функций интерфейсов, входящих в систему ввода-вывода,
применяются специальные контроллеры и схемы. К ним можно отнести
контроллеры прерываний и прямого доступа к памяти, таймер, часы реального
времени, буферы шин данных, дешифраторы, мультиплексоры, регистры и
другие логические устройства.
В
первых
компьютерах,
построенных
с
использованием
микропроцессоров, контроллер и другие устройства строились на базе набора
интегральных схем малой, средней и большой степени интеграции. Адаптеры,
таймер и др. выпускались в виде отдельных микросхем (8250, 8255, 8259, 8237
и т.д.). С повышением производительности компьютеров и увеличением
степени интеграции все вышеперечисленные устройства и схемы стали
объединяться в микросхемы со сверхбольшой степенью интеграции, образуя
10
специальные наборы интегральных схем, называемых «чипсет» (ChipSet).
В
настоящее
время
управление
потоками
передаваемых
данных
производится с помощью мостов и контроллеров, входящих в ChipSet. Именно
ChipSet определяет основные особенности архитектуры компьютера и,
соответственно, достигаемый уровень производительности в условиях, когда
лимитирующим фактором становится не процессор, а его окружение – память и
система ввода-вывода. Принято называть две главные микросхемы южный
мост и северный мост. Северный мост обслуживает системную шину, шину
памяти, AGP и является главным контроллером PCI. Южный мост обслуживает
работу с ПУ (шины PCI, IDE).
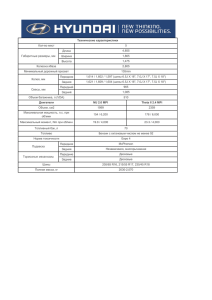
Для компьютеров среднего класса, использующих процессоры Celeron,
Pentium II и Pentium III, фирма Intel выпускала чипсет с архитектурой i810,
состоящий из 3-х микросхем. Современные чипсеты поколения Core 2 для
настольных машин - Intel P55 Express (2011г.) имеют пропускную способность
2 ГБайт/с, по шине Direct Media Interface, сокр. DMI линии PCI Express. Чипсет
Intel P55 Express (рис. 3) представляет собой однокристальное решение,
которое заменяет собой традиционные северный и южный мосты.
11
Рис. 3. - Структурная блок-схема чипсета Intel P55 Express
Кроме контроллера шины DMI, используемой для связи с процессором, в
чипсете Intel P55 Express имеется 6-портовый контроллер SATA II c
поддержкой технологии Intel Matrix Storage 9.0 и возможностью создания
RAID-массивов уровней 0, 1, 5, 10 и JBOD. Также чипсет Intel P55 Express
поддерживает восемь линий PCI Express 2.0, которые могут применяться для
интегрированных на материнскую плату контроллеров и организации слотов
PCI Express 2.0 x1 и PCI Express 2.0 x4.
2 СПОСОБЫ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ УСТРОЙСТВАМИ
ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ
В данной главе рассматривается обмен между ядром вычислительной системы
и элементами системы ввода-вывода. Обмен производится с точки зрения
программы,
выполняющейся
на
центральных
процессорах,
которая
взаимодействует с блоками СВВ через порты ввода вывода.
12
Все многообразие способов такого обмена можно разделить на несколько
видов:
1. Программно управляемые:
• Синхронный.
• Асинхронный с программной проверкой готовности (программный
полинг, «по опросу»).
• Асинхронный с аппаратной проверкой готовности (обмен по
прерыванию).
2. В режиме прямого доступа (без участия центральных процессоров).
2.1 Синхронный обмен данными
Синхронизация определяет согласование процессов взаимодействия между
функциональными устройствами системы. Рассмотрим особенности выполнения
процессов взаимодействия составных элементов системы.
Синхронный
обмен
данными
предполагает
отсутствие
ситуации
неготовности обменивающихся сторон. Например, при чтении данных из порта
предполагается, что устройство всегда готово передать их читающей стороне.
При записи в порт, наоборот, устройство всегда готово принять данные. При
синхронном обмене им полностью управляет программа, а элемент СВВ, с
которым происходит взаимодействие, никак не может повлиять на ход обмена.
Т.е., даже если устройство работает с задержками, то эти задержки учитывает
программа, которая с ним взаимодействует, но само устройство не имеет никакой
возможности сообщить программе о своей готовности или неготовности.
Основные достоинства:
• Синхронный обмен – самый быстрый из всех
рассматриваемых в данном разделе.
• Синхронный обмен требует минимум аппаратного обеспечения.
Основной минус: синхронный обмен сложно (или вообще невозможно)
организовать с асинхронными устройствами (т.е. с устройствами, имеющими
13
разное время выполнения операций и/или множество производимых операций с
сильно различающимися временами выполнения).
Два или более процесса являются синхронными, если смены состояний этих
процессов взаимонезависимы и выполняются через одинаковые фиксированные
интервалы времени. Взаимодействие функциональных устройств при этом
рассматривается как совокупность процессов передачи информации источником
и
приема
этой
информации
одним
или
несколькими
приемниками.
Синхронизация процесса взаимодействия заключается в том, что интервал
времени смены состояния процесса передачи заведомо не может быть меньше
самого длительного интервала времени изменения состояния процесса приема.
2.2 Асинхронный обмен данными
Два или более процесса являются асинхронными, если смены состояний этих
процессов взаимозависимы, а время изменения состояния одного процесса
определяется временем смены состояния другого процесса. При асинхронном
взаимодействии между процессами передачи и приема существует отношение
предшествования. Асинхронный принцип не означает, что синхронизация
отсутствует, при асинхронном
принципе период синхронизации является
переменным, а при синхронном этот период постоянен и определяется частотой
работы самого медленного устройства.
Реализация асинхронных процессов взаимодействия основывается на
принципе обратной связи, которая может быть однопроводной и двухпроводной.
Процессы взаимодействия интерфейсных блоков образуют иерархическую
структуру. Уровни иерархии процессов взаимодействия соответствуют иерархии
структурных
системы.
элементов информации,
Процессам
взаимодействия
передаваемой
различных
между устройствами
уровней
иерархии
соответствуют различные операции синхронизации. Можно выделить три
процесса синхронизации передачи: битов слова, слов и массивов слов.
14
Синхронизация битов слова выполняется при параллельной передаче
многоразрядных кодов. Ее необходимость обусловливается переходными
процессами установления сигналов в линиях информационного канала из-за
разброса параметрических характеристик приемопередающих элементов линий
связи. Если известен разброс времени переходного процесса установления
сигнала в одной линии информационной шины, то совокупность переходных
процессов в каждой линии процесса передачи слова информации по отношению
к процессу приема можно представить как совокупность детерминированных
процессов. Процесс приема передаваемого слова синхронизируется специальным
стробирующим сигналом от источника данных или приемника, выдаваемым с
фиксированной задержкой по отношению к моменту выдачи всех разрядов кода
слова. Время задержки
= max{ t1,t1} - min{ t1,t1}
где
{t1,t1}
— длительность переходного процесса формирования
синхронизирующего импульса (строба) определяется источником информации
или внутренним тактирующим генератором приемника (рис. 4).
15
Рис. 4. - Временная диаграмма синхронизации передачи битов слова: СИ –
синхронизация источника.
Рис. 5. - Временная диаграмма синхронизации передачи слов без обратной
связи: ШД — шина данных; СИ — синхронизация источника
Синхронизация
передачи
слова
определяет
такие
технические
характеристики интерфейса, как возможность взаимодействия одного источника
с несколькими приемниками, максимальная скорость передачи и допускаемая
длина линий связи. На этом уровне используются два основных способа
синхронизации передачи: без обратной связи (рис. 5) и с обратной связью.
16
Схема синхронизации без обратной связи выполняется на основе одного
общего или отдельных тактирующих генераторов высокой стабильности.
Необходимым условием реализации способа является наличие отдельной линии
стробирования.
интерфейсах
с
Способ
используется
побитным
принципом
в
основном
передачи.
в
последовательных
Основной
недостаток
синхронного способа заключается в том, что скорость выдачи данных
источником не может быть больше скорости приема этих данных самым
медленнодействующим приемником. Этот недостаток может быть исключен
благодаря применению в интерфейсных блоках модульных буферных ЗУ,
например, со стековым механизмом записи и считывания.
Способы технической реализации обратной связи в схемах синхронизации
можно разделить: по характеру сигналов стробирования и обратной связи на
импульсные (рис. 6, а) и потенциальные (рис. 6,б,в); по числу контуров обратной
связи на однопроводные (рис. 6,а,б), двухпроводные (рис. 6,в).
17
Рис. 6. Временные диаграммы синхронизации передачи слов с обратной
связью: СИ — синхронизация источника; ГП — готовность приемника; ДП —
данные; приняты; ШД — шина данных;
Применение обратной связи позволяет гибко адаптироваться к изменению
скорости передачи информации и наиболее полно использовать пропускную
способность информационного канала, который в асинхронном режиме
функционирует с быстродействием, максимальным для каждого устройства
системы. Основными недостатками асинхронного способа по сравнению с
синхронным являются в ряде случаев более низкая скорость передачи и
необходимость введения дополнительных линий обратной связи. Важным
качеством
синхронизации
с
обратной
связью
является
возможность
одновременной передачи информации от одного источника к нескольким
приемникам. Число необходимых линий синхронизации для выполнения данной
функции зависит от наличия в устройствах интерфейса буферных регистров. При
их наличии достаточна однопроводная обратная связь.
При отсутствии буферных регистров используется двухпроводная обратная
связь. Сигнал на второй линии обратной связи (в данном случае сигнал ДП)
выполняет
функции
сигнализации
окончания
приема
слова
данных
и
формируется аналогично сигналу на линии обратной связи для однопроводного
варианта. Подобный способ синхронизации принят в интерфейсе IEC 625-1.
Синхронизация передачи массива слов является процессом синхронизации
верхнего уровня. Процессы передачи массива могут быть детерминированными
или стохастическими. К детерминированным относятся процессы передачи
массива слов фиксированной длины (от одного до нескольких тысяч слов за
сеанс связи), к стохастическим— переменной длины. В первом случае
используется
синхронный
принцип
сигнализации
окончания
процесса
взаимодействия, во втором — асинхронный.
2.3 Основные режимы ввода-вывода
18
Для учета особенностей реализации процессов ввода-вывода и специфики
различного типа ПУ используются три режима ввода-вывода информации:
программный ввод-вывод, ввод-вывод в режиме прерываний и с прямым
доступом к памяти.
Интерфейсы должны учитывать возможность реализации всех 3-х
режимов ввода-вывода. Программный ввод-вывод. Здесь инициализация и
управление процессом ввода-вывода осуществляет процессор. Существует
три способа его выполнения.
Рис.7. - Программный ввод-вывод
Первый способ – прямой, используется для синхронных ПУ, т.е.
устройств, которые всегда готовы к работе и циклов ожидания не требуется.
Второй – условный с занятием цикла, когда при не готовности ПУ, процессор
ждет до тех пор, пока наступит его готовность. Третий – условный с
совмещением. В отличие от предыдущего, процессор не ждет готовности ПУ,
а переходит к продолжению программы с периодической проверкой
готовности ПУ.
Ввод-вывод в режиме прерываний. В этом случае инициатором начала
процесса ввода-вывода является ПУ. Оно, когда готово, подает сигнал
процессору "запрос на прерывание". Процессор, если ПУ разрешен такой
режим, завершает текущую команду и переходит к выполнению процесса
19
ввода-вывода (см. рис. 8).
Рис.8. - Ввод-вывод в режиме прерывания
Сначала он осуществляет контекстное переключение, т.е. запоминает свое
состояние, чтобы можно было после продолжить программу, идентифицирует
ПУ и передает управление драйверу данного ПУ (ПП), который и
осуществляет ввод или вывод информации. Идентификация ПУ производится
с помощью адреса вектора прерывания, который содержит номер ячейки, где
хранится первая команда этого драйвера. Адрес вектора прерывания ПУ
20
передается процессору от контроллера прерываний.
Следует
отметить
два
момента.
Во-первых,
ПУ
должно
иметь,
предварительно установленное, разрешение на работу в режиме прерываний.
Во-вторых, возможны коллизии, когда несколько ПУ выставляют процессору
запрос прерывания. Эта коллизия разрешается с помощью механизма задания
уровня приоритетов для каждого ПУ. Возможна организация вложенных
прерываний, когда ПУ с большим приоритетом прерывает работу ПУ с
меньшим приоритетом. Все эти моменты должен учитывать стандарт на
интерфейс.
Прямой доступ к памяти (см. рис. 9). Этот режим используется для
высокоскоростных ПУ. В этом режиме активным устройством является
контроллер прямого доступа к памяти (КПДП). Процессор, получив от КПДП
заявку на прямой доступ, прерывает свою работу и отключается от
интерфейса, передавая его задатчику, т.е. КПДП. Процессор при этом не
выполняет контекстного переключения, а может продолжать свою работу,
если она не требует интерфейса. Управление интерфейсом переходит к КПДП,
который посредством выполнения операций чтения и записи передает
информацию между ОЗУ и ПУ с соответствующим заданием адресов памяти.
В этом режиме используется механизм задания уровня приоритетов для тех
ПУ, которые работают с прямым доступом к памяти. Этот режим также
должен быть предусмотрен в интерфейсах.
Как
следует
из вышеизложенного,
канал
ввода-вывода
(главный
контроллер) реализует функции управления общие для всех ПУ, а контроллер
внешнего интерфейса учитывает специфику интерфейса, связывающего его с
соответствующим ПУ.
В компьютерах, которые работают с малой интенсивностью ввода-вывода,
главный контроллер (канал) ввода-вывода обычно отсутствует, а его функции
берет на себя процессор. В этом случае процессор работает непосредственно с
контроллером ввода-вывода ПУ, что упрощает структуру компьютера.
