часть2_импульсные процессыx
реклама

СОДЕРЖАНИЕ
1
Качественные модели динамики сложных систем
4
2
Импульсные процессы на взвешенных орграфах
9
3
Устойчивость импульсных процессов
13
4
Связь устойчивости со структурой системы
19
5
Применение теории импульсных процессов к анализу сложных систем
23
Литература
26
3
1 КАЧЕСТВЕННЫЕ МОДЕЛИ ДИНАМИКИ СЛОЖНЫХ СИСТЕМ
Для построения качественных моделей динамики сложных систем целесообразно использовать знаковые орграфы в соответствии со следующей процедурой.
Этап 1. Элементы системы, значимые с точки зрения рассмотрения (решаемой задачи), обозначаются вершинами орграфа.
Этап 2. Значимые связи между элементами системы обозначаются дугами
орграфа. Дуга (𝑢, 𝑣) означает, что элемент 𝑢 влияет на элемент 𝑣.
Этап 3. Предполагается, что элементам (вершинам) могут приписываться
определенные числовые значения.
Если увеличение значения вершины 𝑢 влечет увеличение значения вершины
𝑣, а уменьшение значения 𝑢 влечет уменьшение значения вершины 𝑣, то дуге
(𝑢, 𝑣) присваивается знак «плюс». Если увеличение значения вершины 𝑢 влечет
уменьшение значения вершины 𝑣, а уменьшение значения вершины 𝑢 влечет увеличение значения вершины 𝑣, то дуге (𝑢, 𝑣) присваивается знак «минус».
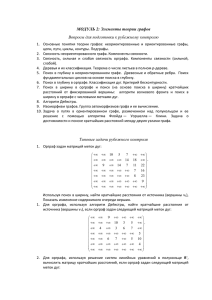
Рассмотрим следующий пример (рисунок 1).
P
M
G
C
B
S
D
Рисунок 1.
Знаковый орграф для анализа проблемы удаления мусора в городе [5]
Здесь 𝑃 – численность городского населения;
𝐺 – количество мусора на единицу площади;
4
𝐵 – бактериологическая зараженность на единицу площади;
𝐷 – число заболеваний;
𝑆 – число очистных сооружений;
𝐶 – миграция в город;
𝑀 – улучшение условий жизни в городе.
Например, улучшение условий жизни в городе подразумевает, в частности,
увеличение числа очистных сооружений (положительная дуга (𝑀, 𝑆)); увеличение
числа очистных сооружений снижает бактериологическую зараженность и заболеваемость (отрицательные дуги (𝑆, 𝐵), (𝑆, 𝐷)), и т.д.
Рассмотрим имеющиеся в системе обратные связи (в графовой модели они
отображаются контурами). Определим знак контура как произведение знаков образующих его дуг. Тогда возможны два типа контуров: положительные (положительная и обратная связь) и отрицательные (отрицательная обратная связь).
Рассмотрим, например, положительный контур (𝑃, 𝑀, 𝐶, 𝑃). Увеличение величины 𝑃 (прирост населения) влечет увеличение величины 𝑀 (дальнейшее
улучшение возможностей жителей большого города), что влечет увеличение С
(миграции в большой город) и вновь увеличение 𝑃 (прирост населения за счет
иммиграции). Таким образом, положительный контур (контур положительной обратной связи) усиливает отклонение: первоначальное увеличение значения некоторой вершины контура со временем еще более увеличивается (конечно, то же
самое происходит и с уменьшением).
Теперь рассмотрим отрицательный контур (𝑃, 𝐺, 𝐵, 𝐷, 𝑃). Увеличение значения 𝑃 (прирост населения) влечет увеличение 𝐺 (количества мусора), что влечет
увеличение 𝐵 (бактериологической зараженности), что влечет увеличение 𝐷 (заболеваемости), а это влечет уменьшение численности населения 𝑃 за счет смертности от болезней. Таким образом, отрицательный контур (контур отрицательной
обратной связи) противодействует отклонению: первоначальное увеличение зна-
5
чения некоторой вершины контура со временем нейтрализуется и значение приближается к исходному.
Можно сформулировать общее утверждение [5]: контур усиливает отклонение тогда и только тогда, когда он положителен (соответственно, противодействуют отклонению отрицательные контуры и только они).
С точки зрения системной динамики наличие большого числа положительных контуров означает неустойчивость: малые значения вершин со временем растут и «раскачивают» систему, что может привести к «авариям» и даже разрушению системы.
Напротив, отрицательные контуры оказывают стабилизирующее воздействие, они как бы «гасят» возникающие отклонения и сохраняют устойчивость
системы.
Рассмотрим еще один пример (рисунок 2).
Q
R
–
–
–
+
–
C
U
+
+
+
P
+
+
J
F
+
Рисунок 2
Знаковый орграф для анализа проблемы потребления электроэнергии [3]
Здесь 𝑈 – величина потребления электроэнергии;
𝑅 – стоимость электроэнергии;
𝐶 – энергетическая мощность;
𝐹 – число предприятий;
𝐽 – число рабочих мест;
6
𝑃 – численность населения;
𝑄 – качество окружающей среды.
