1 Лекция №3 «Динамика материальной точки» План Первый
реклама

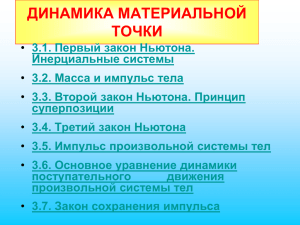
1 Лекция №3 «Динамика материальной точки» План 1. 2. 3. 4. 5. Первый закон Ньютона. Масса. Сила. Второй и третий законы Ньютона. Импульс. Закон сохранения импульса. Центр масс. Движение центра масс. Момент силы. 1. Динамика – это раздел механики рассматривающий причины вызывающие те или иные перемещения. В основе динамики лежат законы Ньютона. Первый закон Ньютона: Существуют такие системы отсчета, относительно которых (●) или тело сохраняет состояние покоя или равномерно прямолинейного движения, пока внешние воздействия не выведут ее из этого состояния. Способность тела сохранять состояние покоя или равномерного прямолинейного движения называется инерцией. И первый закон Ньютона называется законом инерции (споткнуться, поскользнуться). Закон инерции выполняется в инерциальных системах отсчета. С большой достоверностью к инерциальным системам отсчета можно отнести Землю и любое тело покоящиеся или движущиеся равномерно и прямолинейно относительно Земли. Масса. Различные тела под действием одинаковых сил, приобретают различные ускорения т.е. обладают различной инертностью. Масса характеризует инертные свойства тел. Инертность – способность тела приобретать ускорение. Масса m [кг ] - основная единица СИ. Масса величина аддитивная – это значит, что если тело состоит из n m1 , m2 , m3 , ...mn , то m mi . i 1 m m0 1 2 , . с Масса величина постоянная, если тело покоится. Если оно движется со скоростью соизмеримой со скоростью света c 3 10 8 м / с , то m m0 1 2 , где m0 – масса покоящегося тела, β = υ/с. Сила. Сила – это физическая величина, характеризующая взаимодействия тел, в результате которого происходит изменение скорости, тела приобретают ускорение или происходит деформация тел. 2 Сила F [H ] - Ньютон. F ma [1H кг м ] с2 1Н – это сила сообщающая телу массой 1кг ускорение 1 м . с2 2. Второй закон Ньютона Второй закон Ньютона устанавливает зависимость между силой, массой и ускорением. a F рав m ; F рав ma - второй закон Ньютона. (1) Ускорение приобретенное телом прямо пропорционально равнодействующей всех сил, приложенных к телу и обратно пропорционально массе. Известно, что a d подставим значение a во второй закон Ньютона: dt md d (m ) ; P m - импульс, то импульс равен произведению dt dt кг м ] . Направление импульса совпадает с направлемассы на скорость. P [ с dP нием скорости F - второй закон Ньютона. dt F рав Третий закон Ньютона. Еще раз подчеркиваем, что взаимодействия всегда происходят между телами. Силы с которыми взаимодействуют тела всегда равны по величине и противоположны по направлению F1 F2 . Значит эти силы не когда не компенсируют друг друга, потому что приложены к разным телам (стоит человек, ходьба). Выражая силу через второй закон Ньютона третий закон можно переписать m1a1 m2 a2 . 3. Закон сохранения импульса. Прежде чем выводить закон сохранения импульса ознакомимся с некоторыми понятиями: Механическая система – совокупность материальных точек и тел рассматриваемых как единое целое. Внутренние силы – силы взаимодействия между материальными точками системы. Внешние силы – силы с которыми внешние тела действуют на материальные точки системы. Замкнутая система – система которая не взаимодействует с внешними силами (внутренние силы во много раз превосходят внешние силы). 3 Пусть дана замкнутая механическая система состоящая из n матери альных точек массами m1 , m2 , m3 , ...mn обладающих скоростями 1 , 2 , .... n . F равнодействующая внешних сил. F - равнодействующая внутренних сил. Запишем второй закон Ньютона для каждой точки системы, через импульс d m11 F1 F1 dt d m2 2 F2 F2 dt ……………… d mn n Fn Fn Сложим почленно все уравнения и получим: dt d m F1 F1 F2 F2 ... Fn Fn ; dt Система замкнутая, следовательно действие внешних сил равно нулю F1 F2 ... Fn 0 ; материальные точки внутри системы по третьему закону Ньютона взаимодействуют между собой, с силами равными по величине и противоположные по направлению т.е. геометрическая сумма всех внутренних сил F1 F2 ... Fn 0 . И второй закон Ньютона для замкнутой системы запишется d m dP 0; 0 ; P const ; m const - закон сохранения импульса. dt dt В изолированной замкнутой системе сумма импульсов есть величина постоянная. Это фундаментальный закон Ньютонской механики. 4. Пусть дана замкнутая система состоящая из n материальных точек масn сами m1 , m2 , m3 , ...mn , то общая масса этой системы равна m mi . i 1 Центром масс системы называется воображаемая точка, положение которой, характеризует распределение масс этой системы. У тел правильной геометрической формы, центр масс совпадает с геометрическим центром. Положение центра масс любого тела определяется радиус вектором: r m1r1 m2 r2 ... mn rn . m1 m2 ... mn Центр масс является важнейшей характеристикой для определения движения тела. Особую роль он играет, в так называемых твердых телах, в которых расстояние между точками тела не меняется за время движения тела. Для определения скорости движения центра масс определим производную от радиус вектора центра масс по времени: dr dr dr m1 1 m2 2 ... mn n dr dt dt dt m11 m2 2 ... mn n . ñ c dt m m 4 Т. к. производная массы точки на ее скорость есть импульс данной точки, то скорость центра масс будет равна сумме импульсов всех материальных точек представляющих данных тела отнесенной к массе тела. P1 P2 ... Pn P , где P - общий импульс. m m Таким образом, общий импульс тела будет равен P m. Взяв производную по времени: dP F dt d c m F mac - закон движения центра масс. dt Центр масс система материальных точек движется как материальная точка в которой сосредоточена вся масса тела или системы тел на которые действуют внешние силы равнодействующие которых приложены к центру масс. 5. Рассмотрим тело вращающееся относительно оси О. Пусть сила F приложена к телу в точке А, находящейся на расстоянии r от оси вращения, α – угол между F и r . Под действием этой силы тело начнет вращается. Вращательное действие силы характеризуется Моментом силы – М. А r α F О d F dP Запишем второй закон Ньютона через импульс: F . dt dP Умножим обе части равенства на (r), получим F r r. dt Правую часть равенства обозначим М – момент силы М F r в век- торном виде. Это момент силы F относительно точки О. Численное значение или модуль [М] определяется: М = F·r·sinα. Из рисунка видно, что r·sinα = d, тогда М=Fd. Момент силы равен произведению силы на плечо. M F d . 5 d – плечо – кратчайшее расстояние от оси вращения до линии действия силы М=[Н·м]. Момент силы всегда перпендикулярен плоскости, в которой лежат век тора F и r . Направление момента силы определяется правилом правого винта.