Методы и модели технического анализа инвестиционного
реклама

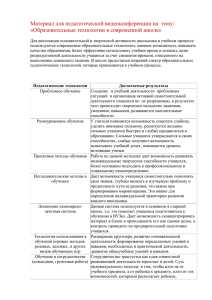
Методы и модели технического анализа инвестиционного проекта в промышленной логистике1 (Мищенко А.В., профессор, д.э.н. МГТУ им Н.Э.Баумана, Степанова М.С., аспирантка МГТУ им. Н.Э.Баумана) Рассматривая инвестиционный проект с технической точки зрения необходимо отметить, что, как правило, проект представляет собой сложную систему создаваемую с целью достижения заданных целей на основе реализации определенных инженерных и организационных решений при ограниченных капиталовложениях. Возможность технической осуществимости проекта определяются путем проведения экспертизы, которая дает комплексную оценку как всей системы в целом, так и ее отдельных элементов обеспечить эффективное и длительное функционирование проектируемого объекта на этапе его эксплуатации. В центре внимания технической экспертизы находится хозяйственный объект как логично построенная совокупность зданий, сооружений, машин, механизмов и оборудования с потоками сырья, материалов, комплектующих и т.д. С точки зрения конечных результатов инвестиционного проекта технический анализ должен подтвердить, что активы, которые будут вовлечены в проектную деятельность, способны обслужить выпуск продукции в объемах, необходимых для признания проекта эффективным. Для этого, в частности, определяется маркетинговая концепция, соответствующий объем продаж, производственная программа, оцениваются необходимые производственные мощности, состав оборудования, его технические характеристики и технология использования. В последнем случае необходимо оценить степень загрузки оборудования в производственном процессу, непроизводственные потери времени на его настройку (переналадку) на те или иные операции. В работе [1] отмечено, что если один и тот же тип оборудования используется для выполнения многих операций, то суммарные потери времени на настройку на каждую из операций могут быть сокращены за счет выбора оптимальной последовательности переналадок. Математическая постановка такой задачи состоит в следующем. Детерминированная модель оптимизации длительности переналадок При выполнении проекта, состоящего из определенного набора работ, для достижения критерия оптимальности важно не только определить последовательность самих работ, но и принимать во внимание такой аспект, как длительность настройки машины перед выполнением некоторой задачи. Эту длительность нельзя считать независимой от характера предшествующей работы. Разброс длительности настройки в таких случаях является основным критерием оценки расписания. Иллюстрацией такого производства может служить производство красок. Краски различного цвета получают на одном и том же оборудовании, которое очищается при каждой перемене цвета производимой краски. Суммарная длительность очистки сильно зависит от последовательности перехода от цвета к цвету. В промышленном производстве также существует много примеров, когда различные изделия производятся одним и тем же устройством, и в каждый момент времени вырабатывается лишь один из них. Таким примером является ситуация, возникающая при прокатке стальных полос. При прокатке полос разной ширины возникает необходимость остановки оборудования для переналадки, так как более широкие полосы могут быть испорчены, если оборудование не будет переналажено после прокатки более узкой полосы. Работа представляет материалы гранта: «Индивидуальный исследовательский проект № 07-01-81 «Методы управления инвестициями в логистике», выполнена при поддержке ГУ-ВШЭ 1 Иногда перенастройка не занимает продолжительного времени, связанного, например, лишь с кратковременными остановками и небольшими регулировками, в других ситуациях могут быть значительные затраты времени на переналадку, как, например, в случае перехода от штамповки партии одинаковых изделий к изготовлению серии отдельных образцов. Производственный опыт показывает, что в промышленности аналогичность настройки играет большую роль при