Вводное занятие по технике безопасности
реклама

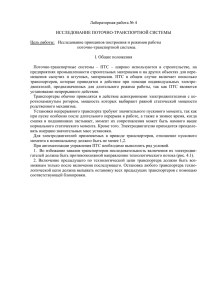
Вводное занятие по технике безопасности 1. Виды воздействия тока на организм человека a) термическое - проявляется в ожогах участков кожи; b) механическое - разрыв мышечной ткани; c) электролитическое - проявляется в разложении органической жидкости; d) биологическое - проявляется в раздражении и возбуждении живых тканей организма и нарушении внутренних биологических процессов. 2. Виды электрических травм Разделяют травмы на две группы: местные электротравмы; электрические удары. К местным электротравмам относятся: электрический ожог (проникновение тока через тело человека); электрические знаки (представляют собой резко очерченные омертвевшие участки кожи); металлизация кожи - это проникновение в верхние слои кожи мельчайших частиц металла; механические повреждения (резкие судорожные сокращения мышц); электрофтальмия (воспаление наружных оболочек глаз). Под электрическими ударами понимают возбуждение живых тканей организма протекающим через них током. Электрические удары делят на: 1. Судорожное слабое сокращение мышц (проявляется при токе 1.1 мА, f = 50 Гц). 2. Судорожное сокращение мышц, сопровождаемое сильными болями, без потери сознания (при токе от 3-5 мА) 3. Судорожное сокращение мышц с потерей сознания, но с сохранившимся дыханием и работой сердца (при токе от 25 мА). 4. Потеря сознания и нарушение сердечной деятельности или дыхания (50 мА). 5. Клиническая смерть. 3. Электрический ток - основной поражающий фактор При прохождении электротока поражающим фактором является ток, проходящий через тело. Сопротивление человеческого тела зависит от: 1) состояния кожного покрова. Величина сопротивления кожи резко уменьшается при: повреждении его рогового слоя (ссадины, порезы): увлажнении кожи (при увлажнении резко увеличивается токопроводимость); загрязнение кожи различными длительность пропускания тока. веществами, в особенности электролитами. 2) Прохождение тока вызывает нагрев кожи и оказывает раздражающее действие на ткани. В нашей стране принято в качестве сопротивления человеческого тела 1000 Ом при напряжении свыше 50 В. Считая его неизменным при заданном значении напряжения (U=220B), можно определить величину тока, проходящего через тело человека: I= = 220 / 1000 = 220 мА -- опасное для человека значение. 4. Инструктаж по технике безопасности для студентов, работающих в лабораториях электротехники и автоматики Во избежание несчастных случаев, связанных с поражением электротоком, необходимо соблюдать следующие факторы: 1. Каждый студент должен находиться на том рабочем месте, которое ему указано в начале занятий. 2. Перед началом выполнения работ студент обязан: - освободить рабочее место от ненужных приборов, сумок и т.п.; - изучить методические указания к лабораторным работам. 3. Запрещается собирать схему лабораторной установки без разрешения преподавателя. 4. Запрещается включать лабораторную правильности сборки схемы. установку без проверки преподавателем 5. В процессе проведения лабораторной работы запрещается: работать влажными руками; касаться движущихся и вращающихся частей электроустановок; самостоятельно устранять неисправности лабораторных стендов, если они возникли при выполнении экспериментов; делать пересоединения в схемах лабораторных установок, если они находятся под напряжением; разбирать схемы лабораторных установок по электрическим машинам до полной остановки двигателя: касаться неизолированных частей установок. 6.Если есть неисправность в лабораторной установке, необходимо немедленно отключить стенд. 7.После окончания лабораторной работы необходимо: a) отключить питание лабораторного стенда; b) получить разрешение преподавателя на разборку схемы; c) отсоединить провода схемы лабораторной установки от клемм питающей сети; d) разобрать оставшуюся часть схемы. 8. Каждый лабораторный стенд имеет свою отключающую питание аппаратуру. 