Выделим имеющиеся в системе контуры и присвоим им знак:
𝑈𝑅𝑈
:плюс
𝑈𝑄𝑃𝑈
: минус
𝑈𝐶𝑅𝑈
: плюс
𝑈𝐶𝐹𝑈
: плюс
𝑈𝐶𝐹𝐽𝑃𝑈 : плюс
Таким образом, из пяти контуров четыре являются контурами положительной обратной связи и усиливают отклонение. Можно заключить, что система является существенно неустойчивой.
Упражнение 1.1 Объяснить смысл дуги (𝐹, 𝑈) на рисунке 2.
Упражнение 1.2 Почему дуга (𝑄, 𝑃) на рисунке 2 положительна?
Упражнение 1.3 Рассмотрим знаковые орграфы на рисунке 3 и 4.
+
1
+
7
9
+
+
–
3
8
+
–
+
2
6
–
+
–
4
5
Рисунок 3. Знаковый орграф для системы «Наука и общество» [3]:
1 – число рабочих мест для научных работников;
2 – число слабо подготовленных исследователей;
3 – доля «плохой» научной продукции или вредные последствия использования результатов научных исследований;
4 – внешние и внутренние угрозы обществу, для преодоления которых требуется применение достижений науки и техники;
5 – общественное мнение в пользу развития науки;
7
6 – бюджетные ограничения;
7 – государственный бюджет научных исследований;
8 – число хорошо подготовленных исследователей;
9 – доля «добротной» научной продукции или положительные последствия
использования результатов науки и техники.
+
1
+
+
2
+
–
+
+
4
+
+
5
+
+
+
–
–
3
+
Рисунок 4.
Знаковый орграф для выбора личного или общественного транспорта [3]:
1 – стоимость автомобиля;
2 – использование автомобилей;
3 – комфорт и преимущества пользования автомобилем;;
4 – свобода выбора в поездке;
5 – скорость.
Ответить на следующие вопросы для рисунков 3-4:
а) найти контуры, усиливающие отклонение, и обсудить результат;
б) найти контуры, противодействующие отклонению, и обсудить результат;
в) сделать общий качественный вывод об устойчивости системы, представленной орграфом;
г) определить вершины, значения которых трудно определить количественно, или убедиться, что таковых нет;
8
д) определить дуги, знак которых может меняться при различных значениях
вершин, или показать, что таковых нет;
е) имеется ли такая вершина, что каждый проходящий через нее контур
усиливает отклонение?
ж) можно ли увеличить устойчивость системы, изменяя знак некоторых
дуг?
2 ИМПУЛЬСНЫЕ ПРОЦЕССЫ НА ВЗВЕШЕННЫХ ОРГРАФАХ
Описанные в предыдущем разделе модели являются сугубо качественными,
позволяя представить структуру сложной системы в общем виде и сделать предварительные заключения об устойчивости системы исходя из наличия обратных
связей различного типа.
Для более точного количественного описания структурной динамики поступим следующим образом. Припишем каждой вершине 𝑢𝑖 орграфа 𝐷 = (𝑁, 𝐴)
некоторое значение 𝑣𝑖 (𝑡) ∈ ℝ, считая при этом, что время 𝑡 принимает дискретные значения 𝑡 = 0, 1, 2, … . Таким образом, значение вершины есть функция дискретного времени 𝑣𝑖 : 𝑍+ → ℝ.
Назовем импульсом вершины 𝑢𝑖 в момент 𝑡 величину
𝑝𝑖 (𝑡) = 𝑣𝑖 (𝑡) − 𝑣𝑖 (𝑡 − 1),
𝑡 = 1, 2, …
(1)
Как видно из формулы (1), импульс показывает изменение значения вершины при переходе от 𝑡 − 1 к 𝑡.
Каждой дуге (𝑢𝑖 , 𝑢𝑗 ) ∈ 𝐴 припишем значение 𝑤𝑖𝑗 ∈ ℝ, считая его для простоты не зависящим от времени. Значение 𝑤𝑖𝑗 обычно называют весом дуги.
Определение 2.1 Импульсный процесс во взвешенном орграфе задается
формулой
𝑣𝑗 (𝑡 + 1) = 𝑣𝑗 (𝑡) + ∑𝑛𝑖=1 𝑤𝑖𝑗 𝑝𝑖 (𝑡),
9
𝑗 = 1, 2, … , 𝑛.
(2)
Формула (2) определяет изменения значений всех вершин орграфа при переходе от 𝑡 к 𝑡 + 1 с учетом импульсов во всех входных вершинах, взятых с весами соответствующих входных дуг. Заметим, что возможны и иные правила изменения значений вершин орграфа [4], однако здесь мы ограничим рассмотрение
формулой (2).
