УДК 681
advertisement

УДК 681.513.6:681.587.3
О. Э. Якупов
(Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»)
Адаптивный электрогидравлический следящий привод
летательного аппарата
Рассмотрен электрогидравлический следящий привод с непосредственным
управлением, также перечислены его основные недостатки, влияние которых на
динамические характеристики привода предлагается устранять при помощи
адаптивного управления.
Введение
Системы управления современных самолетов, как правило, базируются на
электрогидравлических следящих приводах (ЭГСП). Наряду со своими
многочисленными достоинствами по отношению к другим типам приводов,
которые и явились основной причиной их широкого распространения в сфере
управления летательными аппаратами, электрогидравлические приводы (ЭГП)
обладают также некоторыми недостатками. К таким можно отнести
существенную
нелинейность
и
нестационарность
характеристик
электромеханических и гидравлических узлов привода.
Воздействие данных неблагоприятных факторов на характеристики ЭГП
может привести к возникновению в системе управления автоколебательных
процессов, особенно в области малых сигналов задания. На уровне управления
самолетом такое явление способно повлечь за собой потерю им устойчивости в
малом, что, очевидно, должно быть исключено выбором соответствующей
системы управления гидроприводом.
Следует также отметить, что повышение чувствительности и
стабилизации характеристик ЭГСП в области малых сигналов управления не
всегда может быть достигнуто путем прямого увеличения добротности контура
сервопривода (внутренний контур гидропривода) и привода в целом, так как это
может привести к недопустимым колебательным процессам и в конечном итоге
значительному снижению рабочих ресурсов привода.
Задача компенсации влияния указанных неблагоприятных факторов на
основные показатели системы управления может быть решена при помощи
механизма адаптивного управления.
1.
Электрогидравлический следящий привод с непосредственным
управлением
1.1. Общие сведения
Для управления рулевыми поверхностями самолетов применяют мощные
электрогидравлические приводы, включающие в себя несколько каскадов
гидравлического усиления: двух- и трехкаскадные электрогидроприводы.
Первый каскад, как правило, является звеном сопряжения электрического
тракта привода с его гидравлической частью. К настоящему времени
распространение получила следующая схема построения первого каскада
гидроусиления.
Электрический сигнал управления с выхода усилителя мощности
поступает на вход электромеханического преобразователя, который
преобразует электрическую энергию управления в механическое перемещение
якоря
преобразователя.
Якорь
жестко
связан
с
маломощным
гидрораспределителем того или иного типа, например типа сопло-заслонка.
Данный гидрораспределитель, в свою очередь, управляет расходом рабочей
жидкости и, соответственно, приводит в движение гидрораспределитель
следующего каскада усиления.
Все преимущества гидроприводов по сравнению с электроприводами
проявляют себя в большей степени в том случае, если от привода требуется
значительная выходная мощность. Вместе с тем, в многокаскадных приводах в
качестве первых каскадов обязательно присутствуют маломощные
гидравлические усилители. С конструктивной точки зрения гидравлические
системы по сравнению с электромеханическими имеют более сложное
строение, а также требуют более жестких технологических норм изготовления.
Одним из вариантов решения данной задачи явилась идея замены маломощной
гидравлической части ЭГП электрическим линейным двигателем (ЛЭД). Такие
ЭГП получили название электрогидравлические приводы с непосредственным
управлением или ЭГП с ЛЭД.
Такое конструктивное решение позволило добиться следующих
результатов: улучшения энергетических характеристик гидропривода за счет
снижения уровня утечек рабочей жидкости, возможности работы на
переменном давлении гидропитания, упрощения схемы агрегата, повышения
отказоустойчивости, компактности гидропривода, уменьшения массы агрегата,
унификации компонентов гидропривода.
1.2. Основные факторы, влияющие на динамические и статические
характеристики электрогидравлического привода с
непосредственным управлением
На динамические и статические характеристики ЭГП значительное
воздействие оказывают нелинейные и нестационарные характеристики
отдельных элементов привода.