9. При возникновении пожара студенту следует немедленно отключить питание стендов и покинуть лабораторию. 10. Студент получает допуск к лабораторной работе только после получения инструктажа на рабочем месте. 11. Студент, нарушивший настоящую инструкцию, немедленно отстраняется от работы в лабораториях. 5. Правила оказания первой помощи пострадавшим от электротока. Оказание первой помощи включает в себя два этапа. освобождение пострадавшего от действия электротока; оказание пострадавшему доврачебной медпомощи. При поражении электротоком необходимо: 1) немедленно отключить электроустановку, которой касается пострадавший. Вызвать врача. 2) определить состояние пострадавшего, проверить наличие дыхания и сердечных сокращений. 3) если пострадавший в сознании, но был в обмороке, то необходимо: - удобно уложить на сухую подстилку; - укрыть пострадавшего сверху одежды; - удалить лишних людей из помещения. 4) если без сознания, но есть пульс: - уложить на подстилку; - расстегнуть одежду и пояс; - обеспечить приток свежего воздуха; - растереть тело и дать понюхать спирт или нашатырь; - обеспечить полный покой; 5) если плохо дышит - сделать искусственное дыхание, но прежде: - освободить от стесняющих дыхание предметов одежды; - уложить на спину; - запрокинуть голову; 6) при отсутствии признаков жизни приступить к искусственному дыханию и массажу сердца. Во всех случаях констатировать смерть имеет право только врач. Токи воздействия на человека: 10 мА - покалывающий ток 15 мА - неотпуекающий ток 100 мА - опасный ток (воздействие на грудную клетку, удушье) 250 мА - ток фибрилляции - останавливается сердце Большие токи вызывают ожоги - состояние человека зависит от площади поражения. Лабораторная работа №2 «Исследование схемы электроприводов с асинхронным электродвигателем» Цель работы: 1. Изучить аппаратуру управления и защиты трехфазного асинхронного электродвигателя: от короткого замыкания, режима асимметрии, от режима перегрузки. 2. Исследовать реверсирование, блокировки и ограничения; 3. Изучить схемы согласования напряжений силовой цепи и цепи управления с учетом требований техники электробезопасности. Основные положения Электрическая цепь, по которой осуществляется подача электроэнергии от трехфазной сети к асинхронному двигателю, называется силовой цепью электропривода. Электрическая схема этой цепи называется схемой силовой цепи. Необходимый режим работы асинхронного электродвигателя в той или иной установке обеспечивается электрическими аппаратами цепи управления. Функции этой цепи заключаются в осуществлении пуска, остановки, реверсирования и защиты двигателя. Поэтому в электрической схеме цепи управления находятся магнитные пускатели, контакторы, кнопки управления, различные реле и аппараты защиты. Электрическая схема простейшего нереверсивного электропривода с асинхронным двигателем показана на рис. 2.1. Лабораторная установка представляет собой действующую модель реверсивного электропривода с асинхронным двигателем (рис. 2.2, 2.3.). В состав лабораторной установки входят асинхронный электродвигатель с короткозамкнутым ротором М, автоматический трехфазный выключатель QF, плавкие предохранители FU, выключающая кнопка SBT «Стоп», включающая кнопка SBC1 «Вперед» (вращение электродвигателя по часовой стрелке), включающая кнопка SBC2 «Назад» (вращение электродвигателя против часовой стрелки), магнитные пускатели КМ1 «Вперед» и КМ2 «Назад», концевые выключатели SQ1 и SQ2 для ограничения угла поворота механизма, сигнальные лампочки HL1, HL2, HL3. Магнитные пускатели КМ1 и КМ2 объединены конструктивно в одном корпусе. Одновременно их включить невозможно. Вывод Нагрузка двигателя считается симметричной. В процессе эксплуатации из-за больших пусковых токов возникают короткие межвитковые замыкания. Нейтраль смещается, возникает режим асимметрии, которая развивается в межфазовое КЗ. Защита от КЗ осуществляется с помощью плавкого предохранителя FU. На