Перспективы развития моделирования частотно
реклама

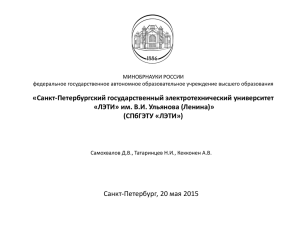
Перспективы развития моделирования частотно-регулируемых электроприводов для нефтегазопромыслового оборудования Еркеев Р.Ф. Научный руководитель: канд. техн. наук, доцент Бабакин В.И. ГОУ ВПО «Уфимский государственный нефтяной технический университет», г. Уфа В мире ежегодно выпускается порядка семи миллиардов электродвигателей. В основном это двигатели переменного тока, которые потребляют около 70% общего количества произведенной электроэнергии и, соответственно, являются основными потребителями электроэнергии. Поэтому в настоящее время первостепенное значение, наряду с задачами оптимального конструирования асинхронных, синхронных двигателей и их разновидностей, приобретает задача оптимального моделирования электроприводов переменного тока. Электропривод обеспечивает преобразование электрической энергии в механическую в соответствии с алгоритмом работы технологической установки (центробежный насос, газоперекачивающий агрегат и т.д.) и от того, как будут подобраны силовые компоненты и управляющие алгоритмы, будет зависеть его эффективность. Современный электропривод представляет собой конструктивное единство устройства управления, электродвигателя и силового преобразователя. Как правило, управление электроприводом переменного тока осуществляется за счет изменения выходных параметров силового преобразователя (частота, напряжение т.д.). В зависимости от специфики применения электропривода в нефтегазовой отрасли, выбирают тип преобразователя, схемотехническое исполнение, способы и алгоритмы управления. Рассмотрим наиболее распространенные из них. Источник электрической энергии может быть как переменного, так и постоянного тока. При источнике переменного тока для создания промежуточного звена постоянного тока используется выпрямитель. На практике, кроме сети переменного тока со стандартными параметрами — трехфазное напряжение 380 В, 50 Гц или, для маломощных электроприводов, — однофазное напряжение 220 В, 50 Гц, в нестационарном оборудовании встречаются автономные сети с другими параметрами — трехфазное переменное напряжение 220 В, 400 Гц или 50 Гц, напряжение 110 или 220 В постоянного тока. Причем автономные источники отличаются, как правило, существенной нестабильностью напряжения, разброс которого составляет от –50% до +40%, а также наличием значительных импульсных перенапряжений. Наиболее широкое распространение в мировой практике получили силовые преобразователи с промежуточным звеном постоянного тока и трехфазным инвертором, для них в первую очередь освоено массовое производство компонентов для цифрового управления электроприводом. Схемное решение будет определяться методом управления электродвигателем в условиях добычи и транспортировки нефти, газа и газоконденсата. Скалярный метод, применяется в случаях, когда зависимость момента нагрузки электродвигателя известна и нагрузка практически не меняется при одном и том же значении частоты, а так же нижняя граница регулирования частоты не ниже 5…10 Гц при независимом от частоты моменте. При работе на центробежный насос или вентилятор (это типичные нагрузки с моментом, зависящим от скорости вращения) диапазон регулирования частоты – от 5 до 50 Гц и выше. Скалярный с обратной связью по скорости – для прецизионного регулирования с известной зависимостью момента от скорости вращения. Необходимо использовать импульсный датчик скорости, например инкрементальный энкодер. Векторный – для случаев, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т.е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходимо получить расширенный диапазон регулирования частоты при номинальных моментах, например, 0…50 Гц для момента 100% или даже кратковременно 150-200% от Мном. Время реакции преобразователя на изменение выходного тока (момента нагрузки) составляет 50…200 мсек. Векторный с обратной связью по скорости – для прецизионного регулирования (необходимо использовать инкрементальный энкодер) скорости, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т.е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходим максимальный диапазон регулирования частоты при моментах близких к номинальному. В соответствии с высокими требованиями, предъявляемыми к современным электроприводам, можно выделить следующие основные приоритеты развития алгоритмов управления: 1. Точность отработки программного задания (скорости или положения ротора). Это требование актуально в смысле возможных подсинхронных колебаний скорости ротора. Кроме этого, существуют ограничения на динамические режимы машины - с использованием существующих робастных методов можно сформировать практически любой переходный процесс, но скачки токов вредны для двигателя. 