Адаптивные ПИД-регуляторы с пробным гармоническим сигналом для управления техническими объектами
реклама

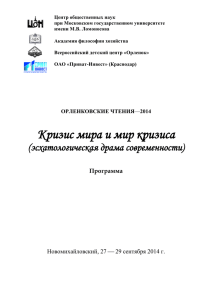
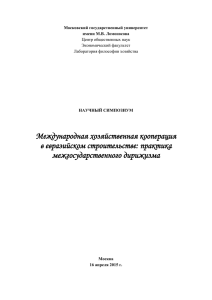
Адаптивные ПИД-регуляторы с пробным гармоническим сигналом для управления техническими объектами Назначение и область примерения: Область применения данного алгоритма определяется широким классом нестационарных технологических процессов с любой величиной запаздывания в каналах измерения и управления (желательно с плавными частотными характеристиками). Основное ограничение – опасность возбуждения объекта на резонансных частотах, т.е. алгоритм не применим для острорезонансных объектов. Реализация алгоритма возможна в программном и аппаратном виде. Потенциальные потребители: Предприятия, занимающиеся разработкой промышлееных управляющих контроллеров, другие предприятия приборостроения, использующие ПИД-закон управления. Фирмы, занимающихся системной интеграцией в сфере промышленной автоматизации, отделов АСУ на крупных промышленных предприятиях и научноисследовательских институтов, научных коллективов ВУЗов, разрабатывающих системы контроля и управления. Научно-техническое описание: Построение адаптивных систем управления является одной из наиболее важных и бурно развивающихся в теории управления областей. Это отражает объективную тенденцию развития современных систем управления объектами с переменными параметрами. В настоящее время при управлении технологическими процессами нашли широкое применение цифровые ПИД-регуляторы. Расчет их настроек обычно проводят квалифицированные наладчики. Однако, с течением времени характеристики многих объектов могут меняться, нивелируя трудовые затраты на настройку регуляторов. Таких объектов управления в промышленности по последним данным насчитывается около 15% и их можно отнести к объектам с переменными (или нестационарными) параметрами. Дрейф параметров может вызываться рядом факторов: сменой нагрузки на технологический агрегат или задания регулятору; изменением состава или качества сырья, используемого в процессе; старением оборудования (например, старение катализатора, увеличение накипи в теплообменниках, выгорание футеровки печей и т. д.); влиянием окружающей среды, связанной со сменой времен года; реконструкцией или заменой части оборудования, входящего в технологический комплекс и т. д. Современные цифровые контроллеры, оснащенные блоками автонастройки, частично решают задачу управления такими объектами путем эпизодического включения автонастройки. Однако, момент повторного включения настройки зачастую неизвестен. Поэтому актуальной, одной из важнейших научно-технических задач, является задача построения цифровых адаптивных ПИД-регуляторов, способных непрерывно парировать дрейф динамических характеристик объекта. Функционирование предприятий в условиях жесткой рыночной конкуренции требует снижения издержек на этапе проектирования и при производстве пуско-наладочных работ, то есть применение самонастройки одновременно для многочисленных контуров регулирования, составляющих современные комплексы АСУ. А именно на этапе пусконаладки наиболее ярко проявляется нестационарность характеристик объектов управления, что также обосновывает применение систем непрерывной настройки и внедрение их в промышленные контроллеры и средства компьютерного проектирования АСУ ТП. Учитывая вышесказанное, на основе активных частотных методов самонастройки разработана структурная схема (рис. 1) и алгоритм работы адаптивного цифрового ПИДрегулятора с настройкой по одной точке АФХ объекта управления /4-6/. Расчет настроек ПИД-регулятора ведется по «характерным» точкам АФХ объекта. Предложено в качестве новой характерной точки рассматривать точку с фазовым сдвигом –2.11 рад. Доказано, что расчет параметров регулятора по вектору АФХ с аргументом –2.11 рад позволяет получать настройки, близкие к оптимальным в смысле минимума СКО регулирования, причем даже для объектов с большим запаздыванием. Настройка в замкнутом контуре осуществляется путем