21
При работе с высокоскоростным ПУ обычно используется режим прямого
доступа к памяти. Для этого режима аппаратно реализуется специальный
канал ввода-вывода в виде КПДП.
Рис. 9. - Режим прямого доступа к памяти
2.4 Структуры систем ввода – вывода
Структура
систем
ввода-вывода
представляет
собой
совокупность
взаимосвязанных внутренних и внешних интерфейсов (шин), посредством
которых все устройства (модули) объединены в единую систему, называемую
компьютером.
22
Причем каждая шина имеет определенную скорость передачи информации, и
к ней подсоединяются устройства с соответствующим быстродействием. Все
шины, как правило, могут работать параллельно, обеспечивая высокую
производительность вычислительной системы. Шины соединяются между собой
с помощью специальных устройств – мостов.
Кроме того, в структуру систем ввода-вывода входят устройства управления
шинами и схемы организации процессов передачи информации при различных
режимах ввода-вывода.
В процессе развития вычислительной техники формировалась структура
самого компьютера и его систем ввода-вывода, разрабатывались и внедрялись
различные типы интерфейсов.
Из поколения в поколение менялась элементная база и архитектура
компьютеров.
К
моменту
появления
микропроцессоров
(МП),
больших
интегральных схем (БИС) и персональных компьютеров уже сформировались
определенные принципы построения и структуры систем ввода-вывода (см.
рис.10).
В больших компьютерах класса «Мейнфрейм» (IBM-360/370, ЕС ЭВМ),
работающих в мультипрограммном режиме и имеющих мощный процессор,
большой емкости ОЗУ и много разнообразных ПУ, уже много лет успешно
используется многомагистральная структура с выделенными каналами вводавывода и каскадно-магистральным подключением ПУ (см. рис. 10 а). В таких
машинах, как правило, используются
специализированные
каналы ввода-
вывода: мультиплексный, работающий с медленными ПУ и селекторный,
обслуживающий
быстродействующие
ПУ.
Такая
структура
позволила
максимально использовать вычислительную мощность компьютера за счет
одновременного решения нескольких задач и параллельной работы процессора и
каналов ввода-вывода.
В таких компьютерах аппаратно реализовывались все функции
управлению потоками данных. В них
по
система ввода-вывода содержит
23
оптимальный набор из нескольких типов интерфейсов. Высокоскоростные
интерфейсы процессора и ОЗУ, через которые взаимодействуют основной
процессор,
специализированные
процессоры,
блоки
оперативной
памяти
обеспечивают максимально эффективное использование процессорного времени.
Интерфейсы ввода-вывода, аппаратно реализованные каналы ввода-вывода и
контроллеры ПУ, освобождают центральный процессор от процедур управления
вводом-выводом. Интерфейсы ПУ предназначаются
для подключения ПУ к
компьютеру.
а)
24
б)
Рис. 10 - Структура систем ввода-вывода
В то же время, система ввода-вывода малых вычислительных машинах типа
DEC PDP-11, СM ЭВМ, которые были намного дешевле больших, строилась по
одномагистральной структуре с распределенным каналом ввода-вывода и
радиально-магистральным подключением ПУ (см. рис. 10 б). Функции
управления вводом-выводом выполнял процессор. В качестве высокоскоростного
канала применялся контроллер прямого доступа к памяти. Существовали
стандарты на используемые внутримашинные системные шины, например,
Unibus фирмы DEC (отечественный аналог – «Общая шина»).
С появлением МП и БИС наступил новый этап развития структур систем
ввода-вывода, обусловленный новым принципом построения вычислительных
машин на основе модульности, микропрограммируемости и магистральности.
Новый этап повторял стадии развития предыдущего, но на качественно новой
элементной базе и других подходах к компоновке компьютеров.
С развитием элементной базы компьютеров, повышением скорости работы
микропроцессоров
и
микросхем
памяти,
увеличением
емкости
ОЗУ
совершенствовалась и изменилась структура системы ввода-вывода информации,
повышалась скорость работы интерфейсов. Развитие интерфейсов и систем
ввода-вывода было направлено на минимизацию потерь в производительности
компьютера, вызванных задержками в передаче информации между его
модулями (устройствами), т.е. передач процессор - ОЗУ, процессор - ПУ, ПУ –
25
ОЗУ.
3 ОСНОВНЫЕ ПРИНЦИПЫ ПЕРЕДАЧИ
ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМАХ
ИНФОРМАЦИИ
В
3.1 Управление обменом информации
В процессе работы компьютера передача информации по одному и тому же
интерфейсу в один и тот же момент времени идет только между двумя
устройствами (модулями) по принципу «точка-точка». При этом одно из
устройств является активным (ведущим, задатчиком), другое – пассивным
(исполнителем, ведомым).
Активное устройство начинает процедуру обмена и управляет ею. Пассивное
устройство выполняет предписания активного.
В компьютере одни устройства всегда является задатчиками (активными),
другие только исполнителями (пассивными), третьи в разные моменты времени
могут быть как задатчиками, так и исполнителями. Процессор всегда активное
устройство, оперативная память (ОЗУ) – пассивное устройство. Периферийные
устройства при работе с процессором являются исполнителями, а при работе с
ОЗУ (прямой доступ к памяти) – задатчиками. Возможна передача между двумя
ПУ, тогда одно – задатчик, другое – исполнитель (см. рис.11 а). Таким образом,
пассивными устройствами являются либо ОЗУ, либо ПУ. Со стороны процессора
средства управления этими двумя типами устройств существенно различны. Это
обусловлено тем, что для передач процессор-ОЗУ заранее известны все типы и
параметры устройств, которые должны соединяться между собой, т.к. эти
устройства однотипны, в то время как ПУ существенно различаются, как по
задержке, так и по пропускной способности. Кроме того, процесс управления ПУ
намного сложнее и требует большего времени и учета специфики работы.
26
Рис.11. - Управление обменом информации
Поэтому управление передачей процессор - ОЗУ реализуется в рамках
одной компьютерной команды на уровне микрокоманд (см. рис. 11 б), а
управление процессом ввода-вывода с учетом специфики ПУ с помощью
специальной подпрограммы, которая называется драйвером и содержит как
команды компьютера, так и команды управления, специфичные для каждого
типа ПУ.
Передача информации от задатчика к исполнителю реализуется операцией
записи, а обратная – операцией чтения. Процесс передачи между ПУ и ЦПр
называют вводом-выводом информации.
Ввод реализуется с помощью операции чтения, а вывод – операцией записи.
Для минимизации загрузки процессора при выполнении процессов вводавывода функции управления распределяются на несколько устройств:
процессор, главный контроллер (канал) ввода-вывода, контроллер ПУ и блок
управления ПУ.
27
Главный контроллер и контроллеры различного типа ПУ вместе с
соответствующим программным обеспечением образуют Систему вводавывода.
Процессор, главный контроллер, контроллеры ПУ находятся в системном
блоке, а блок управления ПУ – в самом периферийном устройстве, в ряде
случаев контроллер ПУ может находиться в самом ПУ. Такое распределение
позволяет оптимизировать загрузку каждого вида устройств присущими ему
функциями при мультипрограммном режиме работы
компьютера. Это
происходит за счет совмещения во времени работы различных по функциям
устройств. Функциональная схема передачи информации в компьютере
показана на рис.12.
1. Состояние главного контроллера
6. Команда драйвера
28
2. Команда ввода-вывода
7. Команда главного контроллера
3. Адрес контроллера ввода-вывода
8. Состояние периферийных устройств
4. Состояние контроллера ввода-вывода
9. Приказ периферийному устройству на выполнение операции вводавывода
5. Адрес вектора прерывания
10. Выполнение операции ввода-вывода
Рис.12. - Функциональная схема передачи информации.
Операцию
ввода-вывода
начинает
процессор,
выдавая
в
главный
контроллер ввода-вывода соответствующую команду (2). Предварительно, с
помощью слова состояния канала, процессор должен убедиться, что он готов к
работе (1).
Канал приступает к управлению вводом-выводом с помощью специальной
программы канала. После чего процессор отключается от процесса вводавывода и функции управления принимает на себя канал.
Канал, после анализа слова состояния (4) соответствующего контроллера о
его готовности, передает ему управляющий приказ (команду канала) (6,7) и
может переходить к работе с контроллером другого ПУ. Контроллер ПУ
принимает эстафету управления вводом-выводом, формирует и передает в блок
управления ПУ необходимый управляющий код (сигнал) (8,9), получив
который ПУ преступает к процессу передачи данных (10).
Как следует из рассмотрения, каждый уровень управления вводомвыводом
должен иметь регистры управления, состояния и данных для
реализации своих действий по передаче информации.
При реализации такой многоуровневой системы управления вводомвыводом
для связи устройств между собой используется два вида
интерфейсов: системные интерфейсы (внутренние) для взаимосвязи модулей в
системном блоке и внешние интерфейсы ПУ (интерфейс периферийных
устройств) для подсоединения ПУ к системному блоку.
29
3.2 Среда передачи данных
Под средой передачи данных понимают физическую субстанцию, по
которой происходит передача электрических сигналов, использующихся для
переноса той или иной информации, представленной в цифровой форме.
Среда передачи данных может быть естественной и искусственной.
Естественная среда - это существующая в природе среда; чаще всего
естественной средой для передачи сигналов является атмосфера Земли, но
возможно также использование других сред - безвоздушного пространства,
воды,
грунта,
корабельного
корпуса
и
т.д.
Соответственно под
искусственными понимают среды, которые были специально изготовлены для
использования
в
качестве
среды
передачи
данных.
Представителями
искусственной среды являются, например, электрические и оптоволоконные
(оптические) кабели.
Искусственные среды. Классификация и применение
Типичными
и
наиболее
распространенными
представителями
искусственной среды передачи данных являются кабели. Основными видами
кабелей являются: волоконно-оптический (fiber), коаксиал (coaxial) и витая
пара (twisted pair). При этом и коаксиал, и витая пара для передачи сигналов
используют металлический проводник, а волоконно-оптический кабель световод, сделанный из стекла или пластмассы. Так же для передачи
слаботочных сигналов в электронике применяют углеродные волокна
(carbon fibers). Такая среда применяется, для соединения усилителей мощности
с акустическими колонками класса high-end.
Коаксиальный кабель
Коаксиальный кабель(coaxial) - способен передавать в один и тот же момент
множество сигналов. Каждый такой сигнал называется каналом. Все каналы
организуются на разных частотах, поэтому они не мешают друг другу.
Коаксиальный кабель обладает широкой полосой пропускания; это означает,
что в ней можно организовать передачу трафика на высоких скоростях. Он
30
также устойчив к электромагнитным помехам (по сравнению с витой парой) и
способен передавать сигналы на большое расстояние.
Коаксиальный кабель состоит из нескольких частей: 1) внутри кабеля –
центральная жила (проводник, сигнальный провод, линия, носитель сигнала,
внутренний проводник); 2) изоляционный материал (диэлектрик); 3) тонкий
металлический экран, который охватывает диэлектрик; 4) пластиковая
оболочка - внешняя часть кабеля.
Различают толстый (диаметром 0.5 дюйма) и тонкий (диаметром 0.25
дюйма) коаксиальные кабели. Заметим также, что существуют такие
разновидности коаксиального кабеля, кактвинаксиал, тринаксиал, quad-кабель
и т.д.
Витая пара
Витая пара (TP - twisted pair) - кабель, в котором изолированная пара
проводников скручена с небольшим числом витков на единицу длины.
Скручивание осуществляется для уменьшения внешних наводок (наводок от
внешних источников) и перекрестных наводок (наводок от одного проводника
другому проводнику из одной и той же пары).
Преимущества витой пары: кабель более тонкий, гибкий и его проще
устанавливать, а так же он недорог.
Недостатки: сильное воздействие внешних электромагнитных наводок,
возможность утечки информации и сильное затухание сигналов.
Типы витой пары: 1) неэкранированная (UTP - unshielded twisted pair) - не
содержит никаких экранов; 2) экранированная (STP - shielded twisted pair) имеет экран вокруг каждой витой пары и еще один экран, охватывающий все
витые пары (если это кабель S-STP).
Стандарты TIA/EIA-568, 568А определяют 7 категорий для витой пары.
Самая младшая (Категория 1) соответствует аналоговому телефонному каналу,
31
а старшая (Категория 7) характеризуется максимальной частотой сигнала в 600
МГц, при этом Категории 1…3 выполняются на UTP, а 4…7 - UTP и STP.
Волоконно-оптический кабель
Волоконно-оптический кабель (fiber-optic cable) имеет огромную ширину
полосы пропускания и может пересылать голосовые сигналы, видеосигналы и
сигналы данных на очень большие расстояния. Для передачи данных
использует световые импульсы, поэтому невосприимчив к электромагнитным
помехам. Обеспечивает высокую безопасность информации, поскольку
необходимо физически подключиться к линии связи. Недостатки: высокая
стоимость
и
меньшее
число возможных перекоммутаций,
из-за
риска
появления микротрещины в месте коммутации, что ведет к ухудшению
качества оптоволокна.
Структура волоконно-оптического кабеля: в его центре располагается
стержень, или сердцевина, которая окружена оптической оболочкой, которая, в
свою очередь, окружена буферным слоем (слоем лака), элементов усиления и
внешнего покрытия. Стержень и оболочка изготавливается как одно целое.
Внешнее покрытие изготавливается аналогично покрытию электрических
кабелей.
Волоконно-оптический кабель бывает одномодовым и многомодовым.
Одномодовый имеет меньший диаметр световода (5-10 мкм) и допускает
только прямолинейное распространение светового излучения (по центральной
моде). В стержнемногомодового кабеля свет может распространяться не только
прямолинейно (по нескольким модам). Чем больше мод, тем уже пропускная
способность кабеля. Так, на 100 ммаксимальная частота сигнала на длине
волны 850 нм для многомодового составляет 1600 МГц, для одномодового 888 ГГц. Стержень и оболочка многомодового кабеля изготовлены из стекла
или пластика, у одномодового - только из стекла. Для одномодового кабеля
источником света является лазер, для многомодового - светодиод.