Нестационарность характеристик гидропривода вызвана, главным
образом, изменением температуры и давления нагнетания рабочей жидкости, а
также изменением числа резервированных каналов управления. В данной
работе для учета внешних воздействий в виде изменений температуры и
давления гидропитания принято, что крутизна расходной характеристики
золотникового гидрораспределителя изменяется на 20%. Отказ одного
электронного канала резервного управления эквивалентен уменьшению
коэффициента передачи прямого тракта управления сервопривода на 30%.
Основная нелинейная характеристика ЭГП порождена физическими
принципами его работы, а также особенностями его конструкции: расход
рабочей
жидкости
через
дроссельные
отверстия
золотникового
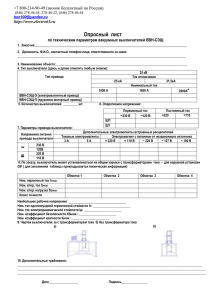
гидрораспределителя нелинейно связан с перемещением золотника. Характер
зависимости расхода рабочей жидкости от перемещения золотника (расходная
характеристика) гидрораспределителя одного из каскадов рассматриваемого
гидропривода отображен на рис. 1. Особенность расходной характеристики
заключается в том, что коэффициент наклона (крутизна) этой характеристики
зависит от величины перемещения золотника. Так, значение крутизны
расходной характеристики при малых перемещениях золотника (порядка 2–4%
от максимально возможного XЗГР MAX) может отличаться в 1.5–2 и более раз по
отношению к значению при работе в области больших перемещений (более 10–
15%XЗГР MAX). На рис. 1 пунктирными линиями обозначена область возможных
изменений расходной характеристики в зависимости от изменений температуры
и давления нагнетания рабочей жидкости.
Помимо рассмотренной, нелинейной
VГЦ1, мм/с
является также статическая характеристика
ЛЭД, которая содержит зону
30
нечувствительности IЛЭД 1%IЛЭД MAX, где
IЛЭД – управляющий ток.
20
kQx2
Таким образом, электрогидравлический
10
привод
можно
охарактеризовать
как
kQx1
xЛЭД, мм
существенно нелинейный и нестационарный
0
0.02 0.04 0.06
объект
управления.
Динамические
характеристики привода зависят как от
уровней управляющих сигналов, так и от
Рис. 1.
условий его функционирования.
1.3. Математическая модель электрогидравлического следящего
привода с непосредственным управлением
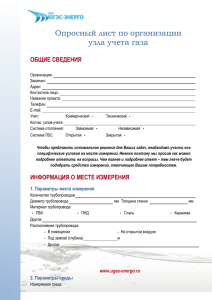
Математическая модель рассматриваемого ЭГСП, учитывающая
нелинейные и нестационарные дестабилизирующие факторы, пригодная для
синтеза адаптивного управления и анализа его эффективности, представлена на
рис. 2.
СЕРВОПРИВОД
1
TOC p 1
kЛЭД(I)
U
kП
kС
1
TКТ p 1
1
TЛЭД p 1
XРМ
kQx1(x)
Y
kQx2(x)
1
p
1
p
Рис. 2
Приняты следующие обозначения: kП, kС – коэффициенты передачи
пропорциональных регуляторов положения и скорости, соответственно; TКТ,
TЛЭД – постоянные времени контура тока и ЛЭД; kQx1, kQx2 – расходные
характеристики; kЛЭД – статическая характеристика ЛЭД; TОС – постоянная
времени датчика обратной связи сервопривода; U – задающее воздействие; XРМ,
Y – выходные координаты сервопривода и привода.
Для оценки эффективности работы средств коррекции нелинейных и
нестационарных характеристик ЭГСП в работе приняты следующие условия
исследования:
1) изменение коэффициента kС (изменение температуры, давления
нагнетания и числа резервных каналов) в пределах: kС = {2kС ном … 0.25kС
ном};
2) изменение постоянной времени ЛЭД: TЛЭД = {2TЛЭД ном … 0.5TЛЭД ном };
3) изменение крутизны расходной характеристики (изменение температуры
и давления нагнетания) kQx2 = kQx2 ном 30%kQx2 ном.