оставшихся двух фазах напряжение увеличивается в √3 раза. Защита от асимметрии (см. рис. 2.2) осуществляется с помощью защитного диодного моста на нулевой точке, у которой появляется потенциал. При токе 12 мА катушка отключения срабатывает, размыкает свой нормально замкнутый контакт KL в цепи управления, магнитный пускатель отключает все три фазы двигателя, а замыкающий блок-контакт подает сигнал электрику. Защита от режима перегрузки осуществляется с помощью тепловых реле КК1, КК2. Увеличение механического момента вызывает возрастание силы тока в цепи; нагревательные элементы реле включены в силовую цепь двигателя и контролируют значение рабочего тока, а нормально замкнутые контакты КК1 и КК2 включены в цепь управления последовательно с обмотками магнитных пускателей. Реле реагирует на избыточное выделение энергии (20% перегрузки в течение 1мин). Необходимо и достаточно двух реле, т.к. выполняется логическая операция «или - нет». Для реверсирования асинхронного двигателя необходимо и достаточно поменять местами любые две фазы. Для защиты от КЗ силовой цепи используются нормально замкнутые блок контакты КМ 1.5, КМ 2.5. Если один из пускателей под током, он своим контактом размыкает цепь другого магнитного пускателя. Для согласования напряжений питания силовой цепи и цепи управления используют понижающие котельные трансформаторы, вторичная обмотка которых заземляется. Лабораторная работа №3 «Командный электропневматический прибор КЭП-12У» Цель работы: изучить устройство, принцип работы и порядок настройки прибора КЭП-12 У. Построить циклограмму настройки прибора. Прибор КЭП-12У (рис. 3.1) предназначен для формирования команд, определяющих последовательность и продолжительность различных технологических операций. Прибор является безрефлексной системой программного управления технологическим процессом, так как отсутствует обратная связь с регулируемым технологическим параметром. Применяется в циклических производственных процессах, например, в пропарочных камерах при тепловой обработке железобетонных изделий, в бетоносмесительных цехах, при регенерации ионитных фильтров водоочистки в котельных установках и др. Основными элементами прибора КЭП-12У являются синхронный электродвигатель (U=127 В, Р=40Вт) и распределительный вал с кулачками. Электродвигатель осуществляет привод распределительного вала через редуктор с постоянным передаточным числом, храповой расцепляющий механизм (находится внутри колокола редуктора) и четырехступенчатую коробку скоростей. Цена одного деления пороговой шкалы верхнего колокола, который вращается вместе с распределительным валом: где А - число делений круговой шкалы верхнего колокола: Тц - продолжительность цикла (мин, с, ч). Число делений А1 и А2 шкалы верхнего колокола соответствует времени начала Т1} и времени окончания Т2 конкретной операции цикла: Выводы КЭП-12У - командный электропневматический прибор имеет 6 - пневматических, 6 - электрических цепей. Он является программным задатчиком. По принципу действия - САР безрефлексная, т.е. отсутствует обратная связь с регулируемым производственным параметром, поэтому требуется наличие оператора. С помощью нижнего колокола и редуктора задается время цикла - 1 полный оборот распределительного вала: от 3 мин. до 18 ч. С помощью верхнего колокола и распределительного вала задается начало (в левую канавку вкл.) и конец (отключ. в правую), т. е. продолжительность и последовательность операций программа. Достоинство - высокая надежность. Недостаток - сложность конструкции. Применяется в бетоносмесительных узлах, пропарочных камерах, во всех циклических производственных процессах. Лабораторная работа №4 «Исследование поточно-транспортной системы» Цель работы: исследование принципа построения и режимов работ поточно-транспортной системы. ПТС широко используется в строительстве, на предприятиях промышленности строительных материалов и на других объектах для перемещения сыпучих и штучных