32
Одномодовый кабель обладает наилучшими характеристиками, но и
является самым дорогим. Многомодовый кабель из пластика является самым
дешевым, но обладает самыми худшими характеристиками.
Естественные среды передачи данных
Наиболее используемая естественная среда - атмосфера. Наибольшее
распространение в качестве носителей данных в атмосфере получили
электромагнитные волны. Спектр электромагнитного излучения делится на
радиоизлучение, инфракрасное излучение, видимый свет, ультрафиолетовое
излучение,
рентгеновское
излучение,
гамма-излучение. А
используемые
радиоволны зависят от длины волны: сверхдлинные (декакилометровые),
длинные (километровые), средние (гектаметровые), короткие (декаметровые),
метровые,
дециметровые,
субмиллиметровые. Последние
ультракороткими
волнами.
сантиметровые,
пять
Кроме
диапазонов
того,
в
миллиметровые,
принято
последние
называть
три
диапазона
входит СВЧ-излучение (а по некоторым источникам - и часть дециметрового
диапазона 0.3…0.1 м).
Радиоканал использует передачу информации по радиоволнам, поэтому в
теории может обеспечить связь на многие десятки, сотни и тысячи километров.
Скорость передачи достигает десятков мегабит в секунду (зависит от
выбранной длины волны и способа кодирования).
Особенность радиоканала – сигнал свободно излучается в эфир, он не
замкнут в кабель, поэтому возникают проблемы совместимости с другими
источниками радиоволн (радио и телевещательными станциями, радарами и
т.д.). В радиоканале используется передача в узком диапазоне частот и
модуляция информационным сигналом сигнала несущей частоты.
Главные недостатки радиоканала - его плохая защита от прослушивания, так
как
радиоволны
распространяются
неконтролируемо,
и
слабая
помехозащищенность.
33
Для локальных беспроводных сетей (WLAN – Wireless LAN) в настоящее
время применяются подключения по радиоканалу на небольших расстояниях
(обычно до 100 метров) и в пределах прямой видимости. Чаще всего
используются два частотных диапазона – 2,4 ГГц и 5 ГГц. Скорость передачи –
до 54 Мбит/с. Распространен вариант со скоростью 11 Мбит/с.
Технология Wi-Fi (Wireless Fidelity) позволяет организовать связь между
компьютерами числом от 2 до 15 с помощью концентратора (называемого
точкой доступа, Access Point, AP), или нескольких концентраторов, если
компьютеров от 10 до 50. Так же есть возможность связать две локальные сети
на расстоянии до 25 километров с помощью мощных беспроводных мостов.
Инфракрасный канал использует для связи инфракрасное излучение.
Главное его преимущество – нечувствительность к электромагнитным
помехам.
Инфракрасная
связь
плохо
работает
в
условиях
сильной
запыленности воздуха.
Скорости передачи информации по инфракрасному каналу обычно не
превышают 5—10 Мбит/с, но при использовании инфракрасных лазеров может
быть достигнута скорость более 100 Мбит/с. Секретность передаваемой
информации не обеспечивается, также требуются сравнительно дорогие
приемники и передатчики. Поэтому инфракрасные каналы в локальных сетях
применяют довольно редко. Чаще используются для связи компьютеров с
периферией (интерфейс IrDA).
Инфракрасные каналы делятся на две группы:
-Каналы прямой видимости - связь осуществляется на лучах, идущих
непосредственно от передатчика к приемнику. Связь возможна только при
отсутствии препятствий между компьютерами сети. Протяженность канала
может достигать нескольких километров.
-Каналы на рассеянном излучении - работают на сигналах, отраженных от
стен, потолка, пола и других препятствий. Т.е. препятствия - не помеха, но
связь может осуществляться только в пределах одного помещения.
34
4 ИНТЕРФЕЙСЫ СИСТЕМ ВВОДА-ВЫВОДА.
4.1
Понятие интерфейса,
Реализация интерфейсов
назначение,
Создание современных средств
характеристики.
вычислительной техники связано с
задачей объединения в единый комплекс различных блоков ЭВМ, устройств
хранения и отображения информации, измерительных приборов, устройств
для
связи
с
объектом
(УСО),
аппаратуры
передачи
непосредственно ЭВМ. Эта задача возлагается
данных
и
на унифицированные
системы сопряжения – интерфейсы. Термин «интерфейс» обычно трактуется
как синоним слова «сопряжения»
схемотехнических
средств,
и понимается как совокупность
обеспечивающих
непосредственное
взаимодействие составных элементов устройства, системы. Нередко это
определение
используется
для
обозначения
составных
компонентов
интерфейса. В одних случаях под интерфейсом понимают программные
средства,
обеспечивающие
взаимодействие
программ
операционной
системы, в других – устройства сопряжения, обеспечивающие взаимосвязь
между составными функциональными блоками или устройствами системы.
Для акцентирования внимания на комплексном характере интерфейса
используются
термины
«интерфейсная
система»,
«программный
интерфейс», «физический интерфейс», «аппаратный интерфейс», и т.п.
Под
стандартным
интерфейсом
понимается
совокупность
унифицированных аппаратных, программных и конструктивных средств,
необходимых для реализации взаимодействия различных функциональных
элементов в автоматических системах сбора и обработки информации при
условиях, предписанных стандартом и направленных на обеспечение
информационной,
электрической
и
конструктивной
совместимости
указанных элементов.
35
Структурная схема интерфейса показана на рис 13.
Рис.13. - Структурная схема интерфейса: ФБ – функциональный блок, К –
контроллер, УБ – управляющий блок, ИБ – интерфейсный блок
Средства интерфейса обеспечивают совместную работу независимых
разнородных функциональных блоков системы. Условно ИБ можно разделить
на две части: часть, обращенная к ФБ и учитывающая его специфику, и
часть, поддерживающая взаимодействие с другими устройствами в рамках
требований интерфейса.
Проектирование интерфейсов выполняется на основе четырех основных
взаимосвязанных принципов: группового, агрегатирования, унификации,
взаимозаменяемости.
Принцип группового проектирования заключается в создании ряда
(семейства)
функционального
и
конструктивно
подобранных
устройств(модулей, систем) определенного назначения, соответствующих
разнообразным условиям их использования. Основная задача группового
проектирования
совместимости
–
достижение
ЭВМ,
максимальной
вычислительных
универсальности
комплексов
(ВК)
и
внутри
проектируемого ряда. Примером эффективного использования принципа
36
группового проецирования являются разработки IBM РС – техники, Macintosh
Apple .
Принцип
агрегатирования
(модульного
построения)
состоит
в
рациональном разделении системы, устройства на совокупность более простых
функционально и конструктивно законченных блоков (модулей) с целью
совершенствования их технических характеристик, а также обеспечения
высокопроизводительных способов производства и обслуживания.
Принцип унификации
заключается в минимизации номенклатуры
составных узлов, блоков устройства, модулей связей между ними при условии
рациональной компоновки и эффективного функционирования устройства или
системы.
Интерфейс
можно
рассматривать
как
практический
пример
унификации связей и устройств составных элементов ЭВМ и систем.
Принцип взаимозаменяемости основывается на способности
модуля
выполнять в устройстве различные установочные функции без дополнительной
конструкторской
процесса
доработки.
унификации.
Взаимозаменяемость
Эта
характеристика
является
следствием
определяет
степень
универсальности устройства.
Эффективное использование рассмотренных принципов проектирования
при разработке и внедрении интерфейсов и устройств сопряжения позволяет:
организовать крупносерийное производство; повысить качество; сократить
сроки изготовления; снизить стоимость производства, отладки и эксплуатации;
осуществить преемственность технических решений и удлинить сроки
морального старения средств ВТ.
Основным
назначением
интерфейса
является
унификация
внутрисистемных и межсистемных связей и устройств сопряжения с целью
эффективной
реализации
прогрессивных
методов
проектирования
функциональных элементов вычислительных систем.
37
Качество стандарта на интерфейс может быть оценено соотношением,
устанавливаемым между ограничениями на реализацию интерфейса и
устройств сопряжения и возможностями варьирования тех или иных
технических характеристик интерфейса с целью наиболее эффективного
приспособления его к конкретной системе. Слишком жесткая регламентация
условий совместимости ограничивает область применения интерфейса или же
вызывает неоптимальное его использование. Однако при этом упрощается
задача проектирования устройств сопряжения. В противоположном случае
увеличивается вероятность несовместимости интерфейсного оборудования,
разрабатываемого различными производителями.
Жесткая зависимость интерфейсов от архитектурных особенностей ЭВМ
является одной из причин, препятствующих унификации многочисленных
модификаций
технологии
интерфейсов.
тенденция
Однако
сохранения
на
определенном
интерфейса
снижает
этапе
развития
эффективность
использования средств ВТ и возможность внедрения новых принципов
построения ЭВМ и систем на их основе.
Опыт показывает, что унификация и стандартизация наиболее широко
применяемых интерфейсов дают значительный экономический эффект. Этот
эффект
достигается
в
сфере
производства (сокращение
номенклатуры
изделий, увеличение объемов партий изделий и пр.), при проектировании и
эксплуатации систем.
Современные темпы развития микроэлектронной технологии, а также
тенденции и практика построения микропроцессорных систем в настоящее
время определили следующие направления развития интерфейсов:
1.
Дальнейшее
повышение
уровня
унификации
интерфейсного
оборудования и стандартизации условий совместимости существующих
наиболее распространенных интерфейсов на основе обобщения опыта их
широкого использования. Это совершенствование направлено на создание
38
новых стандартных интерфейсов или на повышение уровня стандартизации
существующих.
2.
Модернизация
и
расширение
функциональных
возможностей
существующих интерфейсов без нарушения условий совместимости благодаря
новейшим достижениям в микроэлектронной технологии и технологии
разработки средств передачи информации. Основная цель этого направления—
удлинение
сроков
морального
старения
стандартных
интерфейсов
и
расширение области их применения.
3. Создание принципиально новых интерфейсов и разработка требований
на их унификацию и стандартизацию. Эта тенденция обусловлена в первую
очередь разработкой систем с параллельной распределенной обработкой
информации
на
основе
качественно
новых
принципов
организации
вычислительного процесса, а также интегрированных распределенных систем.
Дадим основные определения понятия интерфейсы.
Стандартный интерфейс – совокупность унифицированных аппаратных,
программных и конструктивных средств, необходимых для реализации
взаимодействия различных функциональных элементов в автоматических
системах сбора и обработки информации при условиях, предписанных
стандартом и направленных на обеспечение информационной, электрической и
конструктивной совместимости указанных элементов
Шина
интерфейса –
совокупность
линий,
сгруппированных
по
функциональному назначению
Информационная
совместимость –
согласованность
взаимодействия
функциональных элементов системы в соответствии с совокупностью
логических условий
Логические условия:
- структура и состав унифицированного набора соединительных линий
39
- набор процедур по реализации взаимодействия и последовательность их
выполнения
для
различных
режимов
функционирования
(протокол
интерфейса)
- способ кодирования и форматы данных, команд, адресной информации и
информации состояний
- временные соотношения между управляющими сигналами, ограничения на
их форму и взаимодействие
Электрическая
совместимость –
согласованность
статических
и
динамических параметров электрических сигналов в системе соединительных
линий интерфейса с учетом ограничений на пространственное размещение
частей интерфейса и техническую реализацию приемопередающих блоков
интерфейса
Условия электрической совместимости:
- тип приемопередающих элементов, соотношения между логическими и
электрическими состояниями сигналов, пределы их изменения
- коэффициенты нагрузочной способности приемопередающих элементов и
значения допустимой емкостной и резистивной нагрузки линии в устройстве
- схема согласования линии
- допустимая длина линии и порядок подключения линий к соединительным
элементам (разъемам)
- требования к источникам и цепям электрического питания
- требования по помехоустойчивости и заземлению
Конструктивная
совместимость –
согласованность
конструктивных
элементов интерфейса, предназначенных для обеспечения механического
контакта электрических соединений и механической замены схемных
элементов, блоков и устройств
Условия конструктивной совместимости:
- типы соединительных элементов (разъем, штекер, распределение линий
внутри соединительного элемента)
40
- конструкция платы, каркаса, стойки
- конструкция кабельного соединения
Физическая реализация интерфейса – состав и характеристики линий
передачи, конструкция средств их подключения, вид и характеристики
сигналов
Логическая
реализация
интерфейса –
протоколы
взаимодействия
(алгоритмы формирования сигналов обмена)
Характеристики интерфейсов:
- вид связи: дуплексная (сообщения могут одновременно передаваться в
двух направлениях – два канала связи), полудуплексная (сообщения могут
передаваться в двух направлениях, но одновременно – только в одном),
симплексная (сообщения могут передаваться только в одном направлении)
передачи
- пропускная способность – количество информации, передаваемое через
интерфейс в единицу времени
- максимальное допустимое расстояние между устройствами или суммарная
длина линий между всеми устройствами интерфейса
- задержки при
организации
передачи,
вызванные
необходимостью
выполнения подготовительных и завершающих действий по установлению
связи между устройствами.
Организация интерфейсов определяется способами передачи информации
(параллельная или последовательная, асинхронная или синхронная),
соединения устройств и использования линий. Цифровые сообщения могут
передаваться в последовательной и параллельно-последовательной форме
Последовательный интерфейс: передача данных осуществляется по одной
линии (общее число линий может быть и больше, когда по дополнительным
линиям передаются сигналы синхронизации и управления). Применяются для
подключения
низкоскоростных
ПУ,
расположенных
на
значительных
расстояниях от ЭВМ
41
Параллельный
интерфейс:
передача
сообщения
выполняется
последовательными блоками, содержащими n бит (n – ширина интерфейса,
обычно кратна байту – 8, 16). Каждый блок передается одновременно
по n линиям
Для исключения возможности приема неправильной кодовой комбинации в
параллельных интерфейсах вводят дополнительную линию стробирования.