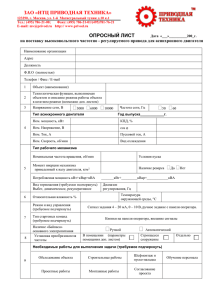
Представление о динамических и статических характеристиках ЭГСП без
адаптивного регулятора при различных значениях задающего воздействия
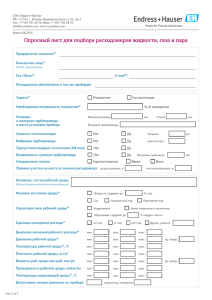
(U = 3, 0.1 В) дают переходные (рис. 3 и 4) и частотные (рис. 5 и 6)
характеристики.
На рис. 3 и 4 кривые 1, 2 и 3 соответствуют значениям параметра
kС = kС ном, 2kС ном, 0.25kС ном, рис. 5 – семейство частотных характеристик при
kС = kС ном, 2kС ном, 0.25kС ном, рис. 6 – семейство частотных характеристик при
kQx2 = kQx2 ном, 0.7kQx2 ном, 1.3kQx2 ном.
Y, мм
Y, мм
3
0.1
1
2
3
2
1
0
0.1
0.2
Рис. 3
1
2
0.05
3
0
0.3
t, с
0.1
0.2
Рис. 4
0.3
t, с
Статические ошибки при отработке малых сигналов задания (U = 0.1 В)
обусловлены наличием в контуре сервопривода зоны нечувствительности. Здесь
следует обратить внимание на то, что при U = 0.1 В и kС = 0.25kС ном (кривая 3
рис. 4) выходной сигнал привода отсутствует.
L, дБ
0
-5
100
, град.
0
101
ω, рад/с
101
ω, рад/с
-50
-100
100
Рис. 5
L, дБ
0
-5
-10
100
, град.
0
101
ω, рад/с
101
ω, рад/с
-50
-100
100
Рис. 6
Частотные характеристики (рис. 5 и 6) дают общее представление о
характере изменений свойств системы при воздействии на нее различных
возмущающих факторов: наблюдается их существенное отличие друг от друга
как по форме, так и по значению полосы пропускания.
Анализ приведенных переходных и частотных характеристик позволяет
говорить о существенном влиянии нелинейностей и нестационарностей на
основные показатели качества ЭГСП.
2.
Адаптивный электрогидравлический следящий привод
С целью снижения воздействия рассмотренных выше возмущающих
факторов на динамические и статические характеристики ЭГСП в его контур
управления вводится адаптивный регулятор (АР).
В работе рассмотрены две схемы построения адаптивных систем на базе
сигнальной адаптации [1]:
1) адаптивная система с настраиваемой моделью (НМ);
2) адаптивная система с эталонной моделью (ЭМ).
Достоинства выбранных алгоритмов управления, примеры построения
адаптивных систем и условия их применения, а также доказательства их
устойчивости можно найти в работах [1-5].
1.1.
Адаптивная система с настраиваемой моделью
Построение адаптивного регулятора производится по следующим
уравнениям.
1. Уравнения объекта управления:
(1)
x(t ) A(t, x) x(t ) B(t,x) u(t ) ,
y(t ) C x(t ) ,
u(t ) g(t ) (t ) ,
где x(t) – вектор состояния объекта управления; y(t) – вектор выходов; g(t), (t)
– соответственно сигнал задания и адаптивный сигнал; A(x,t) и B(x,t) –
соответственно нелинейные и нестационарные матрицы состояния и
управления.
2. Уравнения настраиваемой модели:
(2)
x (t ) A0 G C x(t ) B0 u~(t ) ,
u~(t ) u(t ) z(t ) ,
x (t ) – вектор состояния настраиваемой модели; A0, B0 – линейные
где
стационарные матрицы состояния и управления настраиваемой модели; G –
некоторая постоянная матрица, если матрица A0 выбрана неустойчивой, то
соответствующим выбором G можно обеспечить устойчивость НМ.
3. Уравнения адаптивного регулятора:
(t)
1
(t) z( t) ,
Tf
(3)
z (t ) h sign B0T Pe(t) ,
e(t) x(t) ~
x (t) ,
(4)
(5)
где Tf –постоянная времени фильтра (5); h = const > 0; P – матрица, является
решением матричного уравнения Ляпунова: A0T P PA0 Q , где Q –
произвольная положительно определенная матрица.