подачи на вход объекта, наряду с управляющим Uр пробного сигнала Uг с генератора синусоидальных колебаний. Фильтр Фурье 1 оценивает значения амплитуды Rв х и фазы в х пробных колебаний в сигнале управления U. Фильтр Фурье 2 оценивает Rв ых и вых в выходном сигнале Y объекта. Соответственно вычислитель АФХ определяет вектор комплексной характеристики объекта Rо , о на частоте тестового сигнала . Поиск и дальнейшее отслеживание частоты, на которой фазовый сдвиг о равен з=–2.11 рад, осуществляет БФАЧ. Вычислительный блок производит расчет настроек ПИД-регулятора при захвате БФАЧ фазы –2.11 рад: k р 0.7 / Ro ( j ); Tи N j / 3.5; Tд Tи / 4 , где Nj=2/(Tq) – нормированный период пробных колебаний, j – номер текущего цикла адаптации. Настройки ПИД-регулятора также нормированы по периоду квантования Tq. Блок вычисления АФХ находит текущую оценку положения вектора АФХ объекта: Rо ( j ) Rвых ( j ) Rв х ( j ) , о ( j ) вых ( j ) в х ( j ) . Рис. 1. Представленные выше алгоритмы адаптивных ПИД-регуляторов внедряются на промышленных предприятиях. В частности была разработана программная реализация адаптивного ПИД- и ПДД-регулятора с настройкой по вектору АФХ объекта управления в виде FBD-модуля (рис. 2). Модуль применяется в редакторе базы каналов в среде SCADA системы «Trace Mode». Рис.2. Рис.3. Модуль, реализующий адаптивный алгоритм управления, работает в нормированном времени. Нормировка осуществляется по величине периода квантования (опроса) для данного канала. Необходимость нормировки объясняется тем, что величина периода квантования устанавливается монитором реального времени SCADA системы автоматически, в зависимости от информационной нагрузки на систему. Численное значение периода квантования часто неизвестно. В связи с этим, все используемые математические соотношения блоков системы были нормированы. Разработанные модули включаются в поставку SCADA TRACE MODE пятой и шестой версий, а также в новый высокотехнологичный программный продукт Micro TRACE MODE 6 м адаптивным регулированием для контроллеров МФК, КРУИЗ, MicroPC, Fastwel, ROBO. Модуль APID адаптивного регулирования используется для управления объектами, оснащенными пропорциональным исполнительным механизмом, а модуль APDD - для управления объектами, оснащенными интегрирующим исполнительным механизмом постоянной или переменной скорости отработки. В настоящее время идет работа над компактными встраиваемыми микропроцессорными модулями с реализацией адаптивного ПИД-регулятора и возможностью их встраивания в микропроцессорные управляющие контроллера сторонних фирм. Внешний вид устройства представлен на рис. 3. Достоинства: Использование адаптивного ПИД-регулятора на практике позволяет потребителю: гарантировать наилучшее качество управления в любой момент времени для широкого класса нестационарных автоматизируемых объектов; применять алгоритм как для одноразовой или эпизодической настройки, так и обеспечить непрерывный процесс подстройки параметров регулятора под изменяющиеся динамические свойства объекта управления; работать со значительно меньшей амплитудой пробного сигнала на входе объекта. В частности, как показали эксперименты в РВ его можно уменьшить до 2…4 % при сохранении системой адаптивных свойств; достичь высокой помехоустойчивости алгоритма за счет применения фильтра Фурье для оценки характеристик объекта; обеспечить возможность автоматического контроля процесса самонастройки с целью исключения неустойчивых режимов работы. Кроме технических преимуществ, использование адаптивных алгоритмов регулирования позволяет получить существенный экономический эффект за счет: сокращения сроков и стоимости пусконаладочных работ; повышения качества выпускаемой продукции посредством высокоточного регулирования основных технологических параметров процесса; возможности работать в “минусовых” допусках, что позволяет получить экономический эффект 2…5 %; сокращения численности обслуживающего персонала. Владелец разработки: Спицын Александр Владимирович, к.т.н., докторант, 35-36-37, [email protected];