Сигнал, передаваемый по ней, соответствует завершению установления
сигналов на входах приемника. Необходимо передать сигнал строба с
задержкой относительно момента выдачи информационных сигналов на линии
Группы линий интерфейса: информационный канал и магистраль управления
информационным каналом
По информационному каналу передаются коды данных, адресов, команд,
состояний
Магистраль управления информационным каналом:
- шина передачи управления (арбитраж и захват информационного канала)
- шина управления обменом (синхронизация обмена)
- шина линии прерываний (идентификация устройства, запрашивающего сеанс
обмена информацией)
- шина специальных управляющих сигналов линии (контроль источника
питания, контроль передаваемой информации, сигнал общего сброса)
Основные функции интерфейса:
- арбитраж информационного канала
- синхронизация обмена информацией
- координация взаимодействия
- обмен и преобразование информации выполняются информационным
каналом интерфейса (преобразование параллельного кода в последовательный
42
код и наоборот, перекодирование информации, дешифрация команд и адресов,
логические действия над содержимым регистра состояний)
- буферное хранение информации (не обязательно)
Координация взаимодействия:
- настройка на взаимодействие: опрос и анализ состояния вызываемого
устройства (может ли участвовать в обмене); чаще всего реализуется
программно
- контроль взаимодействия (разрешение тупиковых ситуаций при асинхронном
обмене, повышение достоверности передаваемых данных)
- передача функции управления (в интерфейсах с децентрализованной
структурой управления)
4.2 Классификация интерфейсов
В настоящее время не существует достаточно полной объективной
классификации интерфейсов. Имеющиеся классификации основываются, как
правило, на одном классификационном признаке или же строятся для одного
класса интерфейсов. Определенным обобщением этих классификаций является
стандарт на классификационные признаки интерфейсов, включающий четыре
признака классификации:
-
по
способу
соединения
компонентов
системы
(магистральный,
радиальный, цепочечный, смешанный);
При магистральном способе имеются коллективные шины, к которым
подключены все устройства системы. Характерно,
что сигналы шины
доступны всем устройствам, но в каждый момент времени только два
устройства
могут обмениваться
данными (1:1). Возможны
также
широковещательные операции (1:М).
В системе с радиальной структурой имеется центральное устройство
(контроллер
или
концентратор),
связанный
с каждым
из
абонентов
индивидуальной группой однонаправленных линий.
43
При цепочечной структуре каждое устройство связано не более чем с
двумя другими.
Частным
случаем
цепочечной
структуры
является
кольцевая.
- по способу передачи информации (параллельный, последовательный,
параллельно-последовательный);
- по принципу обмена информацией (асинхронный, синхронный);
- по режиму обмена информацией (симплексный; полудуплексный;
дуплексный и мультиплексный режим обмена).
Для случая связи двух абонентов в симплексном режиме лишь один из двух
абонентов
может
инициировать
в
любой
момент
времени
передачу
информации по интерфейсу
Для случая связи двух абонентов в полудуплексном режиме любой абонент
может начать передачу информации другому, если линия связи интерфейса при
этом оказывается свободной.
Для случая связи двух абонентов в дуплексном режиме каждый абонент
может начать передачу информации другому в произвольный момент времени.
В случае связи нескольких абонентов в мультиплексном режиме в каждый
момент времени связь может быть осуществлена между парой абонентов в
любом, но единственном направлении от одного из абонентов к другому.
Указанные признаки позволяют характеризовать только определенные
аспекты
организации
систематизация
интерфейсов.
интерфейсов
Более
могут
быть
полная
характеристика
выполнены
при
и
условии
классификации по нескольким совокупностям признаков:
области распространения (функциональному назначению);
логической и функциональной организации;
физической реализации.
В соответствии с первой совокупностью признаков интерфейсы можно
разделить на следующие основные классы:
машинные (или системные);
44
периферийного оборудования;
мультимикропроцессорных систем;
распределенных
ВС
(вычислительных
локальных
сетей,
распределенных систем управления).
Машинные интерфейсы предназначены для организации связей между
составными компонентами ЭВМ, ВК, ВС, т. е. непосредственно для их
построения и связи с внешней средой.
Интерфейсы периферийного оборудования выполняют функции сопряжения
процессоров,
контроллеров
с
УВВ,
измерительными
приборами,
исполнительными механизмами, аппаратурой передачи данных (АПД) и
внешними запоминающими устройствами (ВЗУ). Интерфейсы периферийного
оборудования представляют самый большой класс систем сопряжения, что
объясняется
широкой
номенклатурой
и
разнообразием
периферийного
оборудования. По своему функциональному назначению эти интерфейсы могут
быть
разделены
(обеспечивающие
на
группы
схему
интерфейсов
сопряжения
радиальной
«точка-точка»)
и
структуры
магистральной
структуры (обеспечивающие схему «многоточечного» подключения).
Системы
сопряжения
первой
группы
составляют
в
основном
так
называемые малые интерфейсы, применяемые для сопряжения исполнительных
механизмов ввода-вывода с контроллерами. К этим интерфейсам относятся:
системы сопряжения с параллельной передачей информации, предназначенные
для
подключения
стандартной
периферии,
системы
сопряжения
для
подключения устройств, размещенных на большом удалении друг от друга.
Интерфейсы второй группы используются как самостоятельно, так и в
качестве системотехнического дополнения, расширяющего функциональные
возможности ЭВМ на уровне связи с объектом управления. К ним относятся
магистральные интерфейсы программно-модульных систем типов IEC 625-1.
Эти интерфейсы обеспечивают сопряжение программируемых контроллеров и
ЭВМ
с
широким
спектром
цифровых
измерительных
приборов,
45
преобразователей информации, генераторов, датчиков, пультов оператора. В
вычислительных системах к такого рода интерфейсам относятся SCSI,
USB.
Интерфейсы мультимикропроцессорных систем представляют собой в
основном
магистральные
объединение
в
единый
системы
сопряжения,
комплекс
нескольких
оперативных запоминающих
ограниченно
размещенных
мультимикропроцессорных
устройств
в
(ОЗУ),
пространстве.
систем
входят
в
В
ориентированные
процессоров,
модулей
контроллеров
группу
основном
на
ВЗУ,
интерфейсов
внутриблочные,
процессорно -независимые системы сопряжения. Характерным их отличием от
обычных
магистральных интерфейсов
является техническая реализация
функций селекции и координации, что позволяет подключать к ним один или
несколько процессоров как обычные УВВ. Этот класс интерфейсов отличают
высокая пропускная способность и минимальное время доступа процессора к
общей ОЗУ.
Данный класс систем сопряжения может быть разделен на две крупные
группы в соответствии со структурой шин адреса и данных: с раздельными и
мультиплексными шинами. Как правило, эти интерфейсы представляют собой
внутриблочную систему сопряжения магистральной структуры с высокой
пропускной способностью.
Интерфейсы распределенных ВС предназначены для интеграции средств
обработки информации, размещенных на значительном расстоянии
и
ориентированы на использование в системах различного функционального
назначения. Обычно это системы сопряжения с бит - последовательной
передачей информации магистральной или кольцевой структуры. Этот класс
интерфейсов в зависимости от назначения разделяется на группы интерфейсов:
локальных сетей (с длиной магистрали от десятков метров до
нескольких километров);
46
распределенных систем управления;
территориально и географически распределенных сетей ЭВМ (с
длиной линии более десяти километров).
По конструктивному исполнению интерфейс могут быть разделены на
четыре категории:
межблочные,
обеспечивающие
взаимодействие
компонентов
на
уровне прибора, автономного устройства, блока, стойки, шкафа;
внутриблочные, обеспечивающие взаимодействие на уровне плат,
субблоков;
внутриплатные, обеспечивающие взаимосвязь между интегральными
схемами (СИС, БИС, СБИС) на печатной плате;
внутрикорпусные, обеспечивающие взаимодействие компонентов
внутри СБИС.
Межблочное
конструктивных
сопряжение
средств:
реализуется
коаксиального
на
и
уровне
следующих
оптоволоконного
кабеля;
многожильного плоского кабеля (шлейфа); многожильного кабеля на основе
витой пары проводов. Внутриблочное сопряжение печатных плат, субблоков
выполняется печатным способом или накруткой витой парой проводов внутри
блока, стойки, шкафа. Ряд интерфейсов может быть реализован комбинацией
внутри-блочного и межблочного исполнений. Внутриплатное сопряжение
реализуется
печатным
способом,
внутрикорпусное
—
методами
микроэлектронной технологии.
4.3 Структурная организация интерфейсов
Составными
физическими
элементами
связей
интерфейса
электрические цепи, называемые линиями интерфейса. Различают
являются
одно-
и
двунаправленные линии. Если на линии работает только один передатчик,
линия считается однонаправленной, в этом случае используется традиционное
схемотехническое решение приемопередающих узлов – один источник сигнала
47
подключен
к
нескольким
приемникам.
В случае двунаправленных
линий
количество передающих устройств на линии больше одного, и это требует
применения
каскады
в передающих
устройствах
с высокоимпедансным
специальных решений – выходные
состоянием (т. н. «третье» состояние),
с
открытым коллектором, с открытым стоком. При этом средства управления
интерфейсом
должны
«регулировать»
активность
передающих
устройств
таким образом, чтобы в каждый момент времени передачу вело только одно
устройство.
Часть линий, сгруппированных по функциональному назначению, называется
шиной, а вся совокупность линий—магистралью, В системе шин интерфейсов
условно можно выделить две магистрали: информационного канала и управления
информационным каналом.
По информационной магистрали передаются коды данных, адресов, команд и
состояний
устройств.
Аналогичные
наименования
присваиваются
соответствующим шинам интерфейса.
Коды данных представляют информацию о процессах, протекающих в ВС.
Обычно в машинных интерфейсах используется двоичное кодирование в формате
машинного кода. Линии ШД обычно нумеруются DATXX, где ХХ – двоичный
вес линии. Т.е. по линии DAT00 передается младший разряд машинного слова,
по линии DAT01 – разряд с весом 2**1 и т.д.
Коды адресов предназначены для выборки в магистрали устройств, узлов
устройства, ячеек памяти. Обычно для адресации используется позиционный
двоичный код (двоичный
номер объекта), однако нередко применяется и
кодирование, при котором каждому устройству выделяется отдельная линия
адреса.
Коды команд используются для управления функционированием устройств и
обеспечения
сопряжения
между
ними.
В
стандартах
на
интерфейс
регламентируется минимально необходимый набор команд, который может быть
расширен пользователем за счет резервных полей в кодах. По функциональному
48
назначению различают адресные команды управления обменом информации
между устройствами, команды изменения состояния и режимов работы. К
наиболее распространенным командам относятся: «Чтение», «Запись», «Конец
передачи», «Запуск».
Коды состояния представляют собой сообщения, описывающие состояния
устройств сопряжения. Коды формируются в ответ на действия команд или
являются отображением состояний функционирования устройства, таких как
«Занятость устройства», «Наличие ошибки», «Готовность устройства» к приему
или передаче информации и т. п.
В большинстве случаев коды данных, адресов, команд и состояний
передаются
по
шинам
интерфейса
с
разделением
времени
за
счет
мультиплексирования шин. Это достигается введением дополнительных линий
для
обозначения
типа
передаваемой
информации,
называемых
линиями
идентификации. Их применение позволяет существенно сократить общее число
линий информационной магистрали интерфейса, однако при этом происходит
снижение быстродействия передачи информации.
Магистраль
управления
информационным
каналом
по
своему
функциональному назначению делится на ряд шин:
управления обменом,
передачи управления,
прерывания,
специальных управляющих сигналов.
Шина управления обменом включает в себя линии синхронизации передачи
информации. В зависимости от принятого принципа обмена (асинхронного,
синхронного) число линий может изменяться от одной до трех. Асинхронная
передача происходит при условии подтверждения приемником готовности к
приему и завершается подтверждением о приеме данных. При синхронной
передаче темп выдачи и приема данных задается регулярной последовательностью
49
сигналов. Линии шины управления обменом в случае двунаправленной
информационной магистрали выполняются, как правило, двунаправленными.
Шина передачи управления выполняет операции приоритетного занятия
магистрали информационного канала. Наличие этой шины определяется тем, что
взаимодействие в большинстве интерфейсов выполняется по принципу «ведущийведомый» («задатчик-исполнитель»), при котором «ведущее» устройство может
брать управление шиной на себя в определенные моменты времени. При наличии
в системе нескольких устройств, способных выполнять функции «ведущего»,
возникает проблема приоритетного распределения ресурсов шины (арбитража).
Состав и конфигурация линий этой шины зависят от структуры управления
интерфейсом. Различают децентрализованную и централизованную структуры. В
интерфейсах,
предназначенных
для
объединения
только
двух
устройств
(соединение типа «точка-точка»), шина передачи управления отсутствует.
Шина прерывания применяется в основном в машинных интерфейсах ЭВМ и
программно-модульных систем. Основная ее функция — идентификация
устройства, запрашивающего сеанс обмена информацией. Идентификация состоит
в
определении
контроллером
(процессором)
исходной
информации
о
запрашиваемом устройстве. В качестве информации об устройстве используется
адрес источника прерывания либо адрес программы обслуживания прерывания
(вектор прерывания).
Шина специальных управляющих сигналов включает в себя линии,
предназначенные для обеспечения работоспособности и повышения надежности
устройств интерфейса. К этим линиям относятся: линии питания, контроля
источника питания, тактирующих импульсов, защиты памяти, общего сброса,
контроля информации и т. п.
