Фридман А.Я. Условия координируемости двухуровневого
реклама

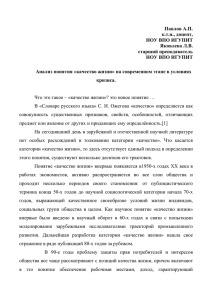
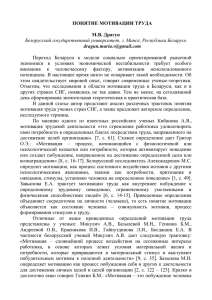
УСЛОВИЯ КООРДИНИРУЕМОСТИ ДВУХУРОВНЕВОГО КОЛЛЕКТИВА ДИНАМИЧЕСКИХ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ А.Я. Фридман Апатиты, ИИММ ТП КолНЦ РАН, [email protected] Аннотация Рассмотрена возможность реализации организационного взаимодействия коллектива динамических интеллектуальных систем. На примере двухуровневого коллектива получены необходимые условия координируемости по отношению к задаче координатора и по отношению к глобальной задаче на основе принципа прогнозирования взаимодействий. 1.Введение Динамическая интеллектуальная система (ДИС) [1] описывается как дискретная динамическая система D = < X, N, , >, (1) где: X - топологическое пространство состояний x X с отношением близости ; N – множество натуральных чисел, маркирующих дискретные моменты времени; - множество всех подмножеств множества X; : - функция замыкания, обладающая следующим свойством: если х , то х (х); (2) : N - функция, обладающая следующими свойствами: (x ,0) = x для любого x , ((x, t1), t2) = (x, t1+t2). (3) Динамика ДИС, основанной на правилах, которые содержат множества формул некоторого языка L, в марковском случае описывается следующим уравнением: x(t+1) = (((x(t) u(t) (t))), (4) где: u(t) U(t) U L - множество фактов, добавляемых в состояние x(t) (управлений); (t) (t) L - множество фактов, появляющихся в результате непрогнозируемых изменений окружающей ДИС среды (возмущений). Траектория (4) ДИС устойчива, если функция монотонна, а монотонна по переменной состояния [2]. В дальнейшем будем считать, что у любой упоминаемой ДИС эти условия выполнены. В работе [2] исследована возможность управления взаимодействием коллектива «одноранговых» ДИС, базы знаний которых одинаковы. Примером такого коллектива могут служить автомобили, участвующие в дорожном движении. Представляет интерес анализ иерархических систем, включающих ДИС в качестве компонентов различного уровня. Основы теории иерархических многоуровневых систем изложены в монографии [3]. Как и в этой работе, будем без потери общности рассматривать двухуровневую систему ДИС (рис.1) и для упрощения выкладок предположим, что все ДИС нижнего уровня однотипны, то есть имеют одинаковые базы знаний и множества X, U, . Такой коллектив может возникнуть, например, при решении какой-либо строительной задачи коллективом роботов (Di на рис.1, i I = {1,…n}), среди которых один выполняет функции координатора работ (D0 на рис.1). D0 1 n i x1 xi D1 u1 xn Di 1 ui Dn i un n Окружающая среда Рис.1. Двухуровневый коллектив ДИС. Согласно принципам децентрализованного управления [3], назначение координирующих сигналов i, поступающих от координатора к системам нижнего уровня, состоит в такой конкретизации условий решаемых ими задач, чтобы выдаваемые ими в окружающую среду управления ui одновременно обеспечивали достижение их собственных целей и решали задачу всей системы в целом. Соответственно, вводится два понятия координируемости систем нижнего уровня: координируемость по отношению к задаче координатора и координируемость по отношению к глобальной задаче. Существует несколько способов координации, наиболее подходящим для коллектива ДИС представляется способ прогнозирования взаимодействий. При реализации этого способа координатор сообщает подчиненным ему системам желательные для него значения сигналов взаимодействия между ними, а каждая из систем нижнего уровня пытается достичь заданного значения в предположении, что и остальные подчиненные системы будут действовать должным образом. 2. Координируемость относительно задачи координатора Интерпретируя способ прогнозирования взаимодействий для двухуровневого коллектива ДИС, положим, что на каждом этапе функционирования tj координатор сообщает системам Di их желательные состояния xi, которые должны быть достигнуты на этом этапе. Таким образом, на рис.1 следует положить i = xi. В качестве сигналов обратной связи от ДИС нижнего уровня к координатору использованы их состояния xi, как наиболее полный набор локальной информации. Тогда естественная формулировка условия координируемости по отношению к задаче координатора требует, чтобы каждая подчиненная ДИС могла достичь заданного состояния из своего текущего состояния xi. Очевидно, для этого необходимо существование плана достижения xi(tj) из xi(tj) [4], то есть существование последовательности управляющих воздействий на среду, которые позволят приблизиться к желаемому