упорядочении, чем любой другой фактор. Если настройка не зависит от упорядочения, то ее длительность можно включить в длительность работы p . В данном случае длительность настройки задается отдельно в i виде матрицы настроек S = ( sij ), где s ij представляет длительность настройки при переходе от работы i к работе j. Часто бывает удобно к n заданным работам добавить (n+1)-ю работу, означающую простои устройства, и выделить в упорядочении позицию «0», соответствующую исходному состоянию простоя. Тогда элемент s[ 0 ],[1] равен времени, необходимому устройству для перехода из состояния простоя в состояние готовности к выполнению первой работы в установленном порядке. Наличие настройки изменяет величины, определяющие процесс обслуживания. Длительность прохождения всех работ определяется следующим образом: F [1] = s[0],[1] + p , [1] F F = [ 2] [1] + s [1],[ 2 ] + p [ 2] , ……………………………… F [i] = F [i1] + s[i1],[i ] + p . [ i] Оптимизация по критерию максимальной длительности прохождения представляет собой следующую задачу. n F max = F n = s[i 1],[i ] + i 1 n p i 1 [i ] . Сумма длительностей самих работ в этом случае считается постоянной и может не учитываться. Поэтому длительность прохождения работ минимальна, когда минимальна длительность всех настроек. Эта задача сводится к так называемой задаче коммивояжера, где он должен проехать через каждый из n городов, посетив его один раз, и вернуться в исходный пункт, затратив на это минимальное количество времени. В данном примере каждая работа соответствует городу, а длительность настройки – расстоянию между городами. Поскольку первоначальное состояние рассматривается как работа, то данная задача составления расписания аналогична задаче коммивояжера, посещающего (n+1) город. В общем случае задается матрица S порядка n (матрица длительностей). Нужно найти такую матрицу X порядка n с элементами xik = 0 или 1, i = 1, …, n, n x i 1 ik = 1, k =1,…, n, ik = 1, i=1,…,n, n x k 1 n чтобы сумма n x s i 1 k 1 ik ik была минимальна. Решение задачи методом ветвей и границ. В общем виде в основе решения лежит последовательное преобразование составленных определенным образом матриц, приводящее к одной из трех стандартных возможностей. 1) получению решения, когда решение находится непосредственно по исходной матрице, 2) исключению матрицы из дальнейшего рассмотрения, когда можно показать, что из нее не следует решение задачи. 3) ветвлению, состоящему в том, что решаемая задача приводится к рассмотрению двух вариантов менее громоздких задач. Рассмотрим производственную задачу по производству красок, решаемую при помощи алгоритма задачи коммивояжера. Данная задача задается матрицей S порядка n, для которой sij определяет время очистки оборудования при переходе от изготовления одной краски (i) к другой (j). Решением задачи является производство красок всех цветов, задаваемых перестановкой индексов 1, 2, …, n. Полученное решение представляет собой сумму n слагаемых, каждое из которых определяется элементом матрицы S в соответствии с принятым порядком: s[1],[ 2] + s[ 2],[3] + …+ s[n1],[n] + s[ n],[1] . Оптимальным решением будет перестановка, минимизирующая эту сумму. Для некоторых пар i, j непосредственный переход от i к j может быть запрещен (если, например, отсутствует дуга (i,j)); в этом случае элемент sij матрицы S полагается равным бесконечности. И тогда в случае существования конечного решения задачи оптимальное решение не содержит дуги (i,j). На каждом шаге описываемого алгоритма задача включает n цветов краски, причем из n шагов перехода от одной краски к другой k могут быть уже установлены, и нужно выбрать оптимальным образом оставшиеся n-k. Для всех возможных переходов от одной краски к другой необходимо задать значение Y, представляющее собой нижнюю границу всех возможных решений задачи, включая и оптимальное. Таким образом, матрица характеризуется оставшимся числом (n-k) неизвестных шагов маршрута перехода от изготовления одной краски к другой и нижней границей Y решения