Синтез систем автоматического управления, Методические
реклама

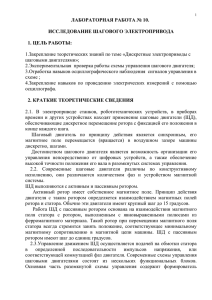
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Алтайский государственный технический университет им. И.И. Ползунова» Стальная М.И. СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ Методические указания и задания к курсовому проекту для студентов энергетических специальностей Барнаул 2013 УДК 681.51.013-52(075.5) М.И.Стальная Синтез систем управления. Методические указания и задания к курсовому проекту для студентов энергетических специальностей Алтайский государственный технический университет им. И.И. Ползунова. Барнаул: АлтГТУ, 2013 г.- 09 с. Дана методика выполнения курсового проекта, приведены задания (по вариантам) к курсовому проекту, исходные данные на проектирование, требования к оформлению. Рассмотрены и одобрены на заседании кафедры АЭП и ЭТ Протокол № от 2012 г. 2 Введение Одной из главных задач развития народного хозяйства является повышение эффективности общественного производства и качества продукции. Выполнение этой задачи в области промышленности связано с совершенствованием процессов управления технологическими процессами на основе широкого применения комплексных систем автоматизированного электропривода с использованием микропроцессорных средств и микро ЭВМ. В настоящее время при ограниченных сроках создания и освоения высокопроизводительных станков с ЧПУ, промышленных роботов и в целом робототехнических комплексов, большие значения приобретают вопросы синтеза более совершенных и универсальных систем автоматического управления электромеханических приводов, особенно с использованием синхронно-шаговых двигателей (СШД). Это обусловлено тем, что, приближаясь по своим свойствам к непрерывным приводам постоянного и переменного тока, электроприводы с СШД при дискретном управлении имеют следующие преимущества: - имеют возможность реализовать очень низкие значения скорости и в связи с этим обладают значительно большим диапазоном регулирования скорости без использования обратных связей; - имеют возможность осуществлять фиксацию конечных координат перемещения при отработке любого, как большого, так и микроскопически маленького расстояния заданного без датчиков и конечных выключателей; - устойчиво работают при изменении условий окружающей среды, при внешних механических ударах и вибрации; - имеют простую конструкцию, обладают большей компактностью, имеют большую надежность, так как нет вращающихся контактных соединений; - САУ СШД обычно строится на дискретных элементах, легко сопрягающихся с ЭВМ, что очень важно для электроприводов с УЧПУ. Рис.1 Эти преимущества обеспечили успешное применение СШД в электроприводах различного назначения и различной мощности. Типичная функциональная блок-схема простейшего электропривода с СШД имеет вид (рис.1) На рис.1 используются следующие блоки: ГТИ - генератор тактовых импульсов; 3 ЗУ(ВУ) - устройство, вырабатывающее задающий сигнал того или иного кода или вида; П - преобразовательное устройство, обеспечивающее реверс, программный разгон, торможение, старт-стопный режим двигателя, а также включающее в себя блоки искусственного или естественного дробления шага. Оно преобразует задающий сигнал и тактовые импульсы в ту или иную систему команд, поступающих на коммутатор; К - коммутатор - устройство, обеспечивающее поступление в соответствующей последовательности напряжений в обмотке СШД. Коммутатор обычно состоит из распределителя импульсов, логической части и выходных усилителей. 1 ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ 1.1 Требования к оформлению Расчетно-пояснительная записка к курсовой работе «Синтез АСУ СШД» оформляется на листах 11 формата с полями, указанием страниц и титульным листом, на котором обязательно должен быть указан номер варианта. Кроме того, в записке обязательно должно быть: задание на проект в соответствии с вариантом (исходные данные); приведено обоснование всех принятых решений; изложены методы расчетов, сами расчеты и результаты расчетов в табулированном или графическом виде; приведены все расчетные формулы, соотношения и пояснения к ним. Текст пояснительной записки располагается в соответствии с содержанием и разбивается на разделы и подразделы с обозначением соответственно 1, 2, 3 и т.д. и 1.1, 1.2,....2.1, 2.2, 2.3.... и т.