состоянию (в общем случае - при наличии возмущений). Ясно также, что в принципе различным Di может понадобиться различное время для достижения заданного состояния, поэтому можно предложить два подхода к организации взаимодействия нижестоящих систем во времени. Либо координатор должен формировать заданные состояния с учетом потенциальной возможности их достижения за один такт работы системы, тогда возможна синхронизация внутреннего времени всех ДИС. Либо в системе ДИС должно применяться планирование «по событиям», принятое при составлении сетевых графиков. Предпочтительность одного их отмеченных подходов определяется спецификой предметной области. Далее для простоты предполагается, что время координатора и всех Di синхронно и принадлежит множеству N. Возмущения в некоторой системе Di при координации способом прогнозирования взаимодействий будут возникать, если состояния остальных систем нижнего уровня будут отличаться от заданных координатором. Вид возмущений может быть детализирован только при условии конкретного описания решаемой коллективом ДИС задачи и окружающей среды, что не является целью настоящей работы. Однако с учетом (4) можно представить необходимое условие координируемости по отношению к задаче координатора как требование «максимального приближения» в конце шага управления состояний всех подчиненных ДИС к заданным состояниям: i(t) (t), xi(t+1) X, i I ui*(t) U(t): xi*(t+1) \ xi(t+1) xi(t+1) \ xi(t+1), (5) где: xi*(t+1) = (((xi(t) ui*(t) i(t))) – наилучшее возможное состояние ДИС Di в момент окончания шага управления; xi(t+1) = (((xi(t) ui(t) i(t))) – любое другое возможное состояние ДИС Di в этот момент. В работе [2] показано, что для стабилизации траектории ДИС, то есть компенсации влияния возмущений, достаточно применить управление u(x(t+1),t+1)) = ((x(t+1)),t+1)) \ (((((x(t) δ(t)),t)),t+1)). (6) С учетом (4) это соотношение можно интерпретировать как u(x(t+1),t+1)) = x(t+2/t+1)) \ x(t+2/t). (7) где: x(t+2/t+1)) - прогноз состояния x в момент времени t+2, сделанный в момент времени t+1 при отсутствии возмущений; x(t+2/t)) - прогноз состояния x в момент времени t+2, сделанный в момент времени t с учетом имеющихся в этот момент возмущений в предположении, что возмущений в момент t+1 не будет. Формулы (6), (7) позволяют учесть неизбежное запаздывание воздействия управлений из-за воздействия непрогнозируемых возмущений от среды [2]. С учетом (4) и (7) необходимое условие координируемости по отношению к задаче координатора (5) можно преобразовать к виду: i(t) (t), xi(t+1) X, i I ui*(t) U(t): xi*(t+2/t+1)) \ xi(t+2/t) xi(t+2/t+1)) \ xi(t+2/t). (8) 3. Координируемость относительно глобальной задачи Предположим вначале, что двухуровневая система ДИС является одноцелевой и ее цель – достижение заданного извне состояния координатора x0 X0. В упомянутом примере со строительством цель x0 может быть формализована в виде однозначного описания ожидаемого результата (например, чертежа здания). Тогда система будет координируема по отношению к задаче достижения x0, если координатор в момент времени t сумеет найти такой набор прогнозируемых значений xi X, i I, что после их выдачи подчиненным ДИС и последующего воздействия этих систем на среду состояние координатора приблизится к x0. Чтобы представить это утверждение более формально, рассмотрим подробнее задачу координатора. Возмущениями для координатора являются отклонения текущих состояний подчиненных ДИС от заданных им значений, управлениями – ожидаемые состояния ДИС нижнего уровня. Соответственно, уравнение состояния координатора после прихода сигналов обратной связи от подчиненных ДИС (принято, что имеет место запаздывание на один шаг в каждой ДИС и в реакции среды) можно представить в виде, аналогичном (4): x0(t+4) = 0(0(0(x0(t) u0(t) 0(t))), (9) где: 0(t): Xn 0 – функциональное отображение влияния отклонений текущих состояний подчиненных ДИС от заданных им значений на общее состояние работы; u0(t) – обобщенное описание прогнозируемого на следующий шаг состояния работы. Очевидное из (9) увеличение периода работы координатора по сравнению с периодом работы подчиненных ДИС вполне согласуется с теорией [3]. Из (9) следует, что координатор D0 должен решать две разнородные задачи: во-первых, оценивать текущий ход работы и на основе этой оценки вырабатывать стратегию дальнейшего решения задачи; во-вторых, распределять задания на следующий шаг между подчиненными ДИС. Поэтому структуру координатора целесообразно представить в виде, показанном на рис.2. x0 БОСС u10 un0 ui0 10 i0 БКД1 