УДК 629.7.054.44 Е.О.АРИСКИН, А.В. НИКИТИН, В.В. СОЛДАТКИН, В.М. СОЛДАТКИН
реклама

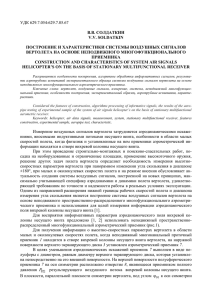
УДК 629.7.054.44 Е.О.АРИСКИН, А.В. НИКИТИН, В.В. СОЛДАТКИН, В.М. СОЛДАТКИН E.O.ARISKIN, A.V.NIKITIN, V.V. SOLDATKIN, V.M.SOLDATKIN СТРУКТУРА И АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ СИСТЕМЫ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ВЕТРА НА БОРТУ ВЕРТОЛЕТА НА ОСНОВЕ АЭРОМЕТРИЧЕСКИХ И ИОННО-МЕТОЧНЫХ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ THE STRUCTURE AND ALGORITHMS OF PROCESSING INFORMATION OF MEASUREMENT SYSTEM OF THE WIND VECTOR ON BOARD HELICOPTER ON THE BASIS OF THE AERODYNAMIC AND ION-LABEL MEASURING CHANNELS Рассматриваются актуальность решаемой задачи, принципы построения, алгоритмы обработки первичной информации и достоинства бортовой системы измерения параметров вектора ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета. Ключевые слова: Ветер, параметр, измерение на вертолете, система, аэрометрические и ионнометочные измерительные каналы, построение, алгоритмы обработки информации. The relevance of the problem, principles of construction, algorithms of processing of the primary information and advantages of onboard measurement system of wind vector in the parking lot, the starting and take-off and landing modes of the helicopter are considered. Keywords: Wind, parameters, measurement on the helicopter, system, aerometric and ion-label measuring channels, construction, information processing algorithms. Эксплуатация вертолетов происходит в приземном возмущенном слое атмосферы в условиях воздействия опасных внешних возмущений, влияющих на безопасность и эффективность выполнения полетных задач. При этом, на стоянке до запуска силовой установки и при раскрутке несущего винта, при рулении и маневрировании по земной поверхности (стартовый режим), на этапах взлета, снижения, висения и посадки (взлетнопосадочные режимы) для предотвращения авиационных происшествий, связанных с опрокидыванием вертолета на бок или хвостовую балку, соударением лопастей несущего винта с землей, рулевым винтом и между собой [1] экипажу необходима достоверная информация о текущем значении скорости и угла направления вектора ветра относительно продольной оси вертолета при изменении его положения в азимуте в диапазоне ±180º. Это определяет необходимость использования бортовых средств измерения параметров вектора ветра для обеспечения требований, регламентируемых Руководством по летной эксплуатации вертолета [2]. На рис.1 приведена структурно-функциональная схема системы измерения параметров вектора ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета, построенная на основе комбинации ионно-меточных и аэрометрических измерительных каналов. Система измерения параметров вектора ветра на борту вертолета выполнена по двухканальной схеме и включает ионно-меточный канал измерения величины W и направления ψ вектора W ветра на стоянке до запуска силовой установки. В качестве ионно-меточного канала используется панорамный ионно-меточный датчик аэродинамического угла и воздушной скорости [3], включающий плату 1 с системой приемных электродов 3, в центре 0 которой установлен искровой разрядник 2, подключенный к генератору меток (ГМ) 4. При подаче на высоковольтный разрядник 2 высоковольтного импульса от генератора меток (ГМ) 4 формируется ионная метка с явно выраженным электростатическим зарядом, которая движется совместно с воздушным потоком вектора ветра W , приобретая его Работа выполнена в рамках базовой части государственного задания в сфере научной деятельности по заданию Минобрнауки России № 2014/55 (НИР № 990). скорость W и направление ψ. При приближении заряженной ионной метки к приемным электродам 3, расположенным на окружности радиусом R, на них наводятся электростатические Рисунок 1 – Структурно-функциональная схема системы измерения параметров вектора ветра на основе ионно-меточных и аэрометрических измерительных каналов заряды, величина которых зависит от расстояния ионной метки до приемного электрода и углового положения ψ траектории движения метки. За счет выбора конструктивных параметров системы приемных электродов [3, 4] с помощью четных и нечетных приемных электродов формируются положительные и отрицательные полуволны синусоидальных угловых характеристик информативных сигналов U(ψ) на выходе четных предварительных усилителей. С помощью нечетных приемных электродов формируются положительные и отрицательные полуволны косинусоидальных угловых характеристик информативных сигналов U(ψ) на выходе нечетных предварительных усилителей. Выходные сигналы блока предварительных усилителей (БПУ) 5 подаются на входы измерительной схемы (ИС) 6, включающую канал 7 определения рабочего сектора (канал грубого отсчета) измеряемого угла ψ, канал 8 точного измерения угла в рабочем секторе и канал 9 измерения величины W скорости ветра. Выходные сигналы указанных каналов подаются на входы вычислительного устройства (ВУ) 10, который по результатам обработки входной информации выдает цифровые коды Nψ и NW по углу ψ направления и скорости W ветра. Вычислительное устройство также формирует сигнал FГМ запуска генератора ионных меток. При попадании траектории ионной метки в i-ый грубый канал текущее значение измеряемого угла ψ определяется как ψ=iα0+αр, (1) где α0 – угол, охватывающий рабочий сектор грубого канала отсчета (при imax = 4, α0 = 90°); i – номер сектора (i = 1,4 ); αр – значение измеряемого угла в пределах i-го рабочего сектора. Сигналы, пропорциональные синусу Asinαi и косинусу Acosαi измеряемого угла в i-ом рабочем секторе грубого канала и снимаемые с блока предварительных усилителей, обрабатываются в вычислительном устройстве, на выходе которого выдается цифровой код, связанный со значение αр измеряемого угла в пределах рабочего сектора точного канала соотношением p arctg A sin i , A cos i (2) где α i – текущее значение измеряемого угла в пределах i-го рабочего сектора. При работе канала измерения величины (модуля) скорости вектора ветра W формируется интервал времени τW пролета ионной метки расстояния R от точки 0 генерации ионной метки до окружности с приемными электродами. В соответствии с интервалом времени τW в вычислительном устройстве вырабатывается цифровой код NW, пропорциональный величине скорости ветра R W . (3) W В меточном датчике аэродинамического угла и воздушной скорости реализуется кинематический метод измерения величины (модуля) и угла направления вектора ветра, при котором точность измерения угла ψ направления и скорости W ветра не зависит от состояния окружающей среды (температуры, атмосферного давления, плотности, влажности и т.п.). Для восприятия информации результирующего воздушного потока вихревой колонны несущего винта на поверхности полусферического аэрометрического приемника 11 (рисунок) расположены отверстия 12 для забора полного давления РПΣ результирующего воздушного потока вихревой колонны несущего винта, отверстия 13, 14 и 15, 16 для забора давлений Р1, Р2 и Р3, Р4, определяющих углы φ1 и φ2 положения вектора скорости V относительно оси симметрии полусферического приемника в плоскости параллельной продольной оси вертолета и в плоскости перпендикулярной продольной оси вертолета, а также отверстия 17 для забора статического давления РСТΣ результирующего воздушного потока вихревой колонны несущего винта. Воспринимаемые давления РПΣ , Р1, Р2 и Р3, Р4, РСТΣ с помощью пневмоэлектрических преобразователей перепада давлений 18 и преобразователя абсолютного давления 19 преобразуются в электрические сигналы, которые через канал 20 аналого-цифрового преобразования, включающего мультиплексор 21 и АЦП 22 подаются в вычислительное устройство 10, на выходе которого формируются цифровые сигналы по скорости W и углу направления ψ вектора ветра. На стоянке при запуске силовой установки и вращении несущего винта вектор скорости VΣ результирующего воздушного потока вихревой колонны несущего винта можно представить в виде геометрической суммы вектора скорости ветра W и стационарной составляющей Vi 0 вектора скорости воздушного потока, создаваемого несущим винтом, т.