Заметим, что в силу определения импульса формулу (2) можно переписать в
виде
𝑝𝑗 (𝑡 + 1) = ∑𝑛𝑖=1 𝑤𝑖𝑗 𝑝𝑖 (𝑡),
𝑗 = 1, 2, … , 𝑛,
(3)
т.е. она представляет собой систему конечно-разностных уравнений относительно
импульсов. Обозначим
𝑛
𝑝(𝑡) = (𝑝1 (𝑡), … , 𝑝𝑛 (𝑡) ), 𝑊 = ‖𝑤𝑖𝑗 ‖𝑖,𝑗=1 и перепишем формулу (3) в матричном
виде:
𝑝(𝑡 + 1) = 𝑊𝑝(𝑡).
(4)
Будем считать известным начальное значение вектора
𝑝0 = 𝑝(0) = (𝑝1 (0), … , 𝑝𝑛 (0)).
Последовательно выписывая соотношения
𝑝(1) = 𝑊𝑝0
𝑝(2) = 𝑊𝑝(1) = 𝑊 2 𝑝0
𝑝(3) = 𝑊𝑝(2) = 𝑊 3 𝑝0 ,
⋯
несложно выявить и доказать методом математической индукции утверждение
𝑝(𝑡) = 𝑊 𝑡 (𝑝0 ).
(5)
Таким образом, если известен вектор начальных импульсов 𝑝0 и матрица
весов 𝑊, то по формуле (5) можно вычислить вектор импульсов во всех вершинах
орграфа в любой момент времени 𝑡.
Если известен также начальный вектор значений вершин
10
𝑣0 = 𝑣(0) = (𝑣1 (0), … , 𝑣𝑛 (0)), то по формуле (2) можно вычислить вектор значений всех вершин орграфа в любой момент времени 𝑡, т. е. полностью решить задачу прогноза.
Упражнение 2.1 Пусть для знакового орграфа на рисунке 5
–
𝑢1
𝑢2
+
–
+
–
+
+
+
+
𝑢4
𝑢3
+
Рисунок 5
𝑣(0) = (0, 0, 0,0), 𝑝(0) = (0, 0, 0,1).
Вычислить 𝑣(1), 𝑝(1), 𝑣(2), 𝑝(2), 𝑣(3).
Упражнение 2.2 Рассмотрим импульсный процесс на взвешенном орграфе,
изображенном на рисунке 6:
-3
𝑢3
9
𝑢1
5
2
2
-1
𝑢4
𝑢2
8
Рисунок 6
а) пусть значение вершины 𝑢2 увеличивается на единицу в момент времени
𝑡 = 0. Что произойдет с вершиной 𝑢4 в момент времени 𝑡 = 1?
б) пусть значения вершин 𝑢3 и 𝑢4 увеличиваются на единицу при 𝑡 = 0. Что
произойдет с вершиной 𝑢1 в момент времени 𝑡 = 1?
11
Упражнение 2.3 Использовать формулу (5) для вычисления 𝑝2 (3) и 𝑣2 (3) в
импульсном процессе для орграфа на рисунке 6 при условиях 𝑝(0) = (0, 0, 1,0),
𝑣(0) = (0, 0, 0,0).
Упражнение 2.4 Пусть в модели биологического сообщества на рисунке 7
𝑢1
𝑢2
+
–
+
–
кролики
лисы
Рисунок 7. Сообщество «кролики и лисы»
𝑣(0) = (10, 10), 𝑝(0) = (1, 0).
Вычислить импульсы и значения вершин при 𝑡 = 1, 2, 3 и дать экологическую интерпретацию.
Упражнение 2.5 Пусть в модели сообщества на рисунке 8
𝑢1
𝑢2
+
–
–
+
–
травоядные
растения
𝑢3
плотоядные
Рисунок 8. Сообщество «растения–травоядные–плотоядные»
𝑣(0) = (10, 10, 10), 𝑝(0) = (1, 0, 0).
Вычислить импульсы и значения вершин при 𝑡 = 1, 2, 3, 4 и дать экологическую
интерпретацию.
Упражнение 2.6 Пусть в модели сообщества на рисунке 9
+
+
𝑢2
–
–
𝑢1
–
+
–
–
𝑢3
–
Рисунок 9. Сообщество «орлы (𝑢1 )–мыши (𝑢2 )–крысы (𝑢3 )»
𝑣(0) = (10, 10, 10), 𝑝(0) = (1, 0, 0).
Вычислить импульсы и значения вершин при 𝑡 = 1, 2, 3, 4 и дать экологическую
интерпретацию.
12
3 УСТОЙЧИВОСТЬ ИМПУЛЬСНЫХ ПРОЦЕССОВ
Применительно к импульсным процессам на взвешенных орграфах используют два понятия устойчивости.
Определение 3.1 Вершина 𝑢𝑖 называется импульсно устойчивой в импульсном процессе, если последовательность {|𝑝𝑖 (𝑡)|} ограничена, т. е. существует такое 𝐵 > 0, что |𝑝𝑖 (𝑡)| < 𝐵 для всех 𝑡 = 0, 1, 2, …
Определение 3.2 Вершина 𝑢𝑖 называется абсолютно устойчивой в импульсном процессе, если последовательность {|𝑣𝑖 (𝑡)|} ограничена/
Определение 3.3 Взвешенный орграф называется импульсно (абсолютно)
устойчивым в импульсном процессе, если этим свойством обладает каждая его
вершина.