материалов. ПТС в общем случае включает в себя несколько транспортеров, которые приводятся в действие при помощи индивидуальных электродвигателей, предназначенных для длительного режима работ, т. к. ПТС являются установками непрерывного действия (рис. 4.1). Транспортеры приводятся в действие асинхронными электродвигателями с короткозамкнутым ротором, мощность которых выбирают равной статической мощности производственного механизма. Установка непрерывного транспорта требует значительного пускового момента, т. к. при пуске, особенно после длительного перерыва в работе и в зимнее время, когда смазка в подшипниках застывает, момент их сопротивления может быть значительно выше нормального статического момента. Кроме того, электродвигателю приходится преодолевать инерцию значительных масс установки. Для электродвигателей, применяемых в приводе транспортеров, отношение пускового момента к номинальному должно быть не менее 1,2. Основными элементами схемы управления являются: магнитные пускатели КМ 1, 2, 3, реле времени КТ1,2,3, промежуточное реле К1, звуковой сигнализатор НА, выключатели кнопочные на вкл. SBC 1, 3, 5, 7, выключатели на откл. SBT 2, 4, 6, 8, универсальный переключатель SA2, выключатель SA1, для подачи напряжения на схему управления, сигнальные лампы EL 1, 2, 3, главный предохранитель FU, контакт реле электротеплового КК. Режим работы определяется положением SA2, который имеет три положения: 1 - режим дистанционного управления, замкнутые четные цепи 2, 4, 6, 8; 2 - все цепи управления разомкнуты; - автоматический режим, замкнуты нечетные цепи 1, 3, 5, 7 и цепь сигнализации 8. Выводы Универсальный переключатель SA2 в положении 2 - все цепи управления разомкнуты. УП в положении 1 - замкнуты четные цепи; обеспечивает: включение электродвигателей транспортеров в любой последовательности с помощью пусковых кнопок SBC 3, 5, 7 в любой последовательности, используется при ремонтах или требованиях к технологии. Остановка производится кнопками SBT 4, 6, 8. УП в положении 3 - замкнуты нечетные цепи управления, обеспечивает: включение ПТС одной кнопкой SB1, под ток становятся: звуковой сигнал НА, контактор KL шунтирующий пусковую кнопку, и реле времени КТ1 (рис. 4.2). НА - звуковая сигнализация обеспечивается выдержкой КТ1, для предупреждения обслуживающего персонала о предстоящем запуске ПТС в автоматическом режиме по требованиям техники безопасности. Ступенчатый пуск электродвигателей из-за больших пусковых токов КТ2, КТЗ. Обратная последовательность пуска транспортера перемещаемому грузу с целью исключения завалов. Световая сигнализацию работы двигателей HL 1, 2, 3. Система аварийного отключения SBT2, Работа ПТС - непрерывный технологический процесс, поэтому предусмотрены блокировки включения резервных транспортеров. Лабораторная работа №5 «Исследование системы двухпозиционного автоматического регулирования температуры с манометрическим термометром» Цель работы: изучить приборы и принцип работы системы двухпозиционного автоматического регулирования температуры с манометрическим термометром. 1. Общие положения Регулирования параметров технологического процесса выполняется с помощью различных регуляторов: пропорциональных (П), пропорционально-интегральных (ПИ), пропорционацьноинтегрально-дифференциальных (ПИД), релейных, позиционных. При жестких требованиях, предъявляемых к системам автоматического регулирования, применяются ПИ и ПИД- регуляторы. Они способны точно поддержать на заданном значении параметр регулирования. Когда в технологическом процессе допускается возможность изменения значений параметров регулирования в пределах некоторого диапазона, применяют позиционные регуляторы. Позиционным, называется регулятор, при помощи которого регулирующий орган (клапан, заслонка, задвижка, контакты реле и т.