д. Содержание записки должно быть кратким, четким, исключающим возможность субъективного толкования. Записка должна начинаться содержанием, затем введение, где объясняется суть курсовой работы и заканчиваться общими выводами и рекомендациями (заключением). Наименование параграфов должно быть кратким, соответствовать содержанию. В конце должен приводится список использованной литературы с указанием полного названия книги, фамилии и инициалов авторов, года издания, номера или номеров страниц, которые были необходимы в ходе выполнения курсовой работы. Схемы, графики и рисунки изображаются на миллиметровой бумаге форматом 11, при этом на одном листе могут располагаться более одного рисунка. Рисунки и схемы затем соединяются в общем итоговом чертеже всего устройства. Все схемы представленные на рисунках должны быть выполнены в соответствии с Единой Системой Конструкторской Документации (ЕСКД). Сокращение слов в заголовках, тексте и подписей под иллюстрациями, за исключением общепринятых, не допускается. Значения всех символов и 4 числовых коэффициентов, входящих в формулы, должны быть приведены непосредственно под формулами. Нумерация страниц расчетно-пояснительной записки делается сквозной, включая листы с рисунками. 1.2 Программа выполнения курсовой работы Таблица 1.1 № этапа № п/п Наименование раздела I 1 2 Выдача задания и № варианта Синтез схемы реверсивного РИ в коммутаторе СУ шагового двигателя Определение цены деления шага в пространственных градусах Синтез схемы реверсивного РИ с разночастотными генераторами Рассчитать время трогания СШД Рассчитать параметры НЧГИ и ВЧГИ Выбрать и рассчитать параметры формирователя импульсов Синтез схемы СУ СШД при искусственном дроблении шага Составить диаграмму работы по обмоткам СШД с искусственным дроблением шага Синтез схемы СУ СШД при старт-стопном торможении Синтез схемы СУ СШД с программным разгоном Синтез схемы СУ СШД с самокоммутацией Оформление пояснительной записки и чертежей. При оформлении на каждый разработанный блок привести полную спецификацию расчитанного оборудования 3 4 II 5 6 7 8 III 9 IV V 10 11 12 13 VI Кол-во недель 1 неделя 1 неделя 1 неделя 1 неделя 1 неделя 1 неделя В табл.1.1 приведены следующие сокращения: РИ - распределитель импульсов; НЧГИ - низкочастотный генератор импульсов; ВЧКИ - высокочастотный генератор импульсов. 2. ИСХОДНЫЕ ДАННЫЕ НА ПРОЕКТИРОВАНИЕ 2.1. Задание Синтезировать дискретную САУ автоматизированного электропривода с СШД, используемого в комплексных УЧПУ металлорежущих станков, промышленных роботов и роботизированных технологических линиях. При этом произвести аналитические преобразования и вычисления необходимые для выполнения работы при разработке схем системы автоматического управления различными режимами работы СШД. В соответствии с вариантом, заданным преподавателем, выполнить весь комплекс работ по каждому разделу (табл.1.1). 5 При выполнении I этапа необходимо: 1. произвести синтез распределителя импульсов СУ реверсивного электропривода с СШД на дискретно-логических элементах с использованием микросхем типовых серий в соответствии с заданным вариантом; 2. определить цену деления шага в пространственных градусах; 3. изобразить силовую схему включения обмоток, нарисовать циклограмму работы шагового двигателя, составить алгоритм работы обмоток, привести векторную диаграмму, разработать принципиальную и монтажную схемы узлов или блоков САУ, а также нарисовать ее печатную плату; 3. привести описание работы с учетом конкретно выбранной базы микросхем. При выполнении II этапа необходимо: 1. разработать алгоритм работы реверсивного РИ без изменения последовательности подаваемых импульсов напряжения на обмотках шагового двигателя; 2. рассчитать верхнюю и нижнюю границы частоты высокочастотного генератора импульсов и длительность сигналов формирователя импульсов; 3. разработать принципиальные схемы ВЧГИ и НЧГИ, а также ФИ (формирователь импульсов). Разработанные устройства согласовать с предыдущей схемой РИ; 4. рассчитать параметры ВЧГИ и НЧГИ; 5. нарисовать циклограмму работы РИ; 6. Описать работу разработанного РИ. При выполнении III этапа необходимо: 1. рассчитать и синтезировать схему генератора импульсов для схемы с искусственным дроблением шага в соответствии с заданной частотой низкочастотного генератора и заданной кратностью дробления шага Кдр.; 2. нарисовать диаграмму работы во времени по тактам с искусственным дроблением шага с учетом только фазности двигателя; 3. составить монтажную схему с учетом заданного базиса микросхем и числа микросхем на плате. При выполнении IV этапа необходимо: 1. Перевести двигатель на скорость 0,1 приемистости; 2. синтезировать схему старт-стопного управления СШД, осуществляемого после нажатия на кнопку «стоп»; 3. рассчитать время задержек tр и tр. При выполнении V этапа необходимо: 1. синтезировать САУ пуска СШД в режиме программного запуска или запуска с самокомутацией в соответствии с вариантом. 2.2. Варианты задания Вариант задания определяется преподавателем (табл.2.1) в буквенном и цифровом виде следующим образом. Например, вариант: А-1, Б-2, В-4, Г-3, или А1, Б2, В4, Г3. Это значит, что студент должен из I, II, III, IV, и V разделов выбрать по пункту А - первый вариант данных, по пункту Б - второй вариант, т.