задачи. Кроме того, можно считать, что для оставшегося множества шагов известно по крайней мере одно решение задачи (например, перестановка 1, 2, …, n есть решение), и пусть Z будет лучшее из них, причем сначала Z может быть бесконечным. Теперь матрица претерпевает дальнейшие изменения по следующему алгоритму: а) если n – k = 2, то осталось не более двух шагов маршрута и решение находится сразу. Если его значение меньше Z, то Z принимается равным этому новому значению и считается лучшим из известных решений. б) если Y больше или равно Z, то матрица исключается, так как представленные в ней маршруты хуже уже известных. в) если не происходит ни одно, ни второе, то вместо исходной матрицы составляются две. В одной из них выбирается переход от i к j, в результате чего нижняя граница может возрасти, в другой запрещается переход от n-k (элемент sij полагается равным ∞), в результате чего нижняя граница определенно возрастает. Таким образом, получаемые матрицы характеризуются возрастающей нижней границей и (или) большим числом установленных шагов. Кроме того, для каждой последующей матрицы число возможных траекторий меньше, чем для предыдущей и в конце концов достигается такое состояние, когда траектория определена полностью. Суть данного алгоритма (алгоритма Литтля) состоит в ветвлении, то есть понятиях приведения и выбора. Приведение преследует цель получения по меньшей мере по одному нулю в каждой строке и каждом столбце исходной матрицы S. Так как каждое решение задачи включает один и только один элемент из каждой строки или столбца матрицы S, то вычитание или добавление постоянной к каждому элементу ее столбца или строки в одинаковой степени изменяет все решение и не приводит к смещению оптимума. Отнимем постоянную h от каждого элемента строки или столбца матрицы S. Пусть получаемая в результате этого матрица будет ' S . Тогда оптимальное решение, найденное ' из S , оптимально и для S, т.е. для обеих матриц перестановка, минимизирующая маршрут, имеет один и тот же вид. В качестве нижней границы решений, получаемых из ' ' S , можно выбрать Y =h. Вычитание можно продолжать до тех пор, пока каждый столбец или строка не будут содержать по крайней мере одного нуля (т.е. до величины минимального элемента в каждой строке или каждом столбце). Сумма всех констант приведения определяет нижнюю границу Y для исходной задачи. Будем говорить, что матрица S является приведенной, если она не допускает дальнейшего приведения. В этом случае отыскание возможных вариантов маршрута связано в дальнейшем с изучением какого-либо перехода, скажем, из i в j. В результате вместо исходной матрицы рассматривают две: 1) матрицу S ij , связанную с отысканием лучшего из всех решений, даваемых матрицей S и включающих дугу (i,j). 2) матрицу S n (ij ) , связанную с выбором лучшего из всех решений, не включающих дугу (i,j). После того, как фиксирован переход из i в j (матрица S ij ), нужно исключить переходы от изготовления краски i к изготовлению всех других красок, кроме j, и переходы от изготовления краски j к изготовлению всех других красок, кроме i, полагая все элементы строки i и столбца j, за исключением sij , равными бесконечности. Нужно также запретить в последующем выбор дуги (j,i) полагая s ij =∞. Это вызвано тем, что изготовление всех видов краски при единственном изготовлении каждой из них внутри одного цикла и окончания этого цикла изготовлением краски первого цвета не может включать в себя одновременно дуг (i,j) и (j,i). Так как эти запрещения могут привести к устранению ряда нулей в матрице S, то не исключена возможность дальнейшего приведения S и в результате этого получения новой большей нижней границы для решений, связанных с матрицей S ij . В матрице S n ( ij ) запрещается переход из i в j, т.