е. VΣ = W + Vi 0 ; W V Vi 0 . (4) Для конкретного типа вертолета и места установки неподвижного пространственно распределенного датчика воздушных сигналов с аэрометрическими и ионно-меточными измерительными каналами на фюзеляже вертолета составляющие Vix, Viy, Viz вектора Vi 0 скорости индуктивного потока вихревой колонны несущего винта в связанной системе координат можно описать уравнениями вида [5] Vix = Kix Vi0 ; где Vi 0 Gn y Viy = Kiy Vi0 ; Viz = Kiz Vi0 , (5) – модуль вектора Vi 0 скорости индуктивного потока несущего винта на 2 Н F режиме висения; Kix, Kiy, Kiz – безразмерные коэффициенты, функционально связанные с параметрами режима полета и определяемые при летных испытаниях данного типа вертолета для конкретного места установки датчика воздушных сигналов; G – вес вертолета; 1 d 2 H ny – нормальная перегрузка n y 1 ; ρН – плотность воздуха на данной высоте Н; g dt 2 F – площадь, ометаемая несущим винтом вертолета; χ – коэффициент заполнения диска несущего винта; g = 9,80665 – ускорение свободного падения. Величину (модуль) вектора скорости V результирующего воздушного потока вихревой колонны несущего винта можно определить по полному РП и статическому РСТ давлениям и температуре Т Т торможения результирующего воздушного потока вихревой колонны несущего винта, воспринимаемой приемником температуры торможения, установленного на фюзеляже в зоне действия вихревой колонны несущего винта, используя соотношение [6]: 0, 2857143 P P П СТ TТ 1 1 РСТ , V 44,826 0, 2857143 PП PСТ 1 РСТ (6) где параметры, входящие в формулу (3) имеют размерности в единицах системы СИ. Проекции вектора V скорости результирующего воздушного потока вихревой колонны несущего на оси связанной системы координат определяются как VΣx = VΣsinφ1 ; VΣy = VΣcosφ1cosφ2 ; V Σz = V Σsinφ2. (7) где φ1 и φ2 – углы, определяющие положение вектора скорости V результирующего воздушного потока вихревой колонны несущего относительно осей полусферического аэрометрического приемника, которые определяются по давлениям Р1, Р2 и Р3, Р4. Используя соотношения для определения давления на поверхности полусферического аэрометрического приемника, приведенные в работе [7], углы φ1 и φ2, определяющие положение вектора скорости V результирующего набегающего воздушного потока вихревой колоны несущего винта, будут определяться соотношениями Р3 Р4 1 4 Р1 Р2 1 4 ; 2 arcsin , (8) 1 arcsin 2 2 9 sin 201 РП РСТ 9 sin 202 РП РСТ где φ10 и φ20 – углы расположения отверстий для забора давлений Р1, Р2 и Р3, Р4. Тогда в соответствии с выражениями (5) – (8) продольная Wx, боковая Wz составляющие и модуль (величина) Wг горизонтального ветра W на стоянке при запуске силовой установки и вращении несущего винта будут определяться как: 4 Р1 Р2 Wx V KixVi 0 ; 9 sin 201 РП РСТ 4 Р3 Р4 (9) KizVi 0 ; 9 sin 202 РП РСТ W Wг Wx2 Wz2 ; arctg z , Wx Таким образом, по давлениям Р1, Р2 и Р3, Р4, РПΣ и РСТΣ, воспринимаемым на поверхности осесимметричного, например полусферического аэрометрического приемника, и температуре ТТΣ торможения результирующего воздушного потока вихревой колонны несущего, используя соотношения (9) можно определить параметры вектора скорости ветра W на стоянке при запуске силовой установки и вращении несущего винта. На режиме руления и маневрирования вертолета по земной поверхности в качестве исходного уравнения для определения параметров