2. Нечувствительность к неопределенностям параметров двигателя переменного тока и помехам. При наличии больших коэффициентов усиления регуляторов, обеспечивающих робастность системы, последняя становится чувствительной к высокочастотным помехам. 3. Минимизация электропотребления. Разработка алгоритмов, оптимизирующих потребляемую электроприводом мощность как в статических, так и в динамических режимах, может быть осуществлена за счет размагничивающих токов продольной оси. 4. Расширение диапазона регулирования в сторону малых скоростей. Проблема связана с влиянием пульсаций момента на малых скоростях. При больших скоростях пульсации момента не оказывают существенного влияния, т.к. они фильтруются за счет инерционности ротора. 5. Уменьшение количества датчиков. Использование встроенных оптических датчиков положения в современных приводах и получение скорости путем дифференцирования положения является приемлемым путем решения данной проблемы. Однако следует отметить, что бездатчиковые алгоритмы более чувствительны к разбросу параметров. 6. Простота алгоритмов в аспекте вычислительной нагрузки. Несмотря на стремительный рост мощности процессоров, более простые алгоритмы обеспечивают меньшее время расчета, а значит, и фазовую задержку управления. Кроме того, более простые алгоритмы позволяют использовать более дешевые микропроцессоры. 7. Исследование работоспособности с многомассовыми объектами управления. Электродвигатели с частотным регулированием часто применяется как серводвигатели в роботизированных системах, динамика которых очень сложна. Такие объекты относятся к классу неопределенных. В то же время, требования к точности управления роботами очень высоки, что ставит соответствующую задачу. Разработка современного электропривода переменного тока связано со значительными трудностями уже на первых этапах. Поэтому необходимо использовать имитационное моделирование с использованием ЭВМ. Такой подход позволит спрогнозировать результаты с достаточно высокой точностью. Рассмотрим пример моделирования электропривода с частотным управлением на базе синхронного двигателя с постоянными магнитами. Моделирование выполним в программном пакете MatLab 7 с использованием среды визуализации Simulink. В настоящее время известен ряд алгоритмов моделирования электроприводов в статических и динамических режимах. Рассмотрим один из наиболее полных с учетом следующих общепринятых допущений: • насыщение магнитопровода не учитывается; • индуктивность обмоток не зависит от величины тока; • величина температуры не влияет на свойства постоянного магнита. Полная система уравнений динамики, описывающая переходные и установившиеся (t → ∞) процессы двигателя, должна состоять из уравнений для токов, выражения для электромагнитного момента, а также из уравнения динамики. Запишем эти уравнения в дифференциальной форме: 1. Уравнения для токов. 2. Выражение для электромагнитного момента двигателя 3. Уравнение для скорости (уравнение динамики) Рисунок 1. Математическая модель синхронного электропривода с постоянными магнитами Рисунок 2. Осциллограммы тока статора и магнитного поля (слева), скорости и момента (справа). Исследования и имеющийся опыт показывают, что частотно-регулируемые электродвигатели вносят ряд особенностей при построении схем электроснабжения и оказывают влияние на протекание электромагнитных и электромеханических процессов в динамических и установившихся режимах. Процессы коммутации в преобразователях частоты, сопровождающиеся генерированием высших гармоник, перегружающих силовые электрические и магнитные цепи, приводя к ложным срабатываниям аппаратуры защиты и управления, ускоренному старению изоляции, разрушают батареи статических конденсаторов. Кроме того гармоники существенно влияют на рабочие параметры приводных электродвигателей: усиливаются шум и вибрации, искажаются величины скорости и момента. В заключение отметим, что, несмотря на серьезную аппаратную поддержку современного электропривода переменного тока, остается ряд задач, связанных с оптимальным моделированием привода. Эти задачи являются решаемыми, что дает уверенность в возможности быстрой разработки нового поколения перспективных цифровых систем управления электроприводами для нефтегазопромыслового оборудования. Список использованной литературы 1. Высоцкий В.Е., Зубков Ю.В., Тулупов П.В. Математическое моделирование и оптимальное проектирование вентильных электрических машин. - М.: Энергоатомиздат, 2007. 2. Овчинников И.Е. Вентильные электрические двигатели и привод на их основе. - СПб.: КОРОНА-Век, 2006. 3. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. - СПб.: КОРОНА принт, 2001. 4. Остриров В. Н. Энергосберегающий комплектный электропривод производства ИБП РАН // Приборы. 2002. № 8.