е. полагается s ij =∞. В этом случае также не исключена возможность дальнейшего приведения матрицы и вызванного этим возрастания нижней границы для решений, получаемых из S n (ij ) . Выбор дуги (i,j) должен быть таким, чтобы максимально увеличить нижнюю границу для S n ( ij ) , что, возможно, позволит исключить из рассмотрения ряд траекторий без дальнейшего ветвления. Чтобы достигнуть этого, просматриваются все возможные пары (i,j) в матрице S n (ij ) и выбор осуществляется таким образом, чтобы сумма двух последовательных приводящих констант была максимальной. Очевидно, что в первую очередь должны запрещаться дуги (i,j), которым соответствуют нулевые элементы матрицы S, поскольку выбор дуг с ненулевыми элементами не способствует дальнейшему приведению S n (ij ) . В качестве примера приведем задачу расчета длительности переналадки оборудования при производстве красок. Длительность очистки оборудования при переходе от изготовления одной краски к другой представлена а таблице 1. Необходимо найти последовательность производства красок, длительность которой была бы минимальна. Цикл начинается и заканчивается с изготовления краски одного и того же цвета. Внутри цикла изготавливаются краски разных цветов. Таблица 1. Предшествующий цвет Белый 0 3 6 2 15 20 Белый Желтый Красный Голубой Оранжевый Розовый Последующий цвет Красный Голубой 7 3 6 9 0 3 5 0 11 2 13 4 Желтый 1 0 14 3 7 5 Оранжевый 14 1 7 9 0 18 Розовый 2 24 3 11 4 0 Данная таблица аналогична следующей матрице: S= - 1 7 3 14 2 3 - 6 9 1 24 6 14 - 3 7 3 2 3 5 - 9 11 15 7 11 2 - 4 20 5 13 4 18 - Эта матрица может быть приведена к матрице S – (16) последовательным вычитанием из ее столбцов и строк минимальных элементов, общая сумма которых равна 16. Прочерки соответствуют запрещенным переходам. S-(16) = - 0 2 13 2 - 2 8 0 23 3 11 - 0 4 0 0 2 1 0 - 7 9 13 5 6 2 - 2 16 1 6 0 0 1 14 - 2 3 0 2 6 1 1 На первом шаге таблица представляет матрицу S-(16), где 16 означает, что любое решение исходной задач, получаемое по матрице S-(16) не может иметь значение, меньшее 16. Одно решение известно, так как последовательность 1-2-3-4-5-6 является возможным решением. Поэтому Z = 43. Степень нулевых элементов S-(16) означает сумму констант приведения, которая достигается запрещением соответствующего перехода. Максимальное их этих чисел равно 6 (для элемента s25 ). Дальнейшее преобразование таблицы связано с этим элементом. Таблица второго шага (Z = 43). 2 3 2 1 0 - - - - 0 - 3 S 25 -(16) = S n ( 25) -(22) = 11 - 0 - 0 0 3 1 0 - - 9 13 - 6 2 - 2 1 6 0 0 16 1 - - 0 3 1 - 0 3 2 9 1 0 - 0 6 - 21 3 11 - 0 0 0 0 1 0 - 3 9 13 5 6 0 - 2 16 1 6 0 10 - Следовательно, на втором шаге таблица содержит две матрицы: S 25 -(16) и (22). Отметим, что S S n ( 25) - приводится дальше с суммой констант приведения, равной 6 (4 n ( 25) по 5-м столбцу и 2 по второй строке), в результате чего нижняя граница возрастает до 22. В матрице S 25 элемент s25 подчеркнут для обозначения того, что он обязательно должен войти в решение. Остальные переходы по 2-ой строке и 5-му столбцу запрещены. Заметим, что переход, определяемый элементом s52 , также запрещен. Это обусловлено тем, что решение, получаемое из S , содержит элемент 25 s 25 , и оно не может содержать элемента s52 , иначе произойдет повторное производство одной и той же краски, прежде чем завершится цикл. В обоих вариантах, представленных в таблице, нижняя граница меньше Z, и для полного построения цикла остается найти более чем два шага. Кроме того, ни один из этих вариантов ни приводит к решению, ни может быть отвергнут. Поэтому каждый из них должен быть исследован дополнительно. Наиболее рациональным представляется исследование матрицы S 25 , поскольку она содержит то же самое число пройденных в процессе изготовления красок, но имеет меньшее значение Y. Здесь опять значение степени каждого нуля подсказывает направление поиска. Выбираем элемент s41 и получаем матрицы S 25, 41 -(19) и S 25,n ( 41) (19). Матрица S -(22) пока остается в том же виде, какой она имела на втором шаге. n ( 25) Таблица третьего шага (Z=43). S 25,41 -(19) = - 0 0 - - 1 - 11 - - 0 - - 0 - - 3 - 1 3 1 3 - 0 - - 2 0 0 - 2 0 0 1 3 - 1 0 - 2 - - 2 - 1 - 0 - 0 11 - - 1 10 13 10 S 25,n( 41) -(19) = 0 - 0 0 - - 9 - 6 2 - 2 1 6 0 0 1 - - 0 4 1 Отметим теперь, что на четвертом шаге в матрице S 25, 41 вычеркивается не только элемент s31 , но и s34 . Это вызвано необходимостью исключить цикл 4-1-3-4, поскольку переходы 4-1 и 1-3 уже включены в маршрут. Таблица четвертого шага (Z=43). S 25,41,13 -(20) = S 25, 41, n (13) -(22) = - 10 0 - - 0 - - - - - 0 10 - 0 - 0 11 1 0 0 - 0 - 12 0 - 2 0 - - 0 - 1 0 2 - 2 0 0 0 0 0 - Продолжая подобную процедуру дальше, на пятом шаге получим матрицу S 25,41,13,36 -(20), приводящую к решению задачи, поскольку остается установить только два перехода для завершения маршрута. Пять шагов должны определить минимум пять цветов, остается только один цвет и только одна возможность включить его в цикл, чтобы удовлетворить заданным условиям. Таблица пятого шага. S = -(20) 25, 41,13, 36 - 0 - 0 0 - 0 0 - - 0 - 0 - - - 0 - - - S 25, 41,13n ( 36) 0 - -(32) = 0 0 - 0 0 0 - 0 - В рассматриваемом случае пять шагов приводят к двум несвязанным друг с другом участкам маршрута 2-5 и 4-1-3-6. Соответствующий выбор элементов в последней матрице позволяет нам соединить эти участки в один маршрут. Такими элементами являются s54 и s62 (другой выбор просто отсутствует). Окончательный маршрут с длиной 20 имеет вид 6-2-5-4-1-3. Это новое значение Z=20 позволяет отвергнуть сразу три из оставшихся вариантов решения. В результате остается только вариант, содержащийся в матрице S 25,n ( 41) -(19). Здесь еще можно рассчитывать на получение решения со значением, меньшим 20. Преобразование этой матрицы по элементу матрицам S 25, n ( 41), 31 S 25, n ( 41), 31 -(20) и S -(20) и S 25, n ( 41), n ( 31) 25, n ( 41), ( 31) s 31 приводит к -(29). Однако варианты, содержащиеся в матрицах -(29), отвергаются, больше вариантов не остается, и задача решена. Таблица шестого шага. - S S 25, n ( 41), n ( 31) 25, n ( 41), n ( 31) -(20) = -(29) = 2 0 0 0 - 0 8 1 - - 0 3 2 - - - - 11 - 0 - 1 0 0 - 6 0 3 1 6 0 0 - 1 0 9 2 - 0 1 - 0 1 1 0 6 6 Результатом решения данной задачи является следующий цикл производства красок, при котором время переналадки оборудования при переходе от изготовления одной краски к другой минимально: Розовый – желтый – оранжевый – голубой – белый – красный - розовый. Процесс поиска вариантов решения удобно также представить и в форме дерева (рис.1). Каждый узел на рис.1 соответствует одному из вариантов, содержащихся в таблицах. Существует несколько стратегий выбора вариантов. Например, можно отдавать предпочтение вариантам с максимальным числом изготовленных красок. При этом на каждом шаге будет просматриваться незначительное количество вариантов. С другой стороны можно выбирать варианты с минимальной нижней границей. S-(16) S-(22) n(25) S-(16) 25 S-(19) 25 n(41) S-(29) 25 n(41) n(31) S-(19) 25 41 S-(20) 25 n(41) 31 S-(22) 25 41 n(13) S-(20) 25 41 13 S-(32) 25 41 13 n(36) S-(20) 25 41 13 36 Решение 6-2-5-4-1-3 Минимизируемое Значение = 20 Рисунок 1. При этой стратегии уменьшается число вариантов, приводящих к ветвлению. Какая из этих стратегий предпочтительнее, зависит от того, чем мы ограничены, объемом памяти или временем вычислений. Оптимизация процесса переналадок оборудования в условиях неопределенности Предыдущая задача о переналадках оборудования в условиях детерминированной матрицы T = ( t ij ) (i = 1, 2, …, n; j = 1, 2, …, n) не всегда может быть использована на практике, так как элементы матрицы T могут принимать различные числовые значения в зависимости от следующих факторов: квалификация персонала, время суток, в которое происходит настройка оборудования, климатические условия и т.