п.) занимает вполне определенное положение (позиции). Применяются двух- и трехпозиционные регуляторы. Для двухпозиционных систем регулирования характерно два положения регулирующего органа (открыто-закрыто, включено-отключено). При трехпозиционном регулировании регулирующий орган кроме крайних положения может еще занимать среднее положение (нормально). Качество позиционного регулирования оценивается по среднему значению и амплитуде отклонения регулируемой величины в установившемся режиме. При заданном диапазоне изменение регулируемого параметра оценивается теоретическими величинами Т\ и T2. Вследствие инерционности системы в реальных условиях величины Х\ и т2 принимают значения ттах и xmin. При настройке двухпозиционного регулятора необходимо выполнить условие: где τ* - заданное при настройке среднее значение регулируемого параметра. Величина ε = τ2 — τ1- называется зоной нечувствительности позиционности регулятора. Точность работы позиционного регулятора характеризуется ошибкой по формуле: Величины τmin и τmах, а следовательно, и статическая ошибка Δτст тем больше, чем больше зона нечувствительности и инерционность регуляторов. Принцип работы манометрического термометра основан на изменении давления жидкости или газа, находящегося в замкнутом внутреннем объеме при изменении температуры. Работа таких термометров подчиняется закону Менделеева-Клапейрона: PV=MRT, где Р - давление манометрической жидкости массой М внутри системы объемом V; R - универсальная газовая постоянная; Т - абсолютная температура манометрической жидкости. Из этой формулы очевидна пропорциональная зависимость между абсолютной температурой и давлением. 2. Описание лабораторной установки На рис.5. 2. показана электрическая схема установки двухпозиционного регулирования температуры с манометрическим термометром. Основными элементами установки являются: нагревательный элемент ЕК (электроплитка), манометрический сигнализирующий и ПЗрегулирующий термометр типа ТС-100 с контактами SK1 и SK2, электромагнитные реле К1 и К2, кнопки дистанционного управления SB1 и SB2, сигнальные лампы EL1 и EL2, переключатель S2, дистанционное управление - «автоматика», выключатель S1. При дистанционном режиме управления схема работает следующим образом: переключатель S2 устанавливается в положение 1, с помощью выключателя S1 на схему подается питание напряжением 220 В. Дальнейшее управление осуществляется пусковой кнопкой SB1, при нажатии которой по цепи, состоящей из SB1, кнопки «стоп» SB2 и катушки электромагнитного реле К1, протекает ток. Реле K1 срабатывает, замыкается контакт К 1.1, что позволяет отпустить кнопку SB1. Замыкание контакта К 1.2 включает лампу EL1, размыкание контакта К 1.3 отключает лампу EL2. Контакт К 1.4 включает электрический нагреватель ЕК под напряжение. Отключение электронагревателя осуществляется с помощью кнопки SB2, которая разрывает цепь питания катушки К1 (рис. 5.3). При автоматическом режиме управления переключатель S2 устанавливается в положение 3. При этом режиме управление схемой определяется состоянием контактов SK1 и SK2, зависящим от температуры объекта регулирования, т.е. включается нагреватель ЕК и регистрируются значения температуры, которые сводятся в таблицу. ----- ! т, °с ---- 30 t 0 8,55 18 40 11 50 12 min 60 14 33 54 max 65 15 30 37,20 47,30 70 15,35 28,30 38,40 [45,3 0 80 17 21 85 20 Вывод По принципу действия - САР рефлексная, т.е. с жесткими обратными связями. При достижении максимальной заданной температуры действует ООС, САР отключается, а при достижении минимальной температуры действует ПОС, САР включается,- в результате человек исключен из процесса управления. Главное достоинство: имеется участок характеристики с отключенным нагревательным элементом, экономия теплоэнергетических ресурсов. Используется в нагревателях битума, скользящих опалубках ЖБИ и т.п. Недостатки: неравномерная шкала, точность ±5°С. Очень большая инерционность, что приводит к дополнительным потерям. Отсутствует обратная связь; с независимыми параметрами (температура окружающей среды, ход технологического процесса).