Пусть 𝑣𝑖 (𝑡) = 𝑎𝑡 (𝑎 > 1) : тогда имеем при 𝑡 > 0
𝑝𝑖 (𝑡) = 𝑣𝑖 (𝑡) − 𝑣𝑖 (𝑡 − 1) = 𝑎𝑡 − 𝑎𝑡−1 = (𝑎 − 1)𝑎𝑡−1
и обе последовательности 𝑎𝑡 и (𝑎 − 1)𝑎𝑡−1 не ограничены.
Зато при 𝑣𝑖 (𝑡) = 𝑎𝑡 (0 < 𝑎 < 1) в вершине 𝑢𝑖 имеет место импульсная и абсолютная устойчивость. Если 𝑣𝑖 (𝑡 − 1) = 𝑎𝑡 + 𝑏, то вершина 𝑢𝑖 абсолютно неустойчива, но импульсно устойчива, поскольку 𝑝𝑖 (𝑡) = 𝑎
В общем случае абсолютная устойчивость в вершине 𝑢𝑖 тем более означает
импульсную устойчивость в этой вершине, поскольку при 𝑡 > 0
|𝑝𝑖 (𝑡)| = |𝑣𝑖 (𝑡) − 𝑣𝑖 (𝑡 − 1)| ≤ |𝑣𝑖 (𝑡)| + |𝑣𝑖 (𝑡 − 1)|.
Поэтому, если последовательность {𝑣𝑖 (𝑡)} ограничена числом 𝐵, то |𝑣𝑖 (𝑡)| < 𝐵 и
|𝑣𝑖 (𝑡 − 1)| < 𝐵, откуда последовательность {|𝑝𝑖 (𝑡)|} ограничена числом 2𝐵.
Обратное утверждение неверно (рисунок 10).
𝑢1
+
𝑢2
+
Рисунок 10
13
В импульсном процессе на этом орграфе при 𝑝(0) = (1, 0) импульс 𝑝1 (𝑡)
всегда равен 0 или 1, но 𝑣1 (𝑡) увеличивается на единицу через каждые два периода времени. Это и означает импульсную, но не абсолютную устойчивость вершины 𝑢1 .
Как и в случае качественного анализа, вывод о неустойчивости предупреждает о возможности разрушения системы в силу того, что значения некоторых ее
вершин неограниченно возрастают.
Вопрос о критериях устойчивости рассмотрим для частного, но достаточно
содержательного класса импульсных процессов.
Определение 3.4 Импульсный процесс, определяемый формулой (2), называется простым, если одна из компонент вектора 𝑝(0) равна единице, а остальные равны нулю.
Решение вопроса об устойчивости взвешенных орграфов для простых импульсных процессов связано с собственными значениями орграфа (то есть собственными значениями его матрицы весов). Напомним, что матрица весов орграфа 𝐷 = (𝑁, 𝐴) имеет вид 𝑊 = ‖𝑤𝑖𝑗 ‖, где 𝑤𝑖𝑗 – вес дуги (𝑢𝑖 , 𝑢𝑗 ), 𝑖, 𝑗 = 1, … , 𝑛. Собственными значениями матрицы 𝑊 для собственного вектора 𝑥 называются решения характеристического уравнения
𝐶(𝜆) = 𝑑𝑒𝑡(𝑊 − 𝜆𝐸) = 0,
полином 𝐶(𝜆) также называется характеристическим. Напомним также, что абсолютная величина комплексного числа 𝑎 + 𝑏𝑖 есть √𝑎2 + 𝑏 2 . Доказательства всех
теорем этого раздела можно найти в [3].
Теорема 3.1 Если взвешенный орграф 𝐷 импульсно устойчив для всех простых импульсных процессов, то каждое собственное значение 𝐷 по абсолютной
величине не превосходит единицу.
Практическое значение имеет утверждение, обратное к этому необходимому условию: если хотя бы одно собственное значение 𝐷 превосходит по модулю
14
единицу, то 𝐷 импульсно неустойчив для некоторого простого импусного процесса.
Рассмотрим орграф на рисунке 11а
𝑢2
0
3
-2 0
0
0
0
0
2
0
W= 0
0
0
-1
0
1
0
0
0 16
0
0
0
0
2
3
𝑢1
𝑢4
1
-2
16
𝑢5
-1
0
𝑢3
а
б
Рисунок 11
Его матрица весов показана на рисунке 11б. Составляя несложное характеристическое уравнение 𝜆2 (𝜆2 − 8) = 0, обнаруживаем собственное значение 𝜆 =
2. Таким образом, данный взвешенный орграф импульсно неустойчив для некоторого простого импульсного процесса. Это означает наличие такой вершины, что
поступление начального импульса в нее влечет появление сколь угодно большого
импульса в некой (возможно, другой) вершине. Однако этот взвешенный орграф
не обязан быть импульсно неустойчивым для всех простых импульсных процессов (например, можно рассмотреть простой импульсный процесс с начальной
вершиной 𝑢5 ).