д. В этих случаях необходимо оценить, каким образом локальное возмущение элементов матрицы T повлияет на оптимальность выбранной траектории (последовательности) переналадок оборудования на различные производственные операции. Иными словами рассмотрим следующую ситуацию. Пусть найдено оптимальное решение поставленной задачи TR опт среди множества всех элементов матрицы T, выделим некоторые ее подмножества T T, которое обладает тем свойством, что их значения могут увеличиться на величину ε>0. Таким образом, если * * t ij T , то его величина меняется в диапазоне от t ij до t ij + ε. Множество T назовем * множеством возмущаемых элементов. Определение. Будем говорить, что оптимальная траектория TR опт устойчива, если существует ε>0, обладающее тем свойством, что при увеличении значений возмущаемых элементов множества T * на любое 0< < ε траектория ' TR опт остается оптимальной. * Будем считать, что в множество T вошло k элементов (1 ≤ k ≤ n(n-1)). Рассмотрим ситуацию определения оптимальной траектории переналадок, если ε → ∞. Легко понять, что ассимптотический анализ этого процесса приведет к тому, что оптимальной траекторией в этом случае будет та, которая содержит минимальное число элементов из * множества T . Отсюда следует, что если TR опт - оптимальная траектория для невозмущенной матрицы T и она содержит минимальное число элементов из * множества T , k min по сравнению с другими траекториями TR i (i = 1, 2, …, N), то она будет оставаться оптимальной для любого ε(0, ∞). Действительно, продолжительность переналадок для траектории TR опт в случае возмущения ε (обозначим ее TR опт ( ) ) вычисляется следующим образом TRопт ( ) = TR опт + ε k min . С другой стороны, учитывая, что TR опт ( ) содержит минимальное число * элементов из T , очевидно следующее неравенство: TR опт Здесь ( ) ≤ TR i ( ) = TR i TR i +ε k , (i = 1, 2, …, N). i - продолжительность траектории переналадок i, k i - число элементов * из T в траектории i, N, - число возможных траекторий переналадок. В этом случае говорят, что решение TR опт абсолютно устойчиво. Рассмотрим более общую ситуацию. Пусть оптимальная траектория невозмущенной матрицы T содержит * TR опт * для k элементов из T . Рассмотрим кратчайшие траектории, содержащие k -1, k -2, …, k min элементов из T ( k min ≥0). Обозначим эти траектории соответственно TR , TR k , …, TR . Рассмотрим k - k min k * * * * * 1 уравнений относительно ε следующего вида: * TR опт + k ε = TR j + k j ε j= k * -1, k * -2, …, k min . * 2 k min (*) Обозначим решение каждого уравнения через j и выберем min j = l1 , k . Очевидно, что при изменении ε на интервале (0, ) оптимальной будет траектория TR . При ε > , оптимальной будет траектория TR . Если k = k , то траектория TR остается оптимальной для всех возмущений на интервале ( , ∞). Если k > k , то решаем уравнения (*) для j = k , k -1, k и далее выбираем min = и, следовательно, траектория TR будет оптимальна при возмущении элементов множества T на любое ε ( , ). Учитывая конечность числа траекторий TR , TR k ,…, TR через конечное число шагов получим, что начиная с некоторого j= k * -1, …, l1 min опт l1 l1 l1 l1 l1 min l1 l1 min l1 j min l2 l2 * l1 * 1 опт l2 k min ~ решение TR k min будет оптимальным при возмущении элементов T * на любую ~ величину ε ( , ∞). Таким образом доказано следующее утверждение. Утверждение 1. Пусть длительности переналадок заданы матрицей T и на * * множество возмущенных элементов T T продолжительности переналадок t ij T могут увеличиваться на любое ε (0, ∞). Тогда интервал увеличения длительности переналадок ε (0, ∞) может быть разбит на конечное число отрезков таким образом, что при возмущении продолжительности переналадок на любое число интервала ( j , j 1 ) (j=1, 2, …, ) оптимальной остается одна и та же траектория TR j Покажем, что достаточным условием устойчивости оптимальной траектории является ее единственность. Пусть TR опт - единственная оптимальная траектория и множество всех траекторий обозначим через . Вычислим по следующей формуле: = min (| TR l | - | TR опт |). l , l опт. Здесь | TR l | - продолжительность траектории l. Тогда достаточно выбрать в качестве ε величины ε = увеличении возмущенных элементов в TR ' ≤ +n опт TR опт = n TR +≤ опт TR ' l TR опт . Здесь на любое TR ' l . Действительно при n ' (0, ∞) получим длина траектории TR l при возмущении элементов множества T * на величину (0, ∞). Достаточное условие доказано. Выше нами была рассмотрена ситуация, когда продолжительности переналадок увеличивались на одну и ту же величину ε > 0 для всех элементов множества T * . На ' практике возможны случаи, когда для каждого элемента принимаемых значений t [ t ij , 1 ij t 2 ij t ij матрицы T задан диапазон ] (i=1, 2, …, n; j = 1, 2, …, n). В этом случае возникают следующие вопросы: 1. Сколько оптимальных траекторий существует при заданных интервальных значениях длительностей переналадок. 