На основе уравнений (1) – (5) и модели ЭГСП (рис. 2) получаем
адаптивный ЭГСП с НМ (рис. 7).
k (x)
В адаптивной системе (рис. 7)
g
x
Y
1
k
Сервопривод
настраиваемая модель определена в
p
АР
μ
виде звена второго порядка. По
p
z
1
сравнению с уравнением (2) в
h
p
T p 1
предлагаемой адаптивной схеме
~
~
НМ
x
x
k
k
есть ряд особенностей, а именно,
T p 1
p
матрица G выбрана нулевой и
модель подстраивается только за
Рис. 7
счет сигнала z. Адаптивный сигнал
формируется при помощи сигналов с выходов датчиков положения
сервопривода xРМ и привода Y, а также переменных состояния настраиваемой
модели ~x1 и ~x2 . Коэффициенты p1 и p2 являются результатом вычисления B0T P
из (6). Постоянная времени фильтра Tf и коэффициент h подбираются
экспериментальным путем при моделировании.
Результаты работы адаптивной системы с настраиваемой моделью
приведены на рис. 8 – 10. Условия, при которых были сняты данные
характеристики, представлены в табл. 1.
Таблица 1
Рисунок
Условия исследования
9
kС: kС ном, 2kС ном, 0.25kС ном; U = 0.1, 3 В
10
kQx2: kQx2 ном, 0.7kQx2 ном, 1.3kQx2 ном; U = 0.1, 3 В
11
TЛЭД: TЛЭД ном, 2TЛЭД ном, 0.5TЛЭД ном; U = 0.1, 3 В
Qx2
РМ
П
1
2
f
М1
М1
2
1
М2
L, дБ
0
1
-5
, град.10
0
0
ω, рад/с
101
-50
-100
1
100
101
ω, рад/с
101
ω, рад/с
101
ω, рад/с
0
, град.10
0
-20
-40
-60
101
ω, рад/с
100
101
ω, рад/с
Рис. 8
L, дБ
0
-2
-4
-6
0
, град.10
0
-50
100
Рис. 9
L, дБ
0
-2
-4
Рис. 10
Основываясь на представленных частотных характеристиках и не
принимая во внимание их отличия по отношению к статическим ошибкам
можно сделать вывод, что в целом адаптивный ЭГСП с НМ снижает
воздействие на него параметрических и нелинейных возмущающих факторов: в
основной полосе пропускания частотные характеристики привода подобны.
Помимо этого, следует отметить, что представленная адаптивная система
уменьшает также и уровень статической ошибки в 3–4 раза и увеличивает
чувствительность системы управления в области малых сигналов задания. На
рис. 8 кривая 1 соответствует условиям U = 0.1 В и kС = 0.25kС ном, тогда как в
системе без адаптивного регулятора (кривая 3 рис. 4) при таких же условиях
работы привода выходной сигнал отсутствует.
Адаптивная система с эталонной моделью
1.2.
В параграфе 2.1. был рассмотрен адаптивный регулятор, рассчитанный
для всего ЭГСП, с подстройкой от двух переменных состояния: сигналов
датчиков положения сервопривода и привода. В этой адаптивной системе в
настраиваемой модели динамические характеристики контура сервопривода
были представлены апериодическим звеном. Однако реально в его динамике
присутствуют ярко выраженные составляющие высших порядков, т.е. модель
сервопривода должна была быть задана, как минимум, звеном второго порядка.
Соответственно, при формировании адаптивного сигнала мы должны были бы
учитывать полный вектор состояния объекта управления.
Главная особенность адаптивной системы с НМ заключается в ее
определенной грубости, по сравнению со схемой с ЭМ, к неучтенным
динамическим характеристикам объекта управления [1,2], что и дало
возможность упростить структуру адаптивного регулятора.
С тем, чтобы не усложнять структуру адаптивной системы с ЭМ за счет
учета дополнительной динамики сервопривода, а также принимая во внимание
тот факт, что перечисленные выше возмущающие воздействия, главным
образом, сосредоточены в контуре сервопривода, то предлагается и адаптивный
регулятор перенести в контур сервопривода.
Структура адаптивного регулятора задается следующими уравнениями.
1. Пусть объект управления описывается уравнениями, аналогичными (1).
2. Уравнение эталонной модели:
(6)
x М (t ) A0 x М (t ) B0 g (t ) ,
где x М (t ) – вектор состояния эталонной модели; A0, B0 – линейные
стационарные матрицы состояния и управления настраиваемой модели.