Следствие к теореме 3.1 Если орграф 𝐷 с целочисленными весами дуг импульсно устойчив для всех простых импульсных процессов, то каждое ненулевое
собственное значение по модулю равно единице.
Рассмотрим знаковый орграф на рисунке 12.
15
𝑢2
0
1
0
1
-1 0
0
0
W= -1 0
0
0
1
0
–
+
𝑢1
+
–
0
𝑢4
0
+
𝑢3
а
б
Рисунок 12
Его характеристический полином есть 𝐶(𝜆) = 𝜆(𝜆3 + 𝜆 + 1) = 0. Заметим,
что для полинома 𝑓(𝜆) = 𝜆3 + 𝜆 + 1 имеет место 𝑓(0) = 1, 𝑓(−1) = −1. Таким
образом, 𝑓 имеет действительный корень 𝜆0 строго между -1 и 0 (рисунок 13), и
поэтому существует собственное значение 𝜆0 , по модулю меньше 1. Согласно
следствию к теореме 3.1 этот орграф импульсно неустойчив для некоторого простого импульсного процесса.
𝑓(𝜆)
1
−1
0
𝜆
−1
Рисунок 13
Такой тип рассуждений весьма популярен при использовании теорем о собственных значениях орграфов.
Обратное к теореме 3.1 утверждение неверно. Рассмотрим орграф на рисунке 14. Его собственные значения 𝜆1 = 𝜆2 = 1,
+
+
W=
𝑢1
𝑢2
Рисунок 14
16
1
1
0
1
но он импульсно неустойчив для простого импульсного процесса с начальной
вершиной 𝑢1 , поскольку здесь 𝑝2 (𝑡) → ∞. Однако справедлива следующая
Теорема 3.2 Пусть все ненулевые собственные значения взвешенного орграфа 𝐷 различны и не превосходят по абсолютной величине единицы. Тогда 𝐷
импульсно устойчив для всех простых импульсных процессов.
Рассмотрим орграф на рисунке 15.
𝑢2
0 0.391 0.121
0
0
0
0
1
W= 0
0
0
-1
1
0
0
0
1
0.391
𝑢4
1
-0.121
-1
𝑢3
а
б
Рисунок 15
Его характеристический полином 𝐶(𝜆) = 𝜆4 − 0.512𝜆 = 𝜆(𝜆3 − 0.512). Решая
характеристическое
уравнение,
находим
корни
𝜆1 = 0;
𝜆2 = 0.8;
𝜆3 = 0.4(−1 + 𝑖√3); 𝜆4 = 0.4(−1 − 𝑖 √3). Ненулевые собственные значения различны и (проверьте!) по модулю не превосходят единицу. Поэтому взвешенный
орграф импульсно устойчив для всех простых импульсных процессов.
Теорема 3.3 Взвешенный орграф 𝐷 абсолютно устойчив для любого простого импульсного процесса тогда и только тогда, когда 𝐷 импульсно устойчив
для любого простого импульсного процесса и среди собственных значений 𝐷 нет
равного единице.
В качестве примера абсолютно устойчивого орграфа можно взять тот же орграф на рисунке 15.
Упражнение 3.1 Пусть для импульсного процесса во взвешенном орграфе
𝑣𝑗 (𝑡) определяется следующим образом:
17
а) 𝑣𝑗 (𝑡) = 2𝑡 ;
б) 𝑣𝑗 (𝑡) = 6𝑡 + 5;
в) 𝑣𝑗 (𝑡) = 4;
г) 𝑣𝑗 (𝑡) = (−3)𝑡 ;
1 𝑡
д) 𝑣𝑗 (𝑡) = ( ) ;
3
1 𝑡
е) 𝑣𝑗 (𝑡) = (− ) ;
3
ж) 𝑣𝑗 (𝑡) = (−1)𝑡 ;
1 𝑡
з) 𝑣𝑗 (𝑡) = ( ) + 100;
3
и) 𝑣𝑗 (𝑡) = sin 𝑡.
Будет ли вершина 𝑢𝑗 абсолютно устойчива в каждом импульсном процессе?
А импульсно устойчива?
Упражнение 3.2 Ниже перечислены собственные значения взвешенного орграфа. Что можно сказать об импульсной и абсолютной устойчивости для простого импульсного процесса?
а) 0,1, −1, 𝑖, −𝑖, 5;
б) 0, 𝑖√3, −𝑖 √3;
1
в) , 𝑖, −𝑖;
3
1
г) , 1, −1;
3
1 1
д) , , 𝑖, −𝑖;
3 3
е) 0, 5,5,1.
Упражнение 3.3 Что можно сказать об импульсной и абсолютной устойчивости орграфа на рисунке 16?