2. Если оптимальных траекторий более чем одна, то на каком множестве точек 1 2 гиперпараллелепипеда P = П [ t ij , t ij ] каждая траектория является i 1,, n оптимальной. Чтобы получить ответ на первый вопрос необходимо рассмотреть интервал 1 2 изменения продолжительности [ TR j , TR j ], j = 1, …, N. Эти интервалы могут быть получены при расчете траектории при значениях 1 2 1 2 длительностей переналадок t ij (получим значение TR j ) и t ij (получим значение TR j ). Далее определим множество траекторий, претендующих на оптимальность, которое обозначим ОРТ следующим образом. 1. Включим во множество ОРТ траекторию k, для которой выполняется 1 1 min TR j = TR k . j 1, N 2. Выберем среди траекторий min TR j 1, N TR j траекторию с минимальной правой границей 2 2 = TR l и включим траекторию TR l во множество ОРТ. j 3. Включим во множество ОРТ не траектории для которых выполняется 2 1 TR j < TRl , j = 1, 2, …, N, j k i , jl. Если во множество ОРТ вошла одна траектория, то она является оптимальной при 1 2 любых значениях t ij [ t ij , t ij ]; i=1, 2, …, n; j = 1, 2, …, n; ji. Если во множество ОРТ вошло m траекторий (1 < m < n), то множество, на котором могут меняться длительности переналадок для оптимальности каждой траектории TR p ОРТ задается следующим образом 1 2 t ≤ t ≤ t , i=1, n , j = 1, n , ij. t ≤ t , TR ОРТ. ij ij ij ij i , j k ij i , j TR k TR p Оптимизация процесса переналадок оборудования с учетом риска Рассмотрим ситуацию, когда время переналадки с операции i на операцию j задано как случайная величина с известным законом распределения 1 t ij - p 1 k 2 t ij t p p 2 i 1 i = 1, p ≥0. i … ij k t -p ij k . В этом случае математическое ожидание длительности переналадки выполняется k как t ij = t p l 1 l ij и дисперсия времени переналадки с операции i на операцию j l выполняется как ij = 2 2 k (t t ) p . l 1 l ij ij l Как отмечено, например, в [1] риск производственных потерь связанный с отклонением времени переналадок с операции i на операцию j от среднего значения может 2 количественно оцениваться дисперсией ij . Если же необходимо количественно оценить риск переналадок по всей траектории, то он может быть оценен следующим образом: R q = t ijTR q 2 ij +2 cov , pf l t p fTR q t l TR q pfl. Здесь k (t t )(t t ) p cov TR - некоторая траектория переналадок (q=1, 2, …, Q). Таким образом, pf l = m 1 m l m l pf pf m q в данном случае каждая траектория переналадок может быть оценена как с точки зрения ожидаемых затрат времени на переналадки, так и с точки зрения риска данной траектории, понимая под риском дисперсию продолжительности переналадок. В этом случае можно говорить об оптимальности траектории с учетом двух критериев: суммарная ожидаемая продолжительность переналадок для данной траектории и риск переналадок. Следуя теории Марковица, в этом случае при решении задачи об оптимальной траектории вначале определяется множество эффективных траекторий, а затем выбирается в качестве главного критерия один из указанных и решается однокритериальная оптимизационная задача с ограничением сверху по второму критерию. Например, можно формировать траекторию переналадок минимальной продолжительности, риск которой не превышает заданного значения, или траекторию минимального риска, продолжительность которой не более заданной величины. Рассмотрим метод решения первой из предложенных двухкритериальной задачи. (1) t ij min k 1, N i , jTR k ij t TR k pf l. Здесь t ij 2 ij +2 pf cov pf l l ≤ t TR k t TR k R rp . (2) - математическое ожидание длительности