3. Закон адаптивного управления в виде:
(7)
(t ) h sign B0T Pe(t) ,
(8)
e(t) x(t) x М (t) .
Таким
образом,
в
k (x)
U
x
Y
g
соответствии
с
уравнениями
(1),
(6)
1
k
Сервопривод
p
– (8), а также на основе модели
АР
рис. 3 получаем адаптивный ЭГСП
p
μ
Td p 1
с ЭМ (рис. 11). В адаптивной
h
p
системе (рис. 11) ЭМ сервопривода
p
представлена
звеном
второго
ЭМ
порядка.
Адаптивный
сигнал
x
x
1
kМ
p
формируется
при
помощи
TЛЭД p 1
переменных состояния эталонной
модели xМ1, xМ2, выходного сигнала
Рис. 11
с датчика сервопривода xРМ и его
производной. Производную от сигнала xРМ получаем при помощи реального
дифференциатора с постоянной времени Td.
Частотные характеристики полученной адаптивной системы (контура
сервопривода) представлены на рис 12, на рис. 13 – характеристики
РМ
Qx2
П
1
2
М2
М1
сервопривода без АР. Условия, при которых были сняты данные
характеристики: U = 0.3, 6 В; kС: kС ном, 2kС ном, 0.25kС ном; TЛЭД: TЛЭД ном, 2TЛЭД ном,
0.5TЛЭД ном.
L, дБ
0
-20
-40
100
, град.
0
-50
-100
-150
101
102
ω, рад/с
100
101
102
ω, рад/с
Рис. 12
L, дБ
0
-1
1
-2
0
ω, рад/с
101
, град.10
0
-20
-40
-60
1
100
101
ω, рад/с
Рис. 13
В случае с приведенной адаптивной системой с ЭМ также наблюдается
уменьшение последствий действия возмущений в виде изменений параметров
системы и нелинейности ее характеристик. В основной полосе пропускания
частотные характеристики гидропривода имеют близкие показатели, отличаясь
только статическими ошибками. В сравнении с системой с НМ уменьшение
уровня статической ошибки в системе с ЭМ происходит в 4–5 раз. Кривая 1 рис.
13, так же как и в случае частотных характеристик с НМ, соответствует режиму
работы сервопривода в области малых сигналов задания и при низкой
добротности его контура.
Заключение
Полученные результаты свидетельствуют об эффективности применения
адаптивных средств коррекции для придания системе управления некоторых
свойств нечувствительности по отношению к параметрическим и нелинейным
возмущающим воздействиям.
Адаптивная система не только дает возможность выдержать в заданных
пределах динамические характеристики системы, но и позволяет уменьшить
статические ошибки, вызванные наличием зоны нечувствительности в контуре
управления, повышая чувствительность привода в области малых сигналов
задания.
Адаптивная система с эталонной моделью, как правило, требует
достаточно близкого совпадения структуры объекта управления и эталонной
модели, в то время как схема с настраиваемой моделью обладает определенной
грубостью по отношению к неучтенной динамике. Вместе с тем, адаптивный
регулятор с настраиваемой моделью обладает относительно более сложной
структурой по сравнению со схемой с эталонной моделью, что необходимо
учитывать при его реализации.
Литература
1. Борцов Ю. А., Поляхов Н. Д., Путов В. В. Электромеханические системы с
адаптивным и модальным управлением. Л.: Энергоатомиздат, 1984
2. Борцов Ю. А., Соколовский Г. Г. Автоматизированный электропривод с
упругими связями. СПб.: Энергоатомиздат, 1992
3. Борцов Ю. А., Поляхов Н. Д., Путов В. В. Адаптивное автоматическое
управление электромеханическими системами // Электричество, 1982, №7
4. Адаптивное управление электрогидравлическими следящими приводами /
Ю.А. Борцов, В.Е. Кузнецов, С.В. Гаврилов, В.Б. Второв, Н.Д. Поляхов, О.Э.
Якупов // Приводная техника, 2000, №6
5. Борцов Ю. А., Бурмистров А. А. Адаптивный электрогидравлический
следящий привод // Электротехника, 1996, №3