1
-0.2
0.5
1
-0.3
0.4
Рисунок 16
18
4 СВЯЗЬ УСТОЙЧИВОСТИ СО СТРУКТУРОЙ СИСТЕМЫ
Теоремы предыдущего раздела позволяют решить вопрос об устойчивости
взвешенных орграфов, но не дают рекомендаций по поводу изменений, необходимых для перехода от неустойчивой системы к устойчивой. Такие рекомендации
можно дать для следующего специфического, но достаточно содержательного
класса орграфов.
Определение 4.1 Орграф называется розеткой, если он состоит из центральной вершины 𝑥 и непересекающихся (кроме 𝑥) контуров, выходящих из 𝑥.
Примеры розеток приведены на рисунке 17.
x
x
x
Рисунок 17
Определение 4.2 Обобщенной розеткой называется сильно связный орграф, центральная вершина которого принадлежит всем его контурам.
Разумеется, каждая розетка является и обобщенной розеткой. На рисунке 18
показано несколько обобщенных розеток, отличных от розеток.
Рисунок 18
Пусть орграф 𝐷 – обобщенная знаковая розетка. Обозначим через 𝑎𝑖 сумму
знаков контуров длины 𝑖 (считая плюс как 1, а минус как –1). Пусть 𝑠 – такое
наибольшее целое, что 𝑎𝑠 ≠ 0. Если 𝑠 = 0, то можно показать, что 𝐷 импульсно и
абсолютно устойчив для всех простых импульсных процессов. Если 𝑠 > 0, то
свойства устойчивости орграфа 𝐷 полностью определяются лепестковой последовательностью (𝑎1 , … , 𝑎𝑠 ).
19
Теорема 4.1 [3] Если две обобщенные розетки имеют одинаковые лепестковые последовательности, то они импульсно (абсолютно) устойчивы или неустойчивы одновременно.
Доказательства следующих двух теорем также можно найти в [3].
Теорема 4.2 Пусть 𝐷 – обобщенная знаковая розетка с лепестковой последовательностью (𝑎1 , … , 𝑎𝑠 ), 𝑠 > 0. Если 𝐷 импульсно устойчива для всех простых
импульсных процессов, то:
а) 𝑎𝑠 = ±1;
б) 𝑎𝑖 = (−𝑎𝑠 )𝑎𝑠−𝑖 , 𝑖 = 1, 2, … , 𝑠 − 1.
Теорема 4.3 Пусть 𝐷 – обобщенная знаковая розетка с лепестковой последовательностью (𝑎1 , … , 𝑎𝑠 ), 𝑠 > 0, импульсно устойчивая для всех простых импульсных процессов. Тогда 𝐷 абсолютно устойчива для всех простых импульсных
процессов тогда и только тогда, когда ∑𝑠𝑖=1 𝑎𝑖 ≠ 1.
𝑏
+
+
+
+
–
+
+
x
–
+
–
+
+
𝑎
+
+
x
–
+
+
+
+
𝐷1
𝐷2
Рисунок 19
Рассмотрим обобщенную знаковую розетку 𝐷1 на рисунке 19. Имеем 𝑎1 = 0
(петель нет), 𝑎2 = 2 (два положительных контура длины 2), 𝑎3 = 0 (два контура
длины три – положительный и отрицательный). Таким образом, 𝑠 = 2, и лепестковая последовательность имеет вид (0, 2). Поскольку 𝑎2 ≠ 1, то 𝐷1 импульсно
неустойчива для некоторого простого импульсного процесса.
Можно ли исправить положение? Очевидно, да: например, изменяя знак
любой дуги, входящей в один из контуров длины два, но не входящей в контур
длины три, получаем 𝑎2 = 0, т.е. вырожденную лепестковую последовательность
20
при 𝑠 = 0. Как было сказано выше, в этом случае орграф импульсно и абсолютно
устойчив для всех простых импульсных процессов.
Рассмотрим теперь обобщенную знаковую розетку 𝐷2 на рисунке 19. Ее лепестковая последовательность имеет вид (0, −2, 3), что опять-таки в силу теоремы
4.2 означает импульсную неустойчивость для некоторого простого импульсного
процесса. Пусть орграф 𝐷2 ′ получен из 𝐷2 изменением знака дуги (𝑥, 𝑎) с плюса
на минус. Тогда 𝐷2 ′ имеет лепестковую последовательность (0, −2, 1) и условие
𝑎𝑠 = ±1 удовлетворяется, но не удовлетворяется второе условие теоремы 4.2, поскольку 𝑎1 ≠ (−𝑎3 )𝑎2 . Поэтому 𝐷2 ′ остается неустойчивым для некоторого простого импульсного процесса.
Теорема 4.2 предлагает потенциально стабилизирующую стратегию: сделать положительным один из контуров длины 2, чтобы получить 𝑎2 = 0. Например, если 𝐷2 ′′ получается из 𝐷2 ′ изменением знака дуги (𝑏, 𝑥) c минуса на плюс,
то 𝐷2 ′′ имеет лепестковую последовательность (0, 0, 1). Она удовлетворяет обоим
условиям теоремы 4.2, но заключение об импульсной устойчивости пока сделать
все же нельзя, так как теорема 4.2 дает лишь необходимые условия.