x1 x1 n0 БКДi xi БКДn xi xn xn Рис.2. Структура координатора. Здесь: БОСС – Блок Оценки текущего Состояния решения задачи и выработки Стратегии дальнейших действий, уравнение состояния которого описывается соотношением (9); БКДi – блоки коррекции действий, ответственные за отображение обобщенного описания прогнозируемого на следующий шаг состояния работы в прогнозные значения состояний каждой подчиненной ДИС Di и реализацию отображения 0(t). Тогда сформулированное выше утверждение о координируемости коллектива ДИС по отношению к глобальной задаче можно, по аналогии с (8), записать в виде: t N, xi(t) X, i I, x0 X0 xi*(t+4) X: x0*(t+4) \ x0 x0*(t) \ x0. (10) Если не выделять блоки контроля действий, то на вход координатора возмущения следует вводить в форме вектора с компонентами i0 = xi(t+1) \ xi(t+1), i I, (11) а на выходе D0 должны непосредственно вырабатываться xi. 4. Возможные обобщения задачи координации ДИС 1. Все изложенное исходит из предположения, что отношение близости над пространством состояний X позволяет только ранжировать состояния на основе соотношений типа (8), (10). Если можно определить числовую метрику над пространством состояний всех ДИС коллектива, то условия координируемости также можно представить в количественной форме. Например, в системе ситуационного моделирования (ССМ) [5] метрика имеет вид: 1/ s (s) ΦCCM 1 m a a s i0 :: i m Δ ai i 1 1/ s 1 m :: δai s m i 1 , (12) где: s - четное натуральное число; аi – сигналы из списка выходных параметров данного элемента модели; аi0 и аi > 0 - настроечные параметры, отражающие требования вышестоящего элемента к номинальному значению аi и допустимому отклонению аi от этого значения соответственно; ai :: ai ai 0 - относительное отклонение фактического значения ai ресурса аi от его номинального значения аi0. Из (12) следует, что в ССМ для координации также применяется способ прогнозирования взаимодействий. Если считать аi скалярными критериями качества работы элемента модели, номинальные значения которых определяются величинами аi0, то (12) представляет собой обобщенный критерий с коэффициентами важности, обратно пропорциональными допустимым отклонениям скалярных критериев. Его значение равно единице в том случае, если значения всех его аргументов находятся на грани допусков: (s) ΦCCM 1 , если | ai ai 0 | Δ ai , i 1, m , (13) и не превосходит единицы, если все аргументы находятся в пределах допусков. В таком случае можно искать условия координируемости коллективов ДИС аналогично идеям обеспечения устойчивости локального управления в коллективах автоматов [6], требуя положительности частных производных критерия типа (12) по входным параметрам соответствующего элемента коллектива. В случае ССМ условия нормировки (13) могут использоваться для определения моментов времени, когда требуется изменить задания подчиненным элементам системы. 2. Очевидна возможность построения иерархий ДИС для решения многоцелевых задач. Тогда целевое состояние координатора (x0 на рис.2) будет зависеть от времени и должно выбираться внутри системы с использованием отношения предпочтения на множестве целей [4]. Такие задачи могут возникать, например, при управлении структурой виртуальных предприятий [7]. Однако этот вопрос требует отдельного рассмотрения. Литература 1. Осипов Г.С. Динамика в системах, основанных на знаниях // Известия РАН. Теория и системы управления. М.: Наука, 1998, № 5. – С.24-28. 2. Осипов Г.С. Динамические интеллектуальные системы // Искусственный интеллект и принятие решений. – М.: URSS, 2008, № 1. – С.4754. 3. Месаpович М., Мако Д., Такахаpа И. Теория иерархических многоуровневых систем. - М.: Мир, 1973. - 344 с. 4. Виноградов А.Н., Жилякова Л.Ю., Осипов Г.С. Динамические интеллектуальные системы. Ч.II. Моделирование целенаправленного поведения // Известия РАН. Теория и системы управления. – М.: Наука, 2003, №1. - С.8794. 5. Фридман А.Я. Ситуационный подход к моделированию промышленноприродных комплексов и управлению их структурой. Труды IV международной конференции "Идентификация систем и задачи управления" (Москва, 25-28 января 2005 г.). – М.: Институт проблем управления им. В.А. Трапезникова, 2005 г. - С.1075-1108. 6. Стефанюк В.Л. Локальная организация интеллектуальных систем. – М.: Физматлит, 2004. – 328 с. 7. B.Sokolov, A.Fridman. Integrated Situational Modelling of Industry-Business Processes for Every Stage of Their Life Cycle // Proceedings of IEEE International Conference on Intelligent Systems (IS 2008), Varna, Bulgaria, September 6-8, 2008 (в печати).