вектора скорости ветра вместо Wz V выражения (4) необходимо использовать соотношение V W Vi 0 Vр , (10) где Vр – вектор скорости руления и маневрирования вертолета по земной поверхности, продольная Vрх и боковая Vрz составляющие которого можно определить, используя информацию от спутниковой навигационной системы, установленной на вертолете. Тогда, используя соотношения (5) – (10), выражения для определения продольной Wx и боковой Wz составляющих и величина (модуль) Wг горизонтального ветра Wг при рулении и маневрировании по земной поверхности будут иметь вид 4 Р1 Р2 Wx V KixVi 0 Vрx ; 9 sin 201 РП РСТ Wz V 4 Р3 Р4 KizVi 0 Vрz ; 9 sin 202 РП РСТ Wг Wx2 Wz2 ; arctg (11) Wz , Wx где θД – угол наклона диска несущего винта. На взлетно-посадочных режимах вертолета в качестве исходного уравнения для определения параметров вектора скорости ветра вместо выражения (4) необходимо использовать соотношения вида (12) V Vв Vi с , Vв = W Vп . где Vв – вектор истинной воздушной скорости вертолета ( Vв = V ); V п – вектор путевой скорости вертолета, параметры которого определяются доплеровским измерителем скорости и угла сноса (ДИСС); V – вектор скорости воздушного потока, набегающего на неподвижный полусферический аэрометрический приемник. Поскольку неподвижный панорамный ионно-меточный датчик аэродинамического угла и истинной воздушной скорости с установленным над его системой приемных электродов полусферическим аэрометрическим приемником расположенном на фюзеляже на определенном радиус-векторе R от центра масс вертолета, то при вращении вертолета относительно центра масс имеет место кинематическое искажение вектора скорости V воздушного потока, набегающего на аэрометрический приемник, которое определяется векторным уравнением вида Vк V ω R ( x, y, z ) , (13) где Vк – кинематически искаженный вектор скорости набегающего воздушного потока в месте установки неподвижного комбинированного аэрометрического приемника; ( x , y , z ) – вектор угловой скорости вращения вертолета относительно центра масс; x , y , z – угловые скорости вращения вертолета относительно осей связанной системы координат; x, y, z – координаты места установки неподвижного панорамного меточного датчика аэродинамического угла и воздушной скорости с установленным над его системой приемных электродов полусферическим аэрометрическим приемником в связанной системе координат, центр которой находится в центре масс вертолета. Проекции вектора скорости Vк на оси связанной системы координат будут определяться системой уравнений вида Vкx=Vx+(ωyz‒ωxy); Vкy=Vy+(ωzx‒ωxz); Vкz=Vz+(ωxy‒ωyx), (14) где Vx, Vy, Vz – проекции вектора истинной воздушной скорости Vв на оси связанной системы координат. Продольная Vx и боковая Vz составляющие и величина (модуль) Vв вектора истинной воздушной скорости Vв , углы атаки α и скольжения β вертолета, статической давление РН и барометрическая высота Н буду определяться соотношениями [5]: 1 4 Р1 Р2 Vx V sin arcsin 9 sin 201 РП РСТ 2 1 4 Р3 Р4 KixVi 0 ( y z x y ); cos arcsin 9 sin 202 РП РСТ 2 1 Р3 Р4 4 K izVi 0 ( x y y x); Vz V sin arcsin 2 9 sin 2 Р Р 02 П СТ Vв Vx2 V y2 Vz2 ; arctg V2 PH РСТ K P ; 2 РСТ 287,05287 Т Т Vy Vx ; T0 PH Н 1 P0 PП РСТ (15) V arsin z , VВ R , 0, 2857143 где Р0 = 101325 Па и Т0 = 288,15 К – абсолютное давление и абсолютная температура на высоте Н=0 стандартной атмосферы; R – удельная газовая постоянная воздуха (R=287,05287 Дж/кгК); τ – температурный градиент (τ=0,0065 К/м); Кр – безразмерный коэффициент, определяющий связь РСТΣ и РН, который определяется при летных испытаниях для конкретного типа вертолета и места установки на фюзеляже неподвижного панорамного меточного датчика аэродинамического угла и воздушной скорости с установленным на нем осесимметричным полусферическим аэрометрическим приемником; Kiy – безразмерный