В соответствии с существующим стандартом структуры связей интерфейсов
подразделяются на следующие классы: магистральную; радиальную; цепочечную
и смешанную (комбинированную). Тем не менее такое разделение не позволяет
дать детального представления о пространственном размещении функциональных
50
устройств и устройств сопряжения, а также о возможностях взаимосвязи этих
устройств, т. е. их связности. Связность линии определяет возможность
двустороннего или одностороннего направления передачи сигналов, т. е. передачи
в прямом и обратном направлениях. Для однонаправленных линий связи
возрастает пропускная способность информационной магистрали, упрощаются
приемопередающие элементы и улучшается согласование линий. Однако
применение однонаправленных линий приводит к увеличению общего числа
линий.
4.4 Селекция информационного канала
Селекция,
или
арбитраж,
информационного
канала
обеспечивает
однозначность выполнения процессов взаимодействия сопрягаемых элементов
системы
посредством
приоритетного
разрешения
внутриорганизационных
конфликтов. Наличие конфликтов при доступе к информационному каналу
является следствием взаимодействия параллельных процессов, протекающих в
системе
обработки
информации.
При
взаимодействии
устройств,
функционирующих параллельно во времени с общим информационным каналом,
возможны конфликты двух уровней: при доступе устройства к информационному
каналу интерфейса, при доступе одного устройства к другому. Первый уровень
определяется занятостью информационного канала, и конфликт разрешается
функцией селекции, второй—занятостью устройства, к которому происходит
обращение, и конфликт разрешается при координации взаимодействия.
Управление операциями селекции может выполняться как централизованно,
так и децентрализованно. Основным признаком централизованной структуры
управления селекцией является в большинстве случаев наличие разомкнутых
линий
шин
передачи
функционального
узла
децентрализованной
управления
и
управления
операциями
структуре
прерывания,
а
также
селекции—
соответствующие
линии
отдельного
арбитра.
В
являются
двунаправленными или же замкнутыми однонаправленными, а схема арбитра
симметрично распределена по устройствам сопряжения.
51
Рассмотрим
способы
централизованной
селекции
информационной
магистрали. На рис. 14а показан вариант пространственной селекции на основе
последовательного адресного сканирования источников запроса. Выбор источника
запроса начинается по общему сигналу запроса и выполняется последовательной
кодовой адресацией всех подключаемых устройств в соответствии с принятой
дисциплиной
обслуживания.
При
обнаружении
источника
запроса
устанавливается сигнал «Занято» и дальнейшая выдача адресов прекращается.
Рис. 14. - Схемы селекции магистрали централизованной структуры: К —
контроллер; ИБ — интерфейсный блок
52
Основным достоинством этого способа селекции является гибкость в
реализации
дисциплин
обслуживания.
Практически
при
использовании
программируемой генерации адресов на основе данного способа можно
реализовать любую дисциплину обслуживания. Основным недостатком является
низкое быстродействие.
Схема последовательной (цепочечной) селекции, представленная на рис. 14б,
широко распространена в машинных интерфейсах как наиболее простая и
достаточно быстродействующая. Поиск источника запроса начинается по сигналу
«Запрос». Идентификация наиболее приоритетного устройства выполняется
сигналом «Подтверждение», который последовательно проходит через все
устройства. Приоритетным в данном случае будет устройство, наиболее близко
расположенное к контроллеру. При поступлении сигнала «Подтверждение» в
устройство (источник запроса) дальнейшее его прохождение блокируется и
устройством
выставляется
последовательного
сигнал
соединения
«Занято».
интерфейсных
Основными
блоков
преимуществами
является
простота
реализации и высокое быстродействие по сравнению с адресным сканированием.
Основным недостатком схем селекции на основе последовательного соединения
является низкая надежность, в особенности при увеличении длины интерфейсных
связей. Поэтому последовательное соединение находит основное применение во
внутриблочных интерфейсах.
Аналогично цепочечной схеме функционирует и схема селекции по
выделенным линиям (рис. 14в). Отличие ее от предыдущей заключается в том,
что общие линии «Запрос» и «Подтверждение» заменяются системой радиальных
линий. Максимальное время занятия информационной магистрали для этого
варианта будет меньше, чем для цепочечной структуры, так как сигналы по шинам
запроса и подтверждения могут передаваться параллельно.
Данный способ характеризуется также гибкостью установления дисциплины
обслуживания, поскольку контроллер с помощью масок может установить
произвольный приоритет и порядок опроса. Однако это достигается за счет
53
существенного увеличения числа линий и усложнения схемотехнического
оборудования.
Для
данного
метода
характерно
ограничение
по числу
подключаемых устройств (низкая наращиваемость). Подобный способ селекции
используется в IBM РC – подобной технике.
Основные
варианты
реализации
схем
селекции
децентрализованной
структуры представлены на рис. 15.
Рис. 15. - Схема селекции магистрали децентрализованной структуры.
Характерным признаком децентрализованной
селекции является наличие
замкнутых линий запроса и подтверждения. На рис. 15а показан вариант
децентрализованной цепочечной структуры, которая может быть получена из
централизованной исключением линии «Занято» и замыканием общей линии
«Запрос» с линией «Подтверждение». Необходимым условием установления
запроса
любым
устройством
является
отсутствие
входного
сигнала
подтверждения. При выдаче запроса этот сигнал «дизъюнктивно» формируется на
54
линии и трансформируется в сигнал «Подтверждение», который будет проходить
до устройства,
выставившего запрос и находящегося наиболее близко по
отношению к точке замыкания.
На рис. 15б показан вариант кольцевой децентрализованной схемы селекции.
В варианте используется одна линия, определяющая состояние занятости
информационного канала по циркуляции в линии маркерного импульса или серии
импульсов. Устройство, запрашивающее шину, не пропускает маркер к
следующему устройству, и, таким образом, циркуляция импульсов прекращается.
Способ широко распространен в интерфейсах локальных сетей. Основным
недостатком способа является низкая помехоустойчивость.
Одним из наиболее перспективных способов селекции для магистральных
систем сопряжения является способ параллельного адресного сравнения или же
децентрализованного кодового управления (ДКУ), структурная схема которого
представлена на рис. 15в.
Сущность алгоритма ДКУ заключается в параллельном выделении
приоритетного
кода запроса посредством поразрядного
сравнения
кодов
приоритета в асинхронном режиме одновременно во всех устройствах интерфейса,
выставивших запросы. Такое решение использовано, например, в интерфейсных
системах Multibus II и Fastbus. Адреса в интерфейсах могут быть заданы
позиционным двоичным или унитарным кодом и передаваться по адресной или
информационной шине.
5 РЕАЛИЗАЦИЯ АППАРАТНЫХ ИНТЕРФЕЙСОВ: ПРОБЛЕМЫ И
ТЕХНИЧЕСКИЕ РЕШЕНИЯ
5.1 Электромагнитные помехи
В качестве ЭМП может фигурировать практически любое электромагнитное
явление в широком диапазоне частот, способное негативно влиять на работу
55
аппаратуры. В зависимости от источника ЭМП можно разделить на
естественные и искусственные. Наиболее распространенной естественной ЭМП
является электромагнитный импульс при ударе молнии. Искусственные помехи
можно разделить на создаваемые функциональными и нефункциональными
источниками. Источник помехи является функциональным, если для него самого
создаваемая ЭМП является полезным сигналом.
В зависимости от среды распространения ЭМП могут разделяться на
индуктивные
и
кондуктивные.
Индуктивными
называются
ЭМП,
распространяющиеся в виде электромагнитных полей в непроводящих средах.
Кондуктивные ЭМП представляют собой токи, текущие по проводящим
конструкциям и земле. Деление помех на индуктивные и кондуктивные является,
условным. В реальности протекает единый электромагнитный процесс,
затрагивающий проводящую и непроводящую среду. В ходе распространения
многие помехи могут превращаться из индуктивных в кондуктивные и наоборот.
Так, переменное электромагнитное поле способно наводить токи в кабелях,
которые далее распространяются как классические кондуктивные помехи. С
другой
стороны, токи
в
кабелях
и
цепях
заземления
сами
создают
электромагнитные поля, т.е., индуктивные помехи. Деление помех на
индуктивные и кондуктивные можно считать относительно строгим лишь в
низкочастотной (до десятков кГц) области, когда емкостные и индуктивные
связи обычно малы.
Кондуктивные помехи в цепях, имеющих более одного проводника, принято
также делить на помехи "провод - земля" (синонимы - несимметричные, общего
вида, Common Mode) и "провод-провод" (симметричные, дифференциального
вида, Differential Mode). В первом случае ("провод-земля") напряжение помехи
приложено, как следует из названия, между каждым из проводников цепи и
землей (рис. 16 а). Во втором - между различными проводниками одной цепи
(рис. 16 б). Обычно самыми опасными для аппаратуры являются помехи
56
"провод-провод", поскольку они оказываются приложенными так же, как и
полезный сигнал.
Рис. 16. Схема приложения помехи "провод-земля" (а) и "провод-провод" (б).
Реальные помехи обычно представляют собой комбинацию помех "проводпровод" и "провод-земля". Нужно учитывать, что несимметрия внешних цепей
передачи сигналов и входных цепей аппаратуры может вызывать преобразование
помехи "провод-земля" в помеху "провод-провод". На рис. 17 наглядно показан
упрощенный процесс преобразования помехи: несимметрия внешних цепей
(Zl1не равно Zl2) и входных цепей аппаратуры-приемника (Zi1 не равно Zi2)
приводит к появлению помехи "провод-провод" величиной Ud = (Zi1/ Zl1 Zi2/Zl2)Uc. В данном примере упрощение заключается в том, что внутреннее
сопротивление
приемника
в
режиме
"провод-провод"
принято
равным
бесконечности (т.е., в качестве измерителя полезного сигнала включен
идеальный вольтметр).
57
Рис. 17. Преобразование помехи "провод-земля" в помеху "провод-провод".
5.2 Характеристики линий связи
Типы характеристик и способы их определения
К основным характеристикам линий связи относятся:
1. амплитудно-частотная характеристика;
2. полоса пропускания;
3. затухание;
4. помехоустойчивость;
5. перекрестные наводки на ближнем конце линии;
6. пропускная способность;
7. достоверность передачи данных;
8. удельная стоимость.
В первую очередь разработчика вычислительной сети интересуют
пропускная способность и достоверность передачи данных, поскольку эти
характеристики
создаваемой
прямо
сети.
влияют
Пропускная
на
производительность
способность
и
и
надежность
достоверность
-
это
характеристики как линии связи, так и способа передачи данных. Поэтому если
способ передачи (протокол) уже определен, то известны и эти характеристики.
Например, пропускная способность цифровой линии всегда известна, так как
на ней определен протокол физического уровня, который задает битовую
скорость передачи данных - 64 Кбит/с, 2 Мбит/с и т. п.
Однако нельзя говорить о пропускной способности линии связи, до того
как для нее определен протокол физического уровня. Именно в таких случаях,
58
когда только предстоит определить, какой из множества существующих
протоколов можно использовать на данной линии, очень важными являются
остальные характеристики линии, такие как полоса пропускания, перекрестные
наводки, помехоустойчивость и другие характеристики.
Для определения характеристик линии связи часто используют анализ ее
реакций на некоторые эталонные воздействия. Такой подход позволяет
достаточно просто и однотипно определять характеристики линий связи любой
природы, не прибегая к сложным теоретическим исследованиям. Чаще всего в
качестве эталонных сигналов для исследования реакций линий связи
используются синусоидальные сигналы различных частот. Это связано с тем,
что сигналы этого типа часто встречаются в технике и с их помощью можно
представить любую функцию времени - как непрерывный процесс колебаний
звука, так и прямоугольные импульсы, генерируемые компьютером.
Спектральный анализ сигналов на линиях связи
Из теории гармонического анализа известно, что любой периодический
процесс можно представить в виде суммы синусоидальных колебаний
различных частот и различных амплитуд (рис. 18). Каждая составляющая
синусоида называется также гармоникой, а набор всех гармоник называют
спектральным разложением исходного сигнала. Непериодические сигналы
можно представить в виде интеграла синусоидальных сигналов с непрерывным
спектром частот. Например, спектральное разложение идеального импульса
(единичной мощности и нулевой длительности) имеет составляющие всего
спектра частот, от - ∞ до + ∞ (рис. 19).
59
Рис.18. Представление периодического сигнала суммой синусоид
Рис.19.Спектральное разложение идеального импульса
Техника нахождения спектра любого исходного сигнала хорошо известна.
Для некоторых сигналов, которые хорошо описываются аналитически
(например, для последовательности прямоугольных импульсов одинаковой
длительности и амплитуды), спектр легко вычисляется на основании формул
Фурье. Для сигналов произвольной формы, встречающихся на практике, спектр
можно найти с помощью специальных приборов - спектральных анализаторов,
которые измеряют спектр реального сигнала и отображают амплитуды
составляющих гармоник на экране или распечатывают их на принтере.
Искажение передающим каналом синусоиды какой-либо частоты приводит в
конечном счете к искажению передаваемого сигнала любой формы, особенно
если синусоиды различных частот искажаются неодинаково. Если это
аналоговый сигнал, передающий речь, то изменяется тембр голоса за счет
искажения обертонов - боковых частот. При передаче импульсных сигналов,
характерных для компьютерных сетей, искажаются низкочастотные и
высокочастотные гармоники, в результате фронты импульсов теряют свою
60
прямоугольную форму (рис. 20). Вследствие этого на приемном конце линии
сигналы могут плохо распознаваться.
Рис.20.Искажение импульсов в линии связи
Линия связи искажает передаваемые сигналы из-за того, что ее физические
параметры отличаются от идеальных. Так, например, медные провода всегда
представляют собой некоторую распределенную по длине комбинацию
активного сопротивления, емкостной и индуктивной нагрузки (рис. 2.6). В
результате для синусоид различных частот линия будет обладать различным
полным сопротивлением, а значит, и передаваться они будут по-разному.