Однако известно, что характеристический полином обобщенной розетки
имеет вид
𝐶(𝜆) = (−1)𝑛 𝜆𝑛−𝑠 (𝜆𝑠 − ∑𝑠𝑖=1 𝑎𝑖 𝜆𝑠−𝑖 ),
(6)
где 𝑛 – число вершин. В нашем примере 𝐶(𝜆) = −𝜆4 (𝜆3 − 1), откуда находим
1
3
1
3
2
2
2
2
собственные значения 0, 0, 0, 0, 1, − + 𝑖√ , − − 𝑖√ . Ненулевые собственные
значения различны и равны по модулю единице, поэтому импульсная устойчивость действительно имеет место по теореме 3.2.
Теперь
исследуем
свойство
абсолютной
устойчивости.
Поскольку
𝑎1 + 𝑎2 + 𝑎3 = 1, то 𝐷2 ′′ абсолютно неустойчив для некоторого простого импульсного процесса. Если вернуться к орграфу 𝐷2 и изменить знак дуг (𝑥, 𝑎) и
(𝑥, 𝑏) с плюса на минус, то получим потенциально абсолютно устойчивую знако21
вую розетку с лепестковой последовательностью (0, 0, −1). Находя по формуле (6)
характеристический
0, 0, 0, 0, 1,
1
3 1
3
2 2
2
полином
𝐶(𝜆) = 𝜆4 (𝜆3 + 1)
и
его
корни
+ 𝑖√ , − 𝑖√ , получаем по теореме 3.3 абсолютную устойчивость
2
для всех простых импульсных процессов.
Таким образом, теоремы 4.2 и 4.3 можно использовать для нахождения потенциальных импульсно и абсолютно стабилизирующих стратегий. Однако для
окончательного заключения необходимо использовать теоремы 3.2 и 3.3 с помощью формулы (6).
Упражнение 4.1 Пусть лепестковая последовательность обобщенной знаковой розетки имеет вид:
а) (1, 0, 2);
б) (0, −1, 3, 1);
в) (0, −1, 0, 1);
г) (0, 5, −5, 0, 1).
Что можно сказать об импульсной и абсолютной устойчивости в каждом
случае?
Упражнение 4.2 Для изображенных на рисунке 20 обобщенных знаковых
розеток решить вопрос об устойчивости. Если ее нет, то существуют ли стабилизирующие стратегии?
+
+
+
–
+
+
–
+
–
а
+
–
б
–
в
Рисунок 20
22
+
+
+
+
+
+
–
+
+
–
+
–
+
+
–
г
д
Рисунок 20
5 ПРИЛОЖЕНИЕ ТЕОРИИ ИМПУЛЬСНЫХ ПРОЦЕССОВ
К АНАЛИЗУ СЛОЖНЫХ СИСТЕМ
В разделе 1 были рассмотрены качественные модели структуры сложных
систем, а в разделах 2-4 – количественная теория импульсных процессов и устойчивости взвешенных орграфов. Теперь осуществим синтез: применим количественную теорию устойчивости к качественным моделям.
Вернемся к модели потребления электроэнергии (рисунок 2). Заметим, что
этот орграф представляет собой обобщенную розетку с центральной вершиной 𝑈.
Тогда
по
формуле
(6)
вычисляем
характеристический
полином
𝐶(𝜆) = −𝜆2 (𝜆5 − 𝜆3 − 𝜆2 − 1). Используя предложенный в разделе 3 прием, находим, что 𝑓(𝜆) = 𝜆5 − 𝜆3 − 𝜆2 − 1 имеет действительный корень строго между 1 и
2, так как 𝑓(1) = −2, 𝑓(2) = 19. Таким образом, имеются собственные значения,
превосходящие по модулю 1, и в силу теоремы 3.1 данный знаковый орграф импульсно и тем более абсолютно неустойчив для некоторого простого импульсного
процесса.
Если считается нежелательным, чтобы возникли произвольно большие импульсы и соответствующие значения в некоторой вершине (а здесь это так), то
следует изменить структуру системы. Целесообразно попытаться осуществить та-
23
кое изменение с наименьшими затратами, что требует сравнительного анализа
имеющихся возможностей управления (изменить знак не более чем двух дуг).
Поскольку модельный орграф является обобщенной розеткой, то для предварительного выявления потенциально стабилизирующих стратегий полезно использовать теоремы 4.2-4.3. В орграфе имеется один контур длины 2, два контура
длины 3 и один длины 5. Поэтому при любом сочетании знаков имеем 𝑎1 = 0,
𝑎2 = ±1, 𝑎3 = ±1 или ±3, 𝑎4 = 0, 𝑎5 = ±1.