коэффициент, определяемый аналогично Kix и Kiz. Используя информацию о величине Vп и угле сноса ψс вектора путевой скорости V п от доплеровского измерителя скорости и угла сноса и составляющих вектора истинной воздушной скорости Vв , продольная Wx, боковая Wz составляющие, величина (модуль) W и направление ψ горизонтального вектора ветра W на взлетно-посадочных режимах вертолета определяются соотношениями: Wx = |Vx| ‒ Vп cosψc; Wz = |Vz| ‒ Vп sinψc; ψ = β + ψс; Wг Wx2 Wz2 . (16) Таким образом, используя информацию, воспринимаемую неподвижным датчиком воздушных сигналов, выполненном в виде неподвижного панорамного ионно-меточного датчика аэродинамического угла и воздушной скорости с установленным над его системой приемных электродов полусферическим приемником, в вычислительном устройстве, выполненным в виде вычислителя, реализующего алгоритмы (1) – (3), (6), (9), (11), (16), определяются параметры вектора скорости ветра на стоянке до запуска силовой установки, на стоянке при запуске силовой установки и вращении несущего винта, при рулении и маневрировании по земной поверхности, при взлете, снижении, висении и посадке вертолета. Построенная на основе ионно-меточных и аэрометрических измерительных каналов бортовая система измерения параметров вектора ветра обладает расширенными функциональными возможностями и областью применения. Применение бортовой системы измерения параметров вектора ветра на вертолетах различного класса и назначения позволяет повысить безопасность их эксплуатации на стоянке, стартовых и взлетно-посадочных режимах, что имеет существенное значение для гражданской и военной авиации. СПИСОК ЛИТЕРАТУРЫ 1. Ерусалимский М.А., Егоров В.Н. Экипажам вертолетов – информационную поддержку // Авиасоюз. – 2011. - №2. – С. 24 – 26. 2. Руководство по летной эксплуатации вертолета Ми-8 (издание 4-ое). – М.: Авторитет. – 1996. – 554 с. 3. Ганеев Ф.А., Солдаткин В.М. Ионно-меточный датчик аэродинамического угла и воздушной скорости с логометрическими информативными сигналами и интегрированной схемой обработки // Известия вузов. Авиационная техника. – 2010. – №3. – С. 46 – 50. 4. Солдаткин В.М. Методы и средства измерения аэродинамических углов летательных аппаратов. – Казань: Изд-во Казан. гос. техн. ун-та. 2001. – 448с. 5. Козицин В.К. Алгоритмическое обеспечение системы воздушных сигналов вертолета на основе свободно ориентированного приемника давлений // Известия вузов. Авиационная техника. – 2006. – №4. – С. 52 – 57. 6. Солдаткин В.В. Система воздушных сигналов вертолета на основе неподвижного аэрометрического приемника и информации аэродинамического поля вихревой колонны несущего винта: Монография. – Казань: Изд-во Казан. гос. техн. ун-та. 2012. – 284с. 7. Петунин А.Н. Методы и техника измерения параметров газового потока (Приемники давления и скоростного напора). – М.: Машиностроение. 1972. – 332с. Арискин Евгений Олегович Казанский национальный исследовательский технический университет им. А.Н. Туполева-КАИ Магистрант кафедры «Приборы и информационно-измерительные системы» Тел.: +7-960-042-52-57 E-mail: [email protected] Никитин Александр Владимирович Казанский национальный исследовательский технический университет им. А.Н. Туполева-КАИ Ассистент кафедры «Приборы и информационно-измерительные системы» Тел.: +7-987-220-50-20 E-mail: [email protected] Солдаткин Вячеслав Владимирович Казанский национальный исследовательский технический университет им. А.Н. Туполева-КАИ Д.т.н., доцент, доцент кафедры «Приборы и информационно-измерительные системы» Тел.: +7-917-289-06-75 E-mail: [email protected] Солдаткин Владимир Михайлович Казанский национальный исследовательский технический университет им. А.Н. Туполева-КАИ Д.т.н., профессор, заведующий кафедрой «Приборы и информационно-измерительные системы» Тел.: +7-987-290-81-48 E-mail: [email protected]