Лекция № 5 Электромеханические приборы План лекции: 1.Основы теории и конструкции
реклама

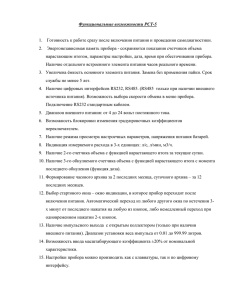
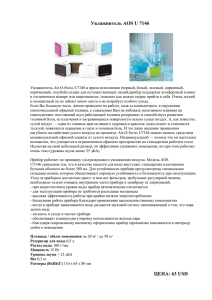
Лекция № 5 Тема лекции: “Электромеханические приборы” План лекции: 1.Основы теории и конструкции 2.Система маркировки 3.Приборы магнитоэлектрической системы 1.Основы теории и конструкции 1)Структурная схема электромеханического прибора: Измерительная цепь – обеспечивает преобразование входной электрической величины Х в промежуточную электрическую величину Y (ток, напряжение) для непосредственной обработки измерительным механизмом. Измерительная цепь представляет собой совокупность сопротивлений, индуктивностей, емкостей и др. элементов. Измерительный механизм – основная часть прибора, предназначенная для преобразования электромагнитной энергии в механическую (вращающий момент), необходимую для перемещения подвижной части относительно неподвижной (т.е. создания угла поворота ). Уравнение преобразования электромеханического прибора: f ( X ) f (Y ) . Отсчетное устройство – состоит из указателя, связанного с измерительным механизмом и шкалы. Указатели – бывают стрелочные (механические) и световые. Шкала – совокупность отметок, представляющих ряд последовательных чисел вдоль какой либо линии. К электромеханической группе принадлежат измерительные приборы магнитоэлектрической, электромагнитной, электродинамической, 1 ферродинамической, электростатической и индукционной систем. По физическому принципу, положенному в основу их строения, эти приборы относятся к группе аналоговых СИ, т.е. СИ, показания которых являются непрерывной функцией измеряемой величины. 2)Общий принцип действия измерительного механизма. Обобщенная механическая схема измерительного механизма представлена на рисунке. Элементы конструкции: 1- успокоитель ! 2 – неподвижная часть прибора 3 – грузики-противовесы ! 4 – спиральная пружинка ! 5 – подвижная часть 6 – указатель 7 – шкала 8 – корпус прибора 1.Успокоитель уменьшает колебания подвижной части около положения установившегося равновесия. 3.Грузики-противовесы уравновешивают подвижную часть и не дают ей смещаться с нулевой отметки при любых положениях прибора. 4.Спиральная пружинка создает противодействующий момент. В электромеханическом приборе измеряемая величина X преобразуется во вращающий момент, действующий на подвижную часть, выполненную в виде рамки, сердечника или диска. Под действием этого момента подвижная часть поворачивается относительно неподвижной части. По углу отклонения подвижной части , отмечаемому по шкале указателем, судят о числовом значении измеряемой величины. X M вр Дифференциальное уравнение моментов, описывающее работу 2 измерительного механизма, имеет вид: J ( d 2 dt 2 ) M , где J – момент инерции подвижной части измерительного механизма, - угол отклонения подвижной части, d 2 dt 2 На - угловое ускорение. подвижную часть (при движении) воздействуют следующие составляющие моментов: М М вр М пр М усп Вращающий момент – Мвр определяется скоростью изменения энергии электромагнитного поля, сосредоточенной в механизме, по углу отклонения : М вр dWэ d Чтобы каждому значению измеряемой величины X определенное отклонение стрелки , необходимо соответствовало уравновесить Мвр противодействующим моментом, который противоположен вращающему и возрастает по мере увеличения угла поворота подвижной части. Противодействующий момент - Мпр создается при помощи спиральных пружин и растяжек : М пр к где к – удельный противодействующий момент на единицу угла закручивания пружины (определяется её материалом, длиной и т.д.). Момент успокоения – Мусп - момент сил сопротивления движению, пропорционален скорости перемещения стрелки: М усп p d , dt где р - коэффициент успокоения подвижной части. Подвижная колебательную часть систему. устанавливалась в измерительного Для того механизма чтобы стрелка представляет прибора собой быстрее нужное положение и слишком долго не колебалась, применяют успокоители, которые и создают момент успокоения. 3 Различают воздушные, жидкостные и магнитоиндукционные успокоители. В воздушных и жидкостных успокоителях успокоение достигается торможением элемента подвижной части за счет трения о воздух или жидкость. В магнитоиндукционных успокоителях торможение происходит за счет взаимодействия МП магнита и токов в проводящих элементах подвижной части при их движении в поле этого магнита. Уравнение моментов в статическом режиме (уравнение статики), т.е когда стрелка прибора находится в неподвижном состоянии при каком-то угле отклонения : Мвр= Мпр 3)По типу измерительного механизма приборы делятся на системы: логометры 1.Прибор магнитоэлектрический: - с подвижной рамкой - с подвижным магнитом Прибор электромагнитный Прибор электродинамический Прибор ферродинамический Прибор электростатический Прибор индукционный Наиболее распространенными в практике технических измерений являются электромеханические приборы магнитоэлектрической и электромагнитной систем. 4 2.Система маркировки Для того чтобы можно было легко получить необходимую и достаточную характеристику каждого электроизмерительного прибора используют систему маркировки. Согласно ГОСТ, на лицевой стороне прибора, обычно на шкале, должны быть указаны при помощи условных обозначений: 1.единица измеряемой величины (например A,V, W); 2.класс точности прибора (1,5); 3.