е. например из раздела I это будет: фазность СШД - 2, симметричное управление; по разделу II это будет: номинальное напряжение двигателя 24В, конструктивный параметр - Км= 1,8 и т.д. 6 Таблица 2.1 Раздел Индекс пункта А Б I Наименование и содержание раздела Параметры двигателя а) фазность СШД б) порядок включ. обмотки Характеристика СУ а) полярность Варианты 1 2 3 4 2* сим. 3 несим 4** 5 несим Разнопол . Однопол . Двух. комп Двух. компл Дтриг К176 2 Однопо л. б) комплектность В Число микросхем на плате Г 3 В схеме использовать преимущественно Использовать серию микросхем А II III Б В Г А Б В Г А IV Б В Параметры двигателя а) номинальное напряжение, В б) конструктивный параметр Км Параметры обмотки возбуждения а) активное сопротивление Rов, Ом б) индуктивность Lов, Гн Момент сопротивления на валу двигателя Мс Нм Частота низкочастотного генератора, Гц Коэффициент дробления шага Кдр Базис микросхем Число микросхем на плате Схема генератора Принудительное торможение после «n» шагов Естественное торможение после «n» шагов Момент инерции привода (кгм2) Момент двигателя (нм) J-К триг. К155 одно компл 5 логику К564 К555 64 1,8 96 0,91 110 1,56 70 1,3 9,2 8,5 10 7,5 4·103 103·5 1,6 250 1,4 165 4,2· 103 1,2 255 7 К531 6 на транзис тор 4 ∞ 4 на таймер 3,7· 103 0,9 135 5 К176 5 на опер. усил. ∞ 18 5 ∞ 14 20 12 6 0,01 2,4 0,00125 2,01 0,0003 2,35 0,015 1,28 програм . разг. 10,9,8,1 2,11(%) С самоком мут. програм. разг. 11,15,8, 10,12(%) С самокомму т 8 К155 ∞ на логич. элем Г Осуществить пуск двигателя в режимах. Программный разгон осуществить с задержкой по времени между ступенями в процентах *- всегда брать разно-полярное управление обмоток СШД; ** - всегда брать однополярное управление обмоток СШД. 3. ПОЯСНЕНИЯ К ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ . Пояснения по разделу II При расчете ВЧГИ необходимо учесть, что верхняя граница высокочастотного генератора импульсов рассчитывается с учетом общего 7 времени прохождения сигнала от выхода ВЧГИ до выхода коммутатора К по цепочке логических элементов и триггеров. При этом рекомендуется принимать время прохождения сигнала через простейший логический элемент не более 100 мс (от 20 до 100 мс). Нижняя граница высокочастотного генератора импульсов рассчитывается таким образом, чтобы за отрезок времени равный длительности импульса tи, двигатель не успел бы тронуться с места, т.е. tи = Тц/2 < tтр. При этом время начала трогания tтр определяется из следующих соотношений. 1. Напряжение, подаваемое на обмотку возбуждения, тратится на падение напряжения на активном и индуктивном сопротивлении, т.е. Uндв =IовR + Ков· dIов/df (1) 2. Начало трогания двигателя будет тогда, когда момент, развиваемый двигателем станет равным, а потом больше момента сопротивления, т.е. Мдв Км · Iс = Мс (2) где Iс - это ток в обмотке возбуждения необходимый для того, чтобы двигатель тронулся с места. Тогда, решая уравнение (1) относительно тока и учитывая, что Тов=Lов/Rов - постоянная времени обмотки возбуждения, имеем Iов = Uндв/ Rов (1-1/exp t/Тов) (3) Решив уравнения (2) и (3) относительно tтр необходимо принять нижнюю границу частоты ВЧГИ как f ≥ 1/2 tтр, а tи < tтр. Длительность сигналов формирователя импульсов рассчитывается так, чтобы в этой длительности уместился Кt-1 сигнал высокочастотного генератора импульсов, где Кt - число тактов. Литература 1. Арменский Е.В., Прокофьев П.А., Фало Т.Б. Автоматизированный электропривод.- М.: Высшая школа, 1987.- 144 с. 2. Стальная М.И. Элементы аналоговой и дискретной автоматики систем УЧПУ. Учебн. пособие/ Алт.гос.техн.ун-та им.И.И.Ползунова.- Барнаул, 1993.82 с. 3. Терехов В.М. Элементы автоматизированного электропривода. М.: Энергоатомиздат,1987.- 52 с. 4. Программное управление станками и промышленными роботами. М.: Высшая школа, 1989.- 235 с. 5. Гейтер Г.Р., Ильяшенко В.П. и др. Проектирование бесконтактных логических схем автоматического управления. М.: Энергия, 1970.- 263с. 6. Сазонов А.А., Лукичев А.Ю. и др. Микроэлектронные устройства автоматики. М.: Энергоатом, 1991 г. – 384 с. 8 Мая Ивановна Стальная СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ Методические указания и задания к курсовому проекту для студентов специальности 180400 Подписано в печать 2003г. Формат 60х84 1/16. Печать - ксерокопия. Усл.п.л. 0.6. Уч.-изд.л. 0,6. Тир. 30 экз. Издательство Алтайского государственного технического университета им.И.И.Ползунова, 656099, г.Барнаул, пр-т Ленина, 46 Лицензия на издательскую деятельность ЛР № 020822 от 21.09.98 г. Отпечатано на кафедре АЭП и ЭТ. (ксерокопия) 9