АДАПТИВНЫЙ ГЕНЕТИЧЕСКИЙ Алгоритм ДЛЯ
реклама

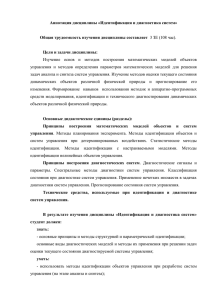
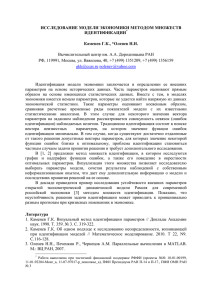
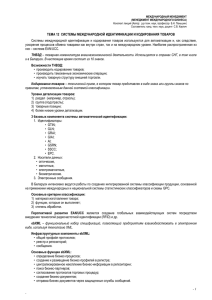
АДАПТИВНЫЙ ГЕНЕТИЧЕСКИЙ АЛГОРИТМ ДЛЯ ДИНАМИЧЕСКОЙ ИДЕНТИФИКАЦИИ СИСТЕМЫ Аль-Сабул Али Хуссейн Хасан Аспирант каф. АТМ, Тульский государственный университет Научный руководитель – Лукашин Олег Вячеславович В статье предлагается методика разработки генетических алгоритмов, которая сокращает общее время их сходимости. Результаты моделирования показывают, что предложенный подход значительно уменьшает количество поколений, необходимых генетическому алгоритму для нахождения приемлемого решения, в результате чего сокращается общее время оптимизации. Это дает возможность использовать данные алгоритмы в пространстве состояний динамической системы идентификации, которая включает в себя идентификацию неизвестных параметров. Ключевые слова: генетические алгоритмы, динамические идентификации, идентификации пространства состояния системы. системы Процесс получения (синтеза) математического описания объекта на основе экспериментально полученных сигналов на его входе и выходе называется идентификацией объекта. Идентификация может быть структурной, когда ищется структура математического описания объекта, или параметрической, когда для известной структуры находят величины параметров, входящих в уравнения модели. Построение математической модели реальной динамической системы возможно на основе результатов либо пассивного, либо активного эксперимента. Методы пассивной идентификации предполагают обработку информации, собранной путем наблюдения за входом и выходом объекта. Активные методы идентификации предполагают подачу на вход исследуемого объекта пробного тестирующего сигнала, синтез которого осуществляется на основе теории оптимального эксперимента, и обработку реализаций "входа-выхода". Генетические алгоритмы (ГА) в настоящее время представляют собой перспективное и динамично развивающееся направление интеллектуальной обработки данных, связанное с решением задач поиска и оптимизации [2 - 3]. Область применения генетических алгоритмов достаточно обширна. Они успешно используются для решения ряда больших и экономически значимых задач в бизнесе и инженерных разработках. Наряду с другими методами эволюционных вычислений генетические алгоритмы обычно используются для оценки значений непрерывных параметров моделей большой размерности, для решения комбинаторных задач, для оптимизации моделей, включающих одновременно непрерывные и дискретные параметры. Другая область их применения - использование в системах извлечения новых знаний из больших баз данных, создание и обучение стохастических сетей, обучение нейронных сетей, оценка параметров в задачах многомерного статистического анализа, получение исходных данных для работы других алгоритмов поиска и оптимизации. В данной работе предлагается быстрый ГА, в котором за счет наличия специальной элитной популяции удается значительно сократить время поиска приемлемых решений на отдельных шагах измерений, по сравнению с классическим ГА, что делает этот алгоритм удобным для использования в задачах реального времени. Поскольку в этом случае освобождается значительная часть интервала времени между текущими измерениями, она может быть использована для выполнения динамической идентификации исследуемой системы. Предлагаемый генетический алгоритм подробно описан в [1]. 1 Пример применения алгоритма. описываемую в пространстве состояний: x(k 1) Fx(k ) Gu(k ) w(k ) z (k 1) Hx (k 1) v(k ) , Рассмотрим динамическую систему, (1) (2) где x R n – вектор состояния, u U R p – вектор управления, z R m – вектор наблюдения, F R nn , G R n p и H R mn – матрицы состояния, управления и наблюдения, соответственно, k 1,..., N – дискретное время. x1 (k 1) 1 x (k 1) 2 2 1 x1 (k ) 3 u (k ) w(k ) 0 x 2 (k ) 0 (3) x (k 1) ~ z (k 1) 1 0 1 v(k ) x2 (k 1) (4) Процесс идентификации заключается в применении ГА для поиска лучших z (k 1) z (k 1) , где k 0,1,2,..... дискретное время; хромосом, так что ~ u (k ) sin( 2nf ) – известное входное воздействие f 5 герц и время выборки T 0.001 секунды, n kT ; z (k ) – измеряемый выход; – коэффициенты, подлежащие идентификации. Шум векторов v (k ) и w(k ) с нулевым средним и 0.1 0 E[v(i )vT ( j )] ij Q(i ); Q , 0 10 0.1 0 E[ w(i ) wT ( j )] ij R(i ); R ; 0 0.1 символ Кронекера, E[v(i) wT ( j )] 0 . Предположим также, что заданы истинные