Волоконно-оптический
идеальному
кабель
также
имеет
распространению
света.
Если
отклонения,
линия
мешающие
связи
включает
промежуточную аппаратуру, то она также может вносить дополнительные
искажения, так как невозможно создать устройства, которые бы одинаково
хорошо передавали весь спектр синусоид, от нуля до бесконечности.
Рис. 21. Представление линии как распределенной индуктивно-емкостной
нагрузки
Кроме
искажений
сигналов,
вносимых
внутренними
физическими
параметрами линии связи, существуют и внешние помехи, которые вносят свой
вклад в искажение формы сигналов на выходе линии. Эти помехи создают
61
различные электрические двигатели, электронные устройства, атмосферные
явления и т. д. Несмотря на защитные меры, предпринимаемые разработчиками
кабелей
и
усилительно-коммутирующей
аппаратуры,
полностью
компенсировать влияние внешних помех не удается. Поэтому сигналы на
выходе линии связи обычно имеют сложную форму (как это и показано на рис.
20), по которой иногда трудно понять, какая дискретная информация была
подана на вход линии.
Амплитудно-частотная характеристика, полоса пропускания и затухание
Степень искажения синусоидальных сигналов линиями связи оценивается
с помощью таких характеристик, как амплитудно-частотная характеристика,
полоса пропускания и затухание на определенной частоте.
Амплитудно-частотная характеристика(рис. 22) показывает, как затухает
амплитуда синусоиды на выходе линии связи по сравнению с амплитудой на ее
входе для всех возможных частот передаваемого сигнала. Вместо амплитуды в
этой характеристике часто используют также такой параметр сигнала, как его
мощность.
Рис. 22. Амплитудно-частотная характеристика
Знание амплитудно-частотной характеристики реальной линии позволяет
определить форму выходного сигнала практически для любого входного
сигнала. Для этого необходимо найти спектр входного сигнала, преобразовать
амплитуду составляющих его гармоник в соответствии с амплитудночастотной характеристикой, а затем найти форму выходного сигнала, сложив
преобразованные гармоники.
62
Несмотря
на
полноту
информации,
предоставляемой
амплитудно-
частотной характеристикой о линии связи, ее использование осложняется тем
обстоятельством, что получить ее весьма трудно. Ведь для этого нужно
провести тестирование линии эталонными синусоидами по всему диапазону
частот от нуля до некоторого максимального значения, которое может
встретиться во входных сигналах. Причем менять частоту входных синусоид
нужно с небольшим шагом, а значит, количество экспериментов должно быть
очень
большим.
Поэтому
на
практике
вместо
амплитудно-частотной
характеристики применяются другие, упрощенные характеристики - полоса
пропускания и затухание.
Полоса пропускания (bandwidth)- это непрерывный диапазон частот, для
которого отношение амплитуды выходного сигнала ко входному превышает
некоторый заранее заданный предел, обычно 0,5. То есть полоса пропускания
определяет диапазон частот синусоидального сигнала, при которых этот сигнал
передается по линии связи без значительных искажений. Знание полосы
пропускания позволяет получить с некоторой степенью приближения тот же
результат, что и знание амплитудно-частотной характеристики. Как мы увидим
ниже, ширинаполосы
пропускания
в
наибольшей
степени
влияет
на
максимально возможную скорость передачи информации по линии связи.
Именно
этот
факт
нашел
отражение
в
английском
эквиваленте
относительное
уменьшение
рассматриваемого термина (width - ширина).
Затухание
(attenuation)определяется
как
амплитуды или мощности сигнала при передаче по линии сигнала
определенной частоты. Таким образом, затухание представляет собой одну
точку
из
амплитудно-частотной
характеристики
линии.
Часто
при
эксплуатации линии заранее известна основная частота передаваемого сигнала,
то есть та частота, гармоника которой имеет наибольшую амплитуду и
мощность. Поэтому достаточно знать затухание на этой частоте, чтобы
приблизительно оценить искажения передаваемых по линии сигналов. Более
63
точные оценки возможны при знании затухания на нескольких частотах,
соответствующих нескольким основным гармоникам передаваемого сигнала.
Затухание А обычно измеряется в децибелах (дБ, decibel - dB) и
вычисляется по следующей формуле:
А = 10 log10Рвых/Рвх,
где Рвых~ мощность сигнала на выходе линии, Рвх- мощность сигнала на
входе линии.
Так как мощность выходного сигнала кабеля без промежуточных
усилителей всегда меньше, чем мощность входного сигнала, затухание кабеля
всегда является отрицательной величиной.
Например, кабель на витой паре категории 5 характеризуется затуханием
не ниже -23,6 дБ для частоты 100 МГц при длине кабеля 100 м. Частота 100
МГц выбрана потому, что кабель этой категории предназначен для
высокоскоростной передачи данных, сигналы которых имеют значимые
гармоники с частотой примерно 100 МГц. Кабель категории 3 предназначен
для низкоскоростной передачи данных, поэтому для него определяется
затухание на частоте 10 МГц (не ниже -11,5 дБ). Часто оперируют с
абсолютными значениями затухания, без указания знака.
Искажения бит происходят как из-за наличия помех на линии, так и по
причине искажений формы сигнала ограниченной полосой пропускания линии.
Поэтому для повышения достоверности передаваемых данных нужно
повышать степень помехозащищенности линии, снижать уровень перекрестных
наводок в кабеле, а также использовать более широкополосные линии связи.
5.3 Системные интерфейсы
PCI – Peripheral Component Interconnect – соединение внешних устройств –
основной стандарт универсальных локальных шин – PCI.
64
Имеет собственный адаптер, позволяющий настраиваться на работу с
любым МП, позволяет подключать до 10 устройств различной конфигурации с
возможностью автоконфигурирования, имеет арбитраж и средства управления
передачей данных.
Рис. 23. Конфигурация системы с шиной PCI
Для подключения к другим шинам применяются мосты (PCI Bridge).
Главный мост (Host Bridge) используется для подключения PCI к системной
шине (шине процессора или процессоров). Одноранговый мост (Peer-toPeer Bridge) используется для соединения двух шин PCI. Две и более шины PCI
применяются в серверных платформах; дополнительные шины PCI позволяют
увеличить количество подключаемых устройств. Совокупность мостов,
расположенных вокруг шины PCI, выполняет маршрутизацию обращений по
всем связанным шинам (Рис. 23). В общем случае считается, что устройство с
конкретным адресом может присутствовать только на одной из шин данного
компьютера, а на каком именно, «знают» запрограммированные мосты.
Синхронный 32- или 64-разрядный обмен данными.
Для уменьшения числа контактов используется мультиплексирование
(адрес и данные передаются по одним и тем же линиям).
Поддержка 5 В и 3.3 В логики; разъемы для различных напряжений
отличаются расположением ключей; существуют универсальные платы,
поддерживающие оба напряжения, но частота 66 МГц поддерживается только
3.3 В логикой.
65
Пропускная способность: 132 МБ/сек (32bit, 33МГц), 264 МБ/сек (32bit,
66МГц; 64bit, 33МГц), 528 МБ/сек (64bit, 66МГц).
Для работы шины на частоте 66 МГц необходимо, чтобы все ПУ работали
на этой частоте. Поддержка Multiply Bus Master (например, на шине могут
одновременно
работать
несколько
контроллеров
жестких
дисков).
Поддержка write-back и write-through cache.
PCI-устройства оборудованы таймером для определения максимального
промежутка времени, в течение которого устройство может занимать шину.
Поддержка метода линейных пакетов (linear burst): пакет информации
считывается/записывается в непрерывное пространство памяти, то есть адрес
автоматически увеличивается для следующего байта. При этом скорость
передачи данных увеличивается за счет уменьшения числа передаваемых
адресов.
Спецификация шины PCI определяет три типа ресурсов: два обычных
(диапазон
памяти
и
диапазон
ввода-вывода)
и
«конфигурационное
пространство». Автоконфигурирование устройств (выбор адресов, запросов
прерываний)
поддерживается
средствами
BIOS
и
ориентировано
на
технологию Plug and Play (PnP).
Стандарт
PCI
определяет
для
каждого
слота
конфигурационное
пространство размером до 256 8-битных регистров, не приписанных ни к
пространству памяти, ни к пространству ввода-вывода. Доступ к ним
осуществляется
по
специальным
циклам
шины Configuration Read и Configuration Write, вырабатываемым контроллером
при
обращении
процессора
к
регистрам
контроллера
шины
PCI,
расположенным в его пространстве ввода-вывода.
Увеличение производительности за счет повышения частоты и добавления
линий к шине. Поддерживаются несколько виртуальных каналов на один
физический. Теоретически полоса пропускания самого узкого канала достигает
2.5 Гб/с в каждом направлении. Система адресации и команд включает три
66
стандартных поля, совместимых с интерфейсом РСI (область памяти, адрес
ввода-вывода, инициализации и конфигурирования), а также дополнительное
поле сообщений.
AGP – ускоренный графический порт – интерфейсная шина, выделенная
для потока видеоданных.
Рис. 24. Структурная схема графического ускорителя с AGP
Теоретическая пиковая пропускная способность 2132 МБ/сек в режиме
передачи 32-разрядных слов
Обеспечивает прямое соединение между графической подсистемой и ОП.
Таким образом, выполняются требования вывода 3D-графики в режиме
реального времени и более эффективно используется память буфера кадра –
тем самым увеличивается скорость обработки 3D-графики. Шина AGP
соединяет графическую подсистему с контроллером системной памяти,
разделяя доступ с ЦП. Через AGP возможно подключение графических
плат. Основные особенности AGP, влияющие на производительность:
- способность передавать 2, 4 или 8 блоков данных за один цикл;
- устранена мультиплексированность линий адреса и данных:
- конвейеризация операций чтения/записи позволяет устранить влияние
задержек в модулях памяти на скорость выполнения этих операций.
Основные режимы работы AGP:
67
- DIME (Direct Memory Execute): локальная и системная память для
видеокарты логически равноправны; текстуры не копируются в локальную
память, а выбираются непосредственно из системной памяти.
- DMA (Direct Memory Access): основной памятью считается память на
карте; текстуры перед использованием копируются в локальную память
видеокарты; обмен ведется большими последовательными пакетами данных.
Интерфейс PCI Express
PCI Express, или PCIe, или PCI-E – компьютерная шина, использующая
программную модель шины PCI и высокопроизводительный физический
протокол, основанный на последовательной передаче данных. Развитием
стандарта PCI Express занимается организация PCI Special Interest Group. В
отличие от шины PCI, использовавшей для передачи данных общую шину, PCI
Express, в общем случае, является пакетной сетью с топологией типа звезда,
устройства
PCI
Express
взаимодействуют
между
собой
через
среду,
образованную коммутаторами, при этом каждое устройство напрямую связано
соединением типа точка-точка с коммутатором.
Кроме того, шиной PCI Express поддерживается:
• Горячая замена карт;
• Гарантированная полоса пропускания (QoS);
• Управление энергопотреблением;
• Контроль целостности передаваемых данных.
Разработка стандарта PCI Express была начата фирмой Intel после отказа от
шины InfiniBand. Официально первая базовая спецификация PCI Express
появилась в июле 2002 года. Шина PCI Express нацелена на использование
только в качестве локальной шины. Так как программная модель PCI Express во
многом унаследована от PCI, то существующие системы и контроллеры могут
68
быть доработаны для использования шины PCI Express заменой только
физического уровня, без доработки программного обеспечения.
Высокая пиковая производительность шины PCI Express позволяет
использовать её вместо шин AGP и тем более PCI и PCI-X. Для подключения
устройства PCI Express используется двунаправленное последовательное
соединение типа точка-точка, называемое lane; это резко отличается от PCI, в
которой все устройства подключаются к общей 32- разрядной параллельной
двунаправленной шине. Соединение между двумя устройствами PCI Express
называется link, и состоит из одного (называемого 1x) или нескольких (x2, x4,
x8, x12, x16 и x32) двунаправленных последовательных соединений lane.
Каждое устройство должно поддерживать соединение x1.
На электрическом уровне каждое соединение использует низковольтную
дифференциальную передачу сигнала (LVDS), приём и передача информации
производится
каждым
устройством
PCI
Express
по
отдельным
двум
проводникам, таким образом, в простейшем случае, устройство подключается к
коммутатору PCI Express всего лишь четырьмя проводниками.
5.4 Стандартные периферийные интерфейсы
Интерфейс SCSI
SCSI – интерфейс, разработанный для объединения на одной шине различных
по своему назначению устройств, таких как жёсткие диски, накопители на
магнитооптических дисках, приводы CD, DVD, стримеры, сканеры, принтеры и т.
д. Раньше имел неофициальное название Shugart Computer Systems Interface в
честь создателя Алана Ф. Шугарта. Теоретически возможен выпуск устройства
любого типа на шине SCSI. После стандартизации в 1986 году SCSI начал широко
применяться в компьютерах Apple Macintosh, Sun Microsystems.
В компьютерах, совместимых с IBM PC, SCSI не пользуется такой
популярностью в связи со своей сложностью и сравнительно высокой стоимостью
и применяется преимущественно в серверах. SCSI широко применяется на
69
серверах, высокопроизводительных рабочих станциях. RAID-массивы на серверах
часто строятся на жёстких дисках со SCSI-интерфейсом (однако, в серверах
нижнего ценового диапазона всё чаще применяются RAID-массивы на основе
SATA). В настоящее время устройства на шине SAS постепенно вытесняют
устаревшую шину SCSI.