ГОСТ, по которому прибор изготовлен (ГОСТ 8711-60); 4.род тока (постоянный, переменный); 5.система прибора (электромагнитная); 6.группа прибора по условиям эксплуатации (Б – сухие помещения, В – полевые и морские условия, Т тропический климат); 7.рабочее положение прибора положение шкалы, ( вертикальное - - горизонтальное); 8.величина напряжения, на которое испытана изоляция прибора ( - на 2 кВ, - испытанию не подлежит); 9.номинальная частота (подчеркнута) область частоты (45-100-300Гц) и расширенная 10.шифр прибора (Э330); 11.год выпуска (1961); 12.заводской номер прибора.(№00000); 13.товарный знак завода-изготовителя (завод ЗИП); ·категория защищенности прибора от влияния внешних магнитных или электрических полей ( – от ЭП) – от МП, 3. Приборы магнитоэлектрической системы 1.Принцип действия Вращающий момент возникает в результате взаимодействия магнитного 5 поля постоянного магнита и магнитного поля катушки (рамки), по которой протекает ток. 2.Устройство Разновидности конструкций измерительных механизмов: ·c подвижной катушкой (более распространена, рассмотрена ниже) ·с подвижным магнитом (менее точны, их достоинство – малые габариты и более низкая стоимость) Элементы конструкции: 1 – постоянный магнит 2 – магнитопровод 3 – полюсные наконечники 4 – неподвижный сердечник 5 – спиральная пружинка 6 – подвижная катушка (рамка) 7 – магнитный шунт 8 - указатель 1- 4 – магнитная система механизма. В зазоре между полюсными наконечниками и сердечником создается сильное МП, в котором находится подвижная прямоугольная рамка, намотанная тонким медным или алюминиевым проводом на каркас. Спиральные пружинки, предназначенные для создания противодействующего момента, одновременно используются и для подачи тока в рамку. Рамка жестко соединена со стрелкой. 3.Вывод уравнения шкалы Уравнение шкалы – математическая зависимость, показывающая связь между измеряемой величиной и углом отклонения стрелки прибора . 1.Энергия электромагнитного поля: Wэ I , где I – ток, протекающий по катушке. - потокосцепление подвижной катушки, 2. B S , где В – индукция в воздушном зазоре между сердечником и полюсными наконечниками, S – площадь катушки, - число витков катушки, - угол поворота катушки. 6 3.При протекании по рамке тока, на нее действует вращающий момент, вызывающий отклонение рамки от нулевого (исходного) положения: М вр dWэ (B S I) d B S I. d d 4.В результате поворота рамки увеличивается противодействующий момент засчет закручивания (раскручивания) спиральных пластин: М пр к . 5.При отклонении рамки на некоторый угол , вращающий и противодействующий моменты сравниваются по величине и дальнейшее отклонение рамки прекращается. Наступает установившееся отклонение, соответствующее значению измеряемого тока. Уравнение статики: пусть Мвр= Мпр B S I к B S I к B S S I тогда S I I , к где SI – чувствительность прибора к току. Для получения зависимости угла отклонения от приложенного к рамке напряжения, подставим I U R рамки B S U SU U , к Rр где SU - чувствительность магнитоэлектрического прибора к напряжению. Чувствительности являются постоянными величинами и определяются постоянными для каждого прибора величины (B – магнитная индукция, S – площадь рамки, - число витков, к- удельный противодействующий момент спиральных пружин). Уравнение шкалы показывает, что шкала магнитоэлектрического прибора – линейна. Угол отклонения стрелки прибора – прямо пропорционален току, проходящему через рамку. 7 Подвижная часть магнитоэлектрического механизма обладает относительно большим моментом инерции. Поэтому при включении в цепь переменного синусоидального тока, среднее значение которого за период равно нулю, средний вращающий момент также равен нулю. Следовательно, приборами магнитоэлектрической системы непосредственно может измерять только постоянные токи. Для измерения в цепях переменного тока необходимо предварительно преобразовать переменный ток в постоянный. 4.Магнитоэлектрический логометр Магнитоэлектрический логометр (греч. Logos – отношение) – измеряет отношение двух токов. Не имеет противодействующего момента. Элементы конструкции: 1 и 2 – жестко скрепленные между собой катушки, по обмоткам которых протекают токи I1 и I2. Моменты М1 и М2, создаваемые взаимодействием МП постоянного магнита и токов катушек 1 и 2, направлены навстречу друг другу: М вр1 B1 S1 1 I 1 М вр 2 B2 S 2 2 I 2 , но B1 f1 ( ) , B2 f 2 ( ) . Тогда М вр1 f1 ( ) S1 1 I1 F1 ( ) I1 М вр 2 f 2 ( ) S 2 2 I 2 F2 ( ) I 2 . Уравнение статики: Мвр= Мпр F1 ( ) I1 = F2 ( ) I 2 или F ( I1 F2 ( ) F ( ) I 2 F1 ( ) I1 ) I2 Из уравнения шкалы видно, что угол поворота стрелки прибора зависит от отношения токов в рамках. Применяются логометрические механизмы в омметрах. 8 5.Назначение магнитоэлектрических приборов 1.измерение постоянных токов и напряжений (амперметры и вольтметры) 2.измерение сопротивлений (омметры) 3.измерение количества электричества (гальванометры и кулонметры) 4.регистрация электрических величин (самопишущие приборы). 6. Достоинства магнитоэлектрических приборов 1.наиболее точные (высокий класс точности) и чувствительные 2. малое потребление энергии 4.равномерность шкалы. 7.Недостатки магнитоэлектрических приборов 1.сложность конструкции 2.высокая стоимость 3.невысокая перегрузочная способность 4.невозможность работы на переменном токе без дополнительных преобразователей. 9