текущее состояние разработки имитатора походки человека
реклама

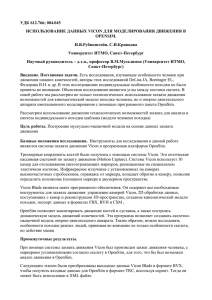
ТЕКУЩЕЕ СОСТОЯНИЕ РАЗРАБОТКИ ИМИТАТОРА ПОХОДКИ ЧЕЛОВЕКА И.П. Степанов, Ю.С. Монахов Университет ИТМО [email protected] Аннотация. В данном докладе рассматривается нынешнее состояние разработки имитатора походки человека на основе модели тазобедренного сустава человека. Данное устройство позволит создать базу данных видов походки человека, полезную при настройке и калибровке механотерапевтических устройств, а также создании новых реабилитационных систем, экзоскелетов и шагающих роботов. Система имеет широкие возможности для настройки по габаритам и жесткости, при сохранении относительно простоты. ÏÐÅÄÏÎÑÛËÊÈ Ходьба — автоматизированный двигательный акт, осуществляющийся в результате сложной координированной деятельности скелетных мышц туловища и конечностей. Отталкиваясь от почвы, нога приводит тело в движение — вперед и несколько вверх и вновь совершает размах в воздухе. [1] Ходьба человека напрямую связана с функционированием отделов опорно-двигательного и мышечного аппаратов, центральной и периферической нервной системами. При нарушениях в функционировании ЦНС могут возникнуть различные двигательные расстройства: шаркающая, семенящая походка, толчкообразные движения. Механотерапия является важной областью современной реабилитационной медицины. В ней используется множество аппаратов, различной степени сложности, которые предназначены для восстановления нормального функционирования опорно-двигательного аппарата человека. В частности, анализ ходьбы является способом диагностирования и оценки тяжести болезни Паркинсона, оценка производится по длительности шага, опорной и переносной фаз, одноопорного и двухопорного периодов. В том числе имеется обширный ряд устройств созданных для восстановления подвижности тазобедренного сустава. Ввиду этого рассматривается возможность создания модели-тренажера человеческой походки, благодаря которой можно было бы улучшить законы движения подобных систем. На ее основе возможно создание базы данных видов походки человека и сопутствующих ей данных. Имитатор походки человека предназначен для моделирования движений человека при разработке механотерапевтических реабилитационных устройств. Предлагаемый имитатор походки является развитием методов механотерапии, основоположником которой считается Густав Цандер. Он в середине 19 века разработал специальные аппараты, которые давали возможность точно дозировать движения и сопротивления на суставы. ÎÁÙÅÅ ÓÑÒÐÎÉÑÒÂÎ На данном этапе разработки имитатор походки предназначен для моделирования движения бедер и таза человека на основе траектории движения колен. Устройство механизма предполагает рассмотрение схемы по строению приближенной к тазобедренному суставу и осуществляющей движение, подобное походке человека. Получение данных с датчиков, установленных на системе, позволит получить законы движения максимально схожие с законами движения ног человека при ходьбе. Запатентованных аналогов данного устройства выявлено не было, однако существует несколько статей описывающих проектирование устройств, схожих с нашим по основной цели. Конструктивно первичная конструкция представляет собой механизм, имитирующий вертикальную проекцию сил, действующих при ходьбе человека. В ней, на условной тазовой кости, в имитирующие тазобедренный сустав блоки закреплены элементы, отображающие бедренную кость. При разработке изначально были приняты определенные допущения. Другие концы этих элементов присоединены к системе актюаторов. Эта система состоит из пар узлов осуществляющих, соответственно, перемещение по вертикальной и горизонтальной осям. Горизонтальное перемещение будет осуществляться при помощи ременной передачи, ввиду того, что это был наиболее оптимальный варниант для получения необходимого перемещения с необходимой скоростью. Вертикальное перемещение же, ввиду меньшей потребности в скорости планируется осуществлять при помощи пары винт-гайка. Движение актюаторов должно имитировать перемещение колена человека в процессе ходьбы. На рис. 1 изображена примерная схема устройства где: 1. Таз; 2. Осевое крепление; 3. Имитатор сустава; 4. Бедро; 5. Подвижное звено; 6. Ось 7. Коленное крепление 8.Блок актюаторов На весь комплекс предполагается установить систему датчиков, с которых будут сниматься данные о законе движения тела человека в этой области. Кроме того, за счет настройки обратной связи можно будет корректировать ошибки положения системы для наибольшего соответствия ее движения походке человека. Одним из основных преимуществ системы, видится ее модульное строение, позволяющее легко настраивать ее основные габариты, что позволяет моделировать походки людей с разными длинами ноги и шириной таза. Кроме того, благодаря этому в дальнейшем будет значительно проще дорабатывать и перестраивать систему, используя новые блоки и ограничения\допущения. Многие из элементов являются стандартными изделиями, для увеличения ремонтопригодности. Помимо настраиваемости по габаритам крайне важна предусмотренная система настройки жесткости в упруго-демпферном подвесе имитатора сустава. Ее планируется осуществлять при помощи системы концентрически расположенных пружин, в центре которой находится сферический шарнир. За счет увеличения или уменьшения растяжения пружин можно получать необходимую жесткость в нужном направлении. Один из видов исполнения системы представлен на рис. 2. Рис. 1 Ðèñ. 2. Ðàáîòà âûïîëíÿëàñü â ñîäåéñòâèè ñ ïðîôåññîðîì Ìóñàëèìîâûì Â.Ì. Ëèòåðàòóðà 1. Дубровский В.И., Федорова В.Н. Биомеханика. Учебник для ВУЗов. Москва: Владос-пресс, 2003. 545 Стр. 2. Inertial Measurement System for Human Gait Analysis // Korotkin D., Kuznetcov A. Proceedings of the 8th International Conference on Body Area Networks 2013/ Boston USA, p.414-419. 3. Zhigailov, S., Kuznetcov, A., Musalimov, V., Aryassov, G. Measurement and Analysis of Human Lower Limbs Movement Parameters during Walking. Solid State Phenomena 220-221. Mechatronics Systems and Materials YI, 2015, p. 538-543. ISSN 1662-9779 4. Иваницкий М. Ф. Анатомия человека: Учебник для высших учебных заведений физической культуры. М.: Олимпия, 2008. 5. Adkins H. V. Normal and pathological gait syllabus. Downey, Calif.: Professional Staff Association of Rancho Los Amigos Hospital, 1981 г. 6. Uustal H., Baerga E. Gait Analysis. New York : Demos Medical Publishing, 2004 г.