Таким образом, всегда 𝑠 = 5 и 𝑎5 = ±1. Чтобы получить импульсную
устойчивость, необходимо обеспечить 𝑎𝑖 = (−𝑎5 )𝑎5−𝑖 , 𝑖 = 1, 2, 3, 4, а для абсолютной устойчивости дополнительно 𝑎2 + 𝑎3 + 𝑎5 ≠ 1. Поскольку 𝑎1 = 𝑎4 = 0,
то нужно найти такие значения 𝑎2 , 𝑎3 , 𝑎5 , чтобы 𝑎2 = ±1, 𝑎3 = ±1, 𝑎5 = ±1, 𝑎2 =
−𝑎5 𝑎3 , 𝑎2 + 𝑎3 + 𝑎5 ≠ 1. Единственными числами, удовлетворяющими этим
условием, являются 𝑎2 = 𝑎3 = 𝑎5 = −1.
Чтобы получить 𝑎2 = −1, нужно изменить знак одной из дуг (𝑈, 𝑅) или
(𝑅, 𝑈). Если был изменении знак дуги (𝑈, 𝑅), то получить 𝑎3 = 𝑎5 = −1 можно
единственным способом: изменяя знак дуги (𝐶, 𝐹). Если же был изменен знак дуги (𝑅, 𝑈), то получить 𝑎3 = 𝑎5 = −1 можно двумя и только двумя способами: изменяя знак либо дуги (𝐹, 𝐽), либо дуги ( 𝐽, 𝑃).
Таким образом, имеются три потенциально стабилизирующие стратегии,
состоящие в изменении знаков не более чем двух дуг: изменить знаки дуг (𝑈, 𝑅) и
(𝐶, 𝐹), (𝑅, 𝑈) и (𝐹, 𝐽) или (𝑅, 𝑈) и ( 𝐽, 𝑃).
Подчеркнем еще раз, что найденные стратегии являются только потенциально стабилизирующими, поскольку теоремы 4.2-4.3 дают необходимые условия
импульсной (абсолютной) устойчивости. Необходимо дополнительно использовать теоремы 3.2-3.3, вычислив предварительно характеристический полином по
формуле (6) и найдя его корни. В данном случае можно показать (упражнение 5.2), что найденные стратегии действительно обеспечивают абсолютную
устойчивость.
24
Упражнение 5.1 Дать интерпретацию знаков дуг, образующих стабилизирующие стратегии в рассмотренном примере, и обсудить возможность их практического применения.
Упражнение 5.2 Показать, что найденные потенциально стабилизирующие
стратегии действительно приводят к абсолютной устойчивости орграфа для всех
простых импульсных процессов.
Упражнение 5.3 Исследовать устойчивость орграфа на рисунке 1. В случае
неустойчивости предложить потенциально стабилизирующие стратегии, исходя
из свойств обобщенных знаковых розеток, и убедиться в том, что они действительно приводят (или не приводят) к устойчивости.
Упражнение 5.4 Для знакового орграфа, изображенного на рисунке 4, характеристический полином имеет вид 𝐶(𝜆) = 𝜆5 − 𝜆4 + 𝜆3 + 9𝜆2 + 3𝜆.
Будет ли этот орграф импульсно и абсолютно устойчивым для всех простых
импульсных процессов?
Упражнение 5.5 Рассмотреть биологическое сообщество «кролики и лисы»,
изображенное моделью на рисунке 7 (упражнение 2.4):
а) показать, что эта система импульсно и абсолютно устойчива для всех
простых импульсных процессов;
б) пояснить смысл импульсной и абсолютной устойчивости в экологических
терминах;
в) показать, что при определенном выборе весов дуг система перестает быть
импульсной и абсолютно устойчивой. Дать интерпретацию этому факту.
Упражнение
5.6
Рассмотреть
экосистему
«растения-травоядные-
плотоядные» на рисунке 8 (упражнение 2.5). Показать, что она импульсно неустойчива для некоторого простого импульсного процесса, и дать интерпретацию
этому результату.
Упражнение 5.7 Рассмотреть сообщество на рисунке 9 (упражнение 2.6):
а) показать, что оно импульсно и абсолютно устойчиво;
25
б) показать, что оно импульсно неустойчиво, если петля (орлы, орлы) отсутствует или отрицательна;
в) обсудить, какая из гипотез более реалистична.
ЛИТЕРАТУРА
1 Кемени Дж., Снелл Дж. Кибернетическое моделирование: Некоторые
приложения. – М.: Сов. радио, 1972. – 192 с.
2 Мартынюк Д.И. Лекции по качественной теории разностных уравнений. –
Киев: Наукова думка, 1972. – 246 с.
3 Робертс Ф. Дискретные математические модели с приложениями к социальным, биологическим и экологическим задачам – М.: Мир, 1986. – 496 с.
4. Угольницкий Г.А. Линейная теория иерархических систем. – М.: ИСА
РАН, 1996. – 55 с.
5 Maryama M. The Second Cybernetics: Deviation-amplifying Mutual Casual
Processes // American Scientist, 51 (1963), p. 164-179.
26