значения параметров: 1 1.988; 2 0.99; 1 2.238 и начальные значения переменных: z (0) 0; u (0) 0 . Зададимся следующими основными параметрами ГА: NIND=20; MAXELIT=20; 5 MAXGEN=100; 10 ; Pc 0.9 ; Pm 0.04 . В качестве функции приспособленности каждой хромосомы будем рассматривать квадратичную функцию следующего вида: (5) ei ( z ( k ) ~ z i (k )) 2 , i 1,2,...NIND; где i – номер хромосомы в поколении; Согласно предлагаемому алгоритму сгенерируем случайным образом первое ~ поколение NIND=20 хромосом, 1 при этом выбираем как случайное число, ~ ~ равномерно распределенное в диапазоне [0,3], 2 – в даипозоне [-2,0], а 3 – в даипозоне [0,4], в соответствии с правилом (1). Далее, согласно предлагаемому алгоритму, заполняем элитную популяцию хромосомами с наилучшей функцией приспособленности, вычисленной с использованием выражений (5), после чего проверяем критерий завершения оптимизации по элитной популяции. Если этот критерий не выполняется, то переходим к реализации классического ГА. В качестве алгоритма селекции поколения родителей был использован метод рулетки, основанный на линейном ранжировании [6]. При таком подходе все особи текущего поколения сначала упорядочиваются в соответствии со значением своей функции приспособленности путем присвоения им специального рейтинга, который рассчитывается по формуле [6]: i 1 (6) Rank i 2 SP 2.0 ( SP 1) ; i 1,2,....NIND, NIND 1 где i – номер особи в упорядоченном относительно функции приспособленности поколении (особь с наихудшей функцией приспособленности имеет номер i=1, а с наилучшей – i=NIND); SP – так называемый параметр «селективного давления», 2 выбираемый в диапазоне 1.0 SP 2.0 [6]. В нашем случае выберем этот параметр равным 2, тогда особь с наихудшей функцией приспособленности будет иметь рейтинг равный 0, а с наилучшей – равный 2. Далее родительские особи выбираются из текущего поколения путем «запуска рулетки» NIND раз. Однако, вероятность выбора соответствующей особи в этом случае будет пропорциональна рассчитанному ранее рейтингу, а не абсолютному значению функции приспособленности, как в классическом методе рулетки [6]. Далее с вероятностью Pc производится кроссовер по принципу «дискретной рекомбинации» [6], т.е. обмен соответствующими хромосомами поочередно между двумя расположенными по соседству родительскими особями. Наконец, последним шагом ГА является мутация, производимая с вероятностью Pm классическим для хромосом в виде наборов вещественных чисел способом [5 - 6], с дальнейшим случайным перемешиванием особей в новом поколении. На рис. 1 представлены результаты идентификации параметров F(1,1), F(1,2), и G(1) линейной динамической пространства состояние системы (1-2) с использованием предлагаемого ГА. Оценки параметров сходятся к истинным значениям после обработки примерно на (0.01-0.03) секунде измерений. (а) (б) (в) Рис. 1. Результаты идентификации параметров (a) - оценки параметра F(1,1), (б) - оценки параметра F(1,2), (в) - оценки параметра G(1) 3 Таким образом, предлагаемый быстрый ГА, как и предполагалось, с одной стороны, обеспечивает приемлемое качество идентификации неизвестных параметров. С другой стороны, за счет наличия специальной элитной популяции, позволяет существенно сократить время поиска приемлемого решения при обработке каждого измерения, включая классическую генетическую процедуру оптимизации функции потерь в ситуациях, когда ее значение превышает некоторый допустимый пороговый уровень. Список литературы 1. Аль-Сабул Али Хусейн Х., Грачев А.Н. Быстрый генетический алгоритм для приложений реального времени / Известия ТулГУ. Технические науки. Вып. 2., Тула: Изд-во ТулГУ, 2013. – с. 71-79. 2. Michalewicz Z. Genetic Algorithms + Data Structures = Evolution Programs. Springer-Verlag, Berlin Heidelberg New York, 1996. - 387 p. 3. Рутковская Д., Пилиньский М., Рутковский Л. Нейронные сети, генетические алгоритмы и нечеткие системы: Пер. с польск. И.Д. Рудинского. - М.: Горячая линия Телеком, 2006. - 452 c. 4. Haupt R.L., Haupt S.E. Practical Genetic Algorithms. John Wiley & Sons, Inc., Hoboken, New Jersey, 2004. - 253 p. 5. Панченко Т.В. Генетические алгоритмы: учебно-методическое пособие / Под ред. Ю.Ю. Тарасевича. – Астрахань: ИД «Астраханский университет», 2007. – 87 с. 6. Razali N.M., Geraghty J. Genetic Algorithm Performance with Different Selection Strategies in Solving TSP / Proceedings of the World Congress on Engineering, 2011, Vol. II, London, UK. – 6 p. 4