Система команд SCSI на уровне программного обеспечения употребляется в
единых стеках поддержки устройств хранения данных в ряде операционных
систем, таких как Microsoft Windows. Существует реализация системы команд
SCSI поверх оборудования (контроллеров и кабелей) IDE/ATA/SATA, называемая
ATAPI – ATA Packet Interface. Все используемые в компьютерной технике
подключаемые по IDE/ATA/SATA приводы CD/DVD/Blu-Ray используют эту
технологию. Также система команд SCSI реализована поверх протокола USB, что
является частью спецификации класса Mass Storage device. Это позволяет
подключать через интерфейс USB любые хранилища данных (от флешнакопителей до внешних жёстких дисков), не разрабатывая для них собственного
протокола обмена, а вместо этого используя имеющийся в операционной системе
драйвер SCSI.
Существует три стандарта SCSI:
1. SE (single-ended) – асимметричный SCSI, для передачи каждого сигнала
используется отдельный проводник.
2. LVD (low-voltage-differential) – интерфейс дифференциальной шины
низкого напряжения, сигналы положительной и отрицательной
полярности идут по разным физическим проводам. На один сигнал
приходится по одной витой паре проводников. Используемое
напряжение при передаче сигналов +1,8 В.
3. HVD (high-voltage-differential) – интерфейс дифференциальной шины
высокого напряжения, отличается от LVD повышенным напряжением и
специальными приемопередатчиками.
70
Первый стандарт SCSI имеет 50-контактный неэкранированный разъем для
внутрисистемных соединений и аналогичный экранированный разъем типа
Centronics (Alternative 2) для внешних подключений. Передача сигналов
осуществляется 50 контактным кабелем типа A-50 на 8-разрядной (битной) шине.
Но надо иметь ввиду, что до появления SCSI, имевшего 50-контактный разъём, и
даже одновременно с ним был более старый SCSI, имевший 25- контактный
разъём, почти такой, как разъём LPT (например, в теперь уже почти вышедшем из
употребления сканере Mustek 1200 FS есть одновременно три разъёма: OPTION на
26 контактов, SCSI на 25 контактов, SCSI на 50 контактов).
В стандарте SCSI-2 для 8-битной шины предусматривался кабель типа A,
который, как и в SCSI-1, поддерживал 50-контактными разъемами типа D с
уменьшенным шагом выводов (Alternative 1). Разъемы типа Centronics (Alternative
2)
в
SCSI-2
построены
8-
и
16-битной
шине.
Передача
информации
осуществляется по 68-контактным кабелям типа A-68 и P-68(Wide).
Для 32- битной версии шины был предусмотрен тип кабеля B, который
должен был параллельно подключаться одновременно с кабелем A в одно
устройство. Однако кабель B не получил широкого признания и из стандарта
SCSI-3 исключен. В стандарте SCSI-3 кабеля A-68 и P-68 поддерживались
экранированными, либо неэкранированными разъемами типа D. Кабеля в SCSI-3
снабжены фиксаторами-защелками, а не проволочными кольцами, как разъемы
Centronics. Начиная с этой версии SCSI, в массивах накопителей используется 80контактный разъем, называемый Alternative 4. Накопители с таким разъемом
поддерживают горячее подключение устройств, т.е. устройства SCSI можно
подключать и отключать при включенном питании.
Интерфейс SAS
Serial Attached SCSI (SAS) – компьютерный интерфейс, разработанный для
обмена данными с такими устройствами, как жёсткие диски, накопители на
оптическом диске и т.д. SAS использует последовательный интерфейс для работы
с непосредственно подключаемыми накопителями (Direct Attached Storage (DAS)
71
devices). SAS разработан для замены параллельного интерфейса SCSI и позволяет
достичь более высокой пропускной способности, чем SCSI; в то же время SAS
совместим с интерфейсом SATA. Хотя SAS использует последовательный
интерфейс в отличие от параллельного интерфейса, используемого традиционным
SCSI, для управления SAS-устройствами по- прежнему используются команды
SCSI.
Протокол
SAS
разработан
и
поддерживается
комитетом
T10.
SAS
поддерживает передачу информации со скоростью до 3 Гбит/с. Благодаря
уменьшенному разъему SAS обеспечивает полное двухпортовое подключение как
для 3,5-дюймовых, так и для 2,5- дюймовых дисковых накопителей (раньше эта
функция была доступна только для 3,5-дюймовых дисковых накопителей с
интерфейсом Fibre Channel).
5.3
Малые периферийные интерфейсы
Последовательный интерфейс: RS-232C
Последовательный интерфейс для передачи данных использует одну
сигнальную линию, по которой информационные биты передаются друг за
другом
последовательно.
В
ряде
последовательных
интерфейсов
применяется гальваническая развязка внешних сигналов от схемной земли
устройства, что позволяет
соединять устройства, находящиеся под
разными потенциалами.
Последовательная
передача
данных
может
осуществляться
в
асинхронном или синхронном режимах. При асинхронной передаче
каждому байту предшествует старт-бит, сигнализирующий приемнику о
начале посылки, за которым следуют
биты данных и, возможно, бит
паритета (четности). Завершает посылку стоп-бит, гарантирующий паузу
между посылками (рис. 25). Старт-бит следующего байта посылается в
72
любой момент после стоп-бита, то есть между передачами возможны паузы
произвольной
длительности.
Старт-бит,
имеющий
всегда
строго
определенное значение (логический 0), обеспечивает простой механизм
синхронизации приемника по сигналу от передатчика. Подразумевается,
что приемник и
Внутренний
передатчик работают на одной скорости обмена.
генератор синхронизации приемника использует счетчик-
делитель опорной частоты, обнуляемый в момент приема начала старт-бита.
Этот счетчик генерирует внутренние стробы,
фиксирует
последующие
принимаемые
располагаются в середине битовых
по которым приемник
биты.
В
идеале
стробы
интервалов, что позволяет принимать
данные и при незначительном рассогласовании скоростей приемника и
передатчика. Очевидно, что при передаче 8 бит данных, одного
контрольного и одного стоп-бита предельно допустимое рассогласование
скоростей, при котором данные будут распознаны верно, не может
превышать 5%. С учетом фазовых искажений и дискретности работы
внутреннего счетчика
синхронизации реально допустимо меньшее
отклонение частот. Чем меньше коэффициент деления опорной частоты
внутреннего генератора (чем выше частота передачи), тем больше
погрешность привязки стробов к середине битового интервала, и
требования к согласованности частот становятся более строгими. Чем выше
частота передачи, тем больше влияние
искажений фронтов на фазу
принимаемого сигнала. Взаимодействие этих факторов приводит к
повышению
требований
к
согласованности
частот
приемника
и
передатчика с ростом частоты обмена.
73
Рис.25. Формат асинхронной передачи
Формат
асинхронной посылки позволяет выявлять возможные
ошибки передачи :
- если принят перепад, сигнализирующий о начале посылки, а по стробу
старт-бита зафиксирован уровень логической единицы, старт-бит
считается ложным и приемник снова переходит в состояние ожидания.
Об этой ошибке приемник может и не сообщать.
- если во время, отведенное под стоп-бит, обнаружен уровень логического
нуля, фиксируется ошибка стоп-бита.
- если применяется контроль четности, то после посылки бит данных
передается
контрольный
бит.
Этот
бит
дополняет
количество
единичных бит данных до четного
или нечетного в зависимости от
принятого
байта
соглашения.
Прием
с
неверным
значением
контрольного бита приводит к фиксации ошибки.
Контроль формата позволяет обнаруживать обрыв линии: при этом
принимается логический нуль, который сначала трактуется как старт-бит, и
нулевые биты данных, потом срабатывает контроль стоп-бита.
Для асинхронного режима принят ряд стандартных скоростей
обмена: 50, 75, 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400,
57600 и 115200 бит/с. Количество бит данных может составлять 5, 6, 7 или
8 (5- и
6-битные форматы распространены незначительно). Количество
стоп-бит может быть 1, 1,5 или 2 ("полтора бита"
означает только
длительность стопового интервала).
Синхронный режим передачи предполагает постоянную активность
канала связи. Посылка начинается с синхробайта, за которым сразу же
следует поток информационных бит.
передачи, он заполняет
Если у передатчика нет данных для
паузу непрерывной посылкой байтов
синхронизации. Очевидно, что при передаче больших массивов данных
74
накладные расходы на синхронизацию в данном режиме будут ниже, чем в
асинхронном. Однако
в синхронном режиме необходима внешняя
синхронизация приемника с передатчиком,
поскольку даже малое
отклонение частот приведет к искажению принимаемых данных. Внешняя
синхронизация возможна либо с помощью отдельной линии для передачи
сигнала синхронизации, либо с использованием самосинхронизирующего
кодирования данных, при котором на стороне приемника из принятого
сигнала могут быть выделены импульсы синхронизации.
На
физическом
уровне
последовательный
интерфейс
имеет
различные реализации, различающиеся способом передачи электрических
сигналов. В большинстве стандартов сигнал представляется потенциалом.
Существуют последовательные интерфейсы, где
информативен ток,
протекающий по общей цепи передатчик-приемник - "токовая петля". Для
связи
на
короткие
инфракрасной
простейший
связи.
расстояния
Наибольшее
последовательный
приняты
стандарты
распространение
интерфейс
в
беспроводной
PC
получил
стандарт
RS-232C,
реализуемый СОМ -портами. В промышленной автоматике
широко
-
применяется RS-485.
Интерфейс RS-232C
предназначен для подключения аппаратуры,
передающей или принимающей данные
от
оконечного
оборудования
данных (ООД, DTE - Data Terminal Equipment), к оконечной аппаратуре
каналов данных (АКД, DCE - Data CommunicationEquipment). В роли АПД
может выступать компьютер, принтер, плоттер и другое периферийное
оборудование. В роли
АКД обычно выступает модем. Конечной целью
подключения является соединение двух устройств АПД. Полная схема
соединения приведена на рис. 26. Интерфейс позволяет исключить канал
удаленной связи вместе с парой устройств
АПД, соединив устройства
непосредственно с помощью нуль-модемного кабеля (рис. 27).
75
Стандарт описывает управляющие сигналы интерфейса, пересылку
данных, электрический интерфейс и типы разъемов. В стандарте
предусмотрены асинхронный и синхронный режимы обмена, но СОМ порты поддерживают только асинхронный режим..
Рис. 26. Полная схема соединения по RS-232C
Рис. 27. Соединение по RS-232C нуль-модемным кабелем
Стандарт RS-232C использует несимметричные передатчики и
приемники - сигнал передается относительно общего провода - схемной
земли. Логической единице
приемника
диапазон
в
соответствует напряжение
на
входе
диапазоне -12...-3 В. Логическому нулю соответствует
+3...+12В.
Диапазон
-3...+3В
-
зона
нечувствительности,
обусловливающая гистерезис приемника: состояние линии будет считаться
измененным только после пересечения порога (рис. 28). Уровни сигналов
на выходах передатчиков должны быть в диапазонах -12...-5 В и +5...+12 В
для представления единицы и нуля соответственно.
76
Рис. 28. Прием сигналов RS-232C
Стандарт RS-232C регламентирует типы применяемых разъемов. На
аппаратуре АПД (в том числе на СОМ -портах) принято устанавливать
вилки
(male)
DB-25P
или
более
Девятиштырьковые разъемы не
компактный
вариант
-
DB-9P.
имеют контактов для дополнительных
сигналов, необходимых для синхронного режима
(в большинстве 25-
штырьковых разъемов эти контакты не используются). На аппаратуре АКД
(модемах) устанавливают розетки (female) DB-25S или DB-9S.
Если аппаратура АПД соединяется без модемов, то разъемы
устройств (вилки) соединяются между собой нуль-модемным
кабелем,
имеющим на обоих концах розетки, контакты которых соединяются
перекрестно.
SATA или Serial ATA — это последовательный интерфейс осуществления
обмена данными между накопителями информации. Интерфейс SATA является,
по сути, продолжением параллельного интерфейса ATA (или IDE), после
появления SATA переименованного в PATA (или Parallel ATA).
Изначально в стандарте SATA предусматривалась работа шины на частоте
1,5ГГц, обеспечивающая пропускную способность примерно в 1,2Гбит/с (или 150
МБ/с). Двадцатипроцентная потеря производительности связана с использованием
кодирования 8B/10B, при котором на 8 бит полезной информации используются
два служебных бита. У SATA/150 пропускная способность лишь незначительно
77
выше, чем пропускная способность шины UltraATA (UDMA/133). Основным
преимуществом
SATA
в
сравнении
c
PATA
считается
использование
последовательной, а не параллельной шины. И хотя последовательный способ
трансфера принципиально медленнее, чем параллельный, в нашем случае это
вполне компенсируется возможностью функционирования на более высоких
частотах из-за избежания осуществления синхронизации каналов, а также
большей помехоустойчивости кабеля. Этот эффект достигается благодаря
применению принципиально отличного способа трансфера данных.
Стандарт
SATA/300
функционирует
на
частоте
3ГГц,
обеспечивая
пропускную способность до 2,4Гбит/с (или 300МБайт/с). Впервые этот стандарт
был реализован в nForce4 контроллере чипсета компании «NVIDIA». Нередко
стандарт SATA/300 называется SATA II либо SATA 2.0. В принципе устройства
SATA/300 и SATA/150 должны быть совместимы между собой (т.е. контроллер
SATA/300 и устройство SATA/150, а также контроллер SATA/150 и устройство
SATA/300),
благодаря поддержке согласования скоростей (разумеется, в
меньшую сторону). Однако некоторые устройства и контроллеры требуют ручного
выставления режима работы. К примеру, на НЖМД Seagate, поддерживающем
SATA/300, предусмотрен специальный джампер для принудительного включения
SATA/150.
В спецификации SATA Revision3.0 предусмотрена возможность трансфера
данных на скорости до 6Гбит/с (или 600 Мбайт/с, учитывая особенности 10b/8b
кодирования). Среди улучшений SATA Revision3.0, в сравнении с предыдущими
версиями спецификации, отметим более высокую скорость, а также улучшенное
управление питанием. Совместимость в этом случае сохраняется, как на уровне
кабелей и разъемов SATA, так и для протоколов обмена.