переналадки с операции i на операцию j. Для решения задачи (1) - (2) решим две оценочные оптимизационные задачи, первая из которых является задачей на минимум ожидаемой длительности переналадок и она может быть решена с использованием метода ветвей и границ, описание которого предложено в начале данной статьи. Вторая задача связана с нахождением траектории минимального риска, количественная оценка которого для траектории переналадок TR k задается левой частью неравенства (2). Для решения этой задачи также может быть использована схема метода ветвей и границ, в которой в качестве нижней оценки риска оптимальной траектории Rн можно взять 0, т.е. Rн =0. В качестве верхней оценки Rв выбрать некоторую допустимую траекторию и с учетом формулы (2) рассчитать риск этой траектории. Далее при формировании очередной допустимой траектории вычисляются текущая нижняя оценка по формуле: 2 2 pf н + 2 covl + (n-| T в |) min (T / T в ) Rтек (T в) = ij t ijT в t pfT в t l T в - (n(n-1)-| T k | * (| T k |-1) 2 min (T / T в ) max (T / T в ) 2 (3) Здесь использованы следующие обозначения: T – множество всех элементов матрицы переналадок; T в -множество элементов, которые вошли в формируемую траекторию переналадок; | T в | - число элементов в множестве T в ; 2 min 2 max 2 max Если (T / T в ) - минимальная дисперсия на множестве элементов T / T в ; (T / T в ) - максимальная дисперсия на множестве элементов T / T в . (T / T в ) - вторая по величине дисперсия на множестве элементов T / T в . н R (T тек в )≥ случае, то есть, если R , то R (T формирование траектории прерывается. В противном в н тек в ) < R в , то продолжим формировать траекторию переналадок и включаем в множество выбранных элементов матрицы Получим множество элементов н ~ T T в еще один. ~ в ( T в ≤ T в ) и для этого множества вычисляем величину ~ R (T ) , сравнивая ее далее с Rв . Продолжая эту процедуру получим с итоге два возможных варианта ее завершения: либо формируемая траектория будет отбракована, * либо будет сформирован новая траектория переналадок, риск которой R < Rв . В этом тек в * случае Rв присваивает значения R и мы переходим к анализу очередного варианта траектории переналадок по предложенной выше схеме. Метод завершает свою работу, когда все варианты формирования траекторий рассмотрены и выбирается тот из них, риск которого соответствует последнему (минимальному) значению T в . Эта траектория переналадок и будет траекторией минимального риска. После того как решены обе однокритериальные задачи, выясняем, совпадает ли решение для этих двух задач. Если они совпадают и риск оптимальной траектории не выше Rrp из ограничения (2), то задача (1) – (2) решена. Если решения двух указанных выше однокритериальных задач совпадают, то риск оптимальной траектории выше чем Rrp , то решение задачи (1) – (2) не существует. Если решения этих задач не совпадают и значение целевой функции на оптимальном решении в задаче на минимум риска не превосходит Rrp , то возможен следующий подход к решению задачи (1) – (2). В качестве нижней оценки T н для задачи (1) – (2) выбираем значение целевой функции в задаче на минимум ожидания длительности траектории переналадок. В качестве верхней оценки задачи (1) – (2) выбираем длительность той траектории, которая минимизирует риск. Далее может быть использована традиционная схема метода ветвей и границ, применяя для вычисления текущих нижних оценок риска формулу (3), которая при формировании траектории переналадок сравнивается с Rrp . Также происходит вычисление текущей нижней оценки по ожидаемой длительности траектории и если хотя бы одна текущая оценка больше соответствует верхней, то траектория отбраковывается. Если нет, то далее используется традиционный подход, связанный с улучшением верхней оценки. Литература. 1. Колвей Р.В., Максвелл В.Л., Миллер Л.В. Теория расписаний. М., Наука,1975. 2. Математические основы управления проектами // под ред. В.Н.Буркова , М., Наука, 2005. 3. Акиньшин В.М. Инвестиционный анализ. M., Дело, 2004.