В SATA используется семиконтактный разъём вместо аналогичного 40контактного разъёма, используемого в PATA. SATA-кабель отличается меньшей
площадью, вследствие чего снижается сопротивление воздуху, который обдувает
78
комплектующие компьютера, также упрощается разводка проводов, находящихся
внутри системного блока.
За счёт своей формы SATA-кабель гораздо более устойчив к многократным
подключениям.
Питающий
шнур
SATA
разработан
также,
учитывая
многократность подключений. Разъём питания SATA способен подавать три
напряжения питания: +5 В, +12 В, а также +3,3 В; современные устройства,
однако, способны работать и без напряжения +3,3 В - это позволяет использовать
пассивный переходник стандартного разъёма IDE на SATA. Некоторые SATAустройств снабжаются 2-мя разъёмами питания: Molex, SATA.
В стандарте SATA нет традиционного для PATA способа подключения по 2
устройства на каждый шлейф. Здесь для каждого устройства выделяется
отдельный
кабель,
что
позволяет
устранить
проблему
невозможности
параллельной работы устройств, которые находятся на одном кабеле, а также
возникавших из-за этого задержек. Уменьшаются также возможные проблемы,
возникающие при сборке (т.н. проблемы конфликта Slave-Master в SATA не
существует), устраняются ошибки, выскакивавшие при использовании не
терминированных шлейфов PATA.
В стандарте SATA не поддерживается функция очереди команд (начиная с
SATA Revision1.0a, NCQ).
В стандарте SATA до SATA Revision3.x не предусмотрена горячая замена
активного устройства, которое используется ОС, таким образом, подключенные
дополнительно диски отключать необходимо постепенно — сначала питание,
затем шлейф, а подключать наоборот — шлейф, затем питание.
Заключение
В вычислительной системе, состоящей из множества подсистем, необходим
механизм для их взаимодействия. Эти подсистемы должны быстро и эффективно
79
обмениваться данными. Например, процессор, с одной стороны, должен быть
связан с памятью, с другой стороны, необходима связь процессора с устройствами
ввода/вывода. Одним из простейших механизмов, позволяющих организовать
взаимодействие различных подсистем, является единственная центральная шина,
к которой подсоединяются все подсистемы. Доступ к такой шине разделяется
между всеми подсистемами. Подобная организация имеет два основных
преимущества: низкая стоимость и универсальность. Поскольку такая шина
является единственным местом подсоединения для разных устройств, новые
устройства могут быть легко добавлены, и одни и те же периферийные устройства
можно даже применять в разных вычислительных системах, использующих
однотипную шину. Стоимость такой организации получается достаточно низкой,
поскольку для реализации множества путей передачи информации используется
единственный набор линий шины, разделяемый множеством устройств.
Главным недостатком организации с единственной шиной является то, что
шина создает узкое горло, ограничивая, возможно, максимальную пропускную
способность ввода/вывода. Если весь поток ввода/вывода должен проходить через
центральную шину, такое ограничение пропускной способности весьма реально. В
коммерческих системах, где ввод/вывод осуществляется очень часто, а также в
суперкомпьютерах, где необходимые скорости ввода/вывода очень высоки из-за
высокой производительности процессора, одним из главных вопросов разработки
является создание системы нескольких шин, способной удовлетворить все
запросы. Одна из причин больших трудностей, возникающих при разработке шин,
заключается в том, что максимальная скорость шины главным образом
лимитируется
физическими
факторами:
длиной
шины
и
количеством
подсоединяемых устройств (и, следовательно, нагрузкой на шину). Эти
физические ограничения не позволяют произвольно ускорять шины. Требования
быстродействия (малой задержки) системы ввода/вывода и высокой пропускной
способности являются противоречивыми. В современных крупных системах
используется целый комплекс взаимосвязанных шин, каждая из которых
обеспечивает
упрощение
взаимодействия
различных
подсистем,
высокую
80
пропускную способность, избыточность (для увеличения отказоустойчивости) и
эффективность.
Традиционно шины делятся на шины, обеспечивающие организацию связи
процессора с памятью, и шины ввода/вывода. Шины ввода/вывода могут иметь
большую протяженность, поддерживать подсоединение многих типов устройств, и
обычно следуют одному из шинных стандартов. Шины процессор-память, с
другой
стороны,
сравнительно
короткие,
обычно
высокоскоростные
и
соответствуют организации системы памяти для обеспечения максимальной
пропускной способности канала память-процессор. На этапе разработки системы,
для шины процессор-память заранее известны все типы и параметры устройств,
которые должны соединяться между собой, в то время как разработчик шины
ввода/вывода должен иметь дело с устройствами, различающимися по задержке и
пропускной способности.
Как уже было отмечено, с целью снижения стоимости некоторые компьютеры
имеют единственную шину для памяти и устройств ввода/вывода. Такая шина
часто называется системной. Персональные компьютеры, как правило, строятся на
основе одной системной шины в стандартах ISA, EISA или MCA. Необходимость
сохранения
баланса
производительности
по
мере
роста
быстродействия
микропроцессоров привела к двухуровневой организации шин в персональных
компьютерах на основе локальной шины. Локальной шиной называется шина,
электрически выходящая непосредственно на контакты микропроцессора. Она
обычно объединяет процессор, память, схемы буферизации для системной шины и
ее контроллер, а также некоторые вспомогательные схемы. Типичными
примерами локальных шин являются VL-Bus и PCI.
Рассмотрим типичную транзакцию на шине. Шинная транзакция включает в
себя две части: посылку адреса и прием (или посылку) данных. Шинные
транзакции обычно определяются характером взаимодействия с памятью:
транзакция типа "Чтение" передает данные из памяти (либо в ЦП, либо в
устройство ввода/вывода), транзакция типа "Запись" записывает данные в память.
81
В транзакции типа "Чтение" по шине сначала посылается в память адрес вместе с
соответствующими сигналами управления, индицирующими чтение. Память
отвечает, возвращая на шину данные с соответствующими сигналами управления.
Транзакция типа "Запись" требует, чтобы ЦП или устройство в/в послало в память
адрес и данные и не ожидает возврата данных. Обычно ЦП вынужден простаивать
во время интервала между посылкой адреса и получением данных при
выполнении чтения, но часто он не ожидает завершения операции при записи
данных в память.
Разработка шины связана с реализацией ряда дополнительных возможностей
(рисунок 29). Решение о выборе той или иной возможности зависит от целевых
параметров стоимости и производительности. Первые три возможности являются
очевидными: раздельные линии адреса и данных, более широкие (имеющие
большую разрядность) шины данных и режим групповых пересылок (пересылки
нескольких слов) дают увеличение производительности за счет увеличения
стоимости.
Следующий термин, указанный в таблице, - количество главных устройств
шины (bus master). Главное устройство шины - это устройство, которое может
инициировать транзакции чтения или записи. ЦП, например, всегда является
главным устройством шины. Шина имеет несколько главных устройств, если
имеется несколько ЦП или когда устройства ввода/вывода могут инициировать
транзакции на шине. Если имеется несколько таких устройств, то требуется схема
арбитража, чтобы решить, кто следующий захватит шину. Арбитраж часто
основан либо на схеме с фиксированным приоритетом, либо на более
"справедливой" схеме, которая случайным образом выбирает, какое главное
устройство захватит шину.
В настоящее время используются два типа шин, отличающиеся способом
коммутации: шины с коммутацией цепей (circuit-switched bus) и шины с
коммутацией пакетов (packet-switched bus), получившие свои названия по
аналогии со способами коммутации в сетях передачи данных. Шина с
82
коммутацией пакетов при наличии нескольких главных устройств шины
обеспечивает значительно большую пропускную способность по сравнению с
шиной с коммутацией цепей за счет разделения транзакции на две логические
части: запроса шины и ответа. Такая методика получила название "расщепления"
транзакций (split transaction). (В некоторых системах такая возможность
называется шиной соединения/разъединения (connect/disconnect) или конвейерной
шиной (pipelined bus). Транзакция чтения разбивается на транзакцию запроса
чтения, которая содержит адрес, и транзакцию ответа памяти, которая содержит
данные. Каждая транзакция теперь должна быть помечена (тегирована)
соответствующим образом, чтобы ЦП и память могли сообщить что есть что.
Шина с коммутацией цепей не делает расщепления транзакций, любая
транзакция на ней есть неделимая операция. Главное устройство запрашивает
шину, после арбитража помещает на нее адрес и блокирует шину до окончания
обслуживания запроса. Большая часть этого времени обслуживания при этом
тратится не на выполнение операций на шине (например, на задержку выборки из
памяти). Таким образом, в шинах с коммутацией цепей это время просто теряется.
Расщепленные транзакции делают шину доступной для других главных устройств
пока память читает слово по запрошенному адресу. Это, правда, также означает,
что ЦП должен бороться за шину для посылки данных, а память должна бороться
за шину, чтобы вернуть данные. Таким образом, шина с расщеплением транзакций
имеет более высокую пропускную способность, но обычно она имеет и большую
задержку, чем шина, которая захватывается на все время выполнения транзакции.
Транзакция называется расщепленной, поскольку произвольное количество
других пакетов или транзакций могут использовать шину между запросом и
ответом.
Последний вопрос связан с выбором типа синхронизации и определяет
является ли шина синхронной или асинхронной. Если шина синхронная, то она
включает сигналы синхронизации, которые передаются по линиям управления
шины, и фиксированный протокол, определяющий расположение сигналов адреса
83
и данных относительно сигналов синхронизации. Поскольку практически никакой
дополнительной логики не требуется для того, чтобы решить, что делать в
следующий момент времени, эти шины могут быть и быстрыми, и дешевыми.
Однако они имеют два главных недостатка. Все на шине должно происходить с
одной и той же частотой синхронизации, поэтому из-за проблемы перекоса
синхросигналов, синхронные шины не могут быть длинными. Обычно шины
процессор-память синхронные.
Возможность
Общая
Высокая производительность
Низкая стоимость
Отдельные линии адреса и
разрядность
Мультиплексирование линий
данных
шины
Ширина
адреса и данных
Чем шире, тем быстрее (например,
(рязрядность)
Чем уже, тем дешевле
32 бит)
данных
Размер
(например, 8 бит)
Пересылка нескольких слов имеет
пересылки
Пересылка одного слова
меньшие накладные расходы
Главные
устройства шины
дешевле
Несколько (требуется арбитраж)
Одно (арбитраж не нужен)
Да - отдельные пакеты Запроса и
Расщепленны
е транзакции?
Нет - продолжающееся
Ответа дают большую полосу
соединение дешевле и имеет
пропускания (нужно несколько главных
меньшую задержку
устройств)
Тип
Синхронные
синхронизации
Асинхронные
Рис. 29. Основные возможности шин
Асинхронная шина, с другой стороны, не тактируется. Вместо этого обычно
используется
старт-стопный
режим
передачи
и
протокол
"рукопожатия"
(handshaking) между источником и приемником данных на шине. Эта схема
позволяет гораздо проще приспособить широкое разнообразие устройств и
84
удлинить шину без беспокойства о перекосе сигналов синхронизации и о системе
синхронизации. Если может использоваться синхронная шина, то она обычно
быстрее,
чем
асинхронная,
из-за
отсутствия
накладных
расходов
на
синхронизацию шины для каждой транзакции. Выбор типа шины (синхронной или
асинхронной) определяет не только пропускную способность, но также
непосредственно
физического
влияет
расстояния
на
емкость
системы
и
количества
ввода/вывода
устройств,
которые
в
терминах
могут
быть
подсоединены к шине. Асинхронные шины по мере изменения технологии лучше
масштабируются. Шины ввода/вывода обычно асинхронные.
85
Литература
1.
Гук М. Аппаратные интерфейсы ПК. – Питер.: Технология, 2002, 526с.
2.
Интерфейсы
COPM.
Справочник
по
телекоммуникационным
протоколам: — Москва, БХВ-Петербург, 2006 г.- 160 с.
3.
Интерфейсы V5.1 и V5.2. Справочник: Б. С. Гольдштейн, И. М.
Ехриель, В. Б. Кадыков, Р. Д. Рерле — Москва, 2003 г.- 288 с.
4.
Интерфейсы. Выбор и реализация: А. Лапин — Санкт-Петербург,
Техносфера, 2005 г.- 168 с.
5.
Эрглис К.Э. Интерфейсы открытых систем. – М.: Горячая линияТелеком, 2000.
6.
Авдеев
В.А.,
Гузик
В.Ф.
Компьютеры:
шины,
контроллеры,
периферийные устройства. - М.: Радио и связь, 2001. - 480 с.
7.
Мячев
А.А.
Интерфейсы
средств
вычислительной
техники:
Справочник. – М.: Радио и связь, 2003. – 352 с.
8.
Иди Ф. Сетевой и межсетевой обмен данными с микроконтроллерами.
– М.: Издательский дом «Додэка XXI», 2007. – 376 с.
9.
Парк Д., Маккей С., Райт Э. Передача данных в системах контроля и
управления. – М.: ООО «Группа ИДТ», 2007. – 480 с.
10. Кузьминов А.Ю. Интерфейс RS232. Связь между компьютером и
микроконтроллером. – М.: Радио и связь, 2004. – 168 с.
11. Ан П. Сопряжение ПК с внешними устройствами. – М. ДМК Пресс,
2001. – 320 с.
12. Агуров
П.
Последовательные
интерфейсы
ПК.
Практика
программирования. – СПб.: БХВ-Петербург, 2004. – 496 с
13. Web:Сервер OMG – http://www.omg.org
14. http://www.info-system.ru
15. http://interfaces.chat.ru/educat/interf2.html
86
87