919 kb
реклама

222
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Раздел 9
НЕЛИНЕЙНЫЕ ЗАВИСИМОСТИ
В ЛИНЕЙНОМ ПРОСТРАНСТВЕ
§9.1. Билинейные функционалы
Определение
9.1.1.
Пусть в линейном пространстве каждой упорядоченной паре элементов x
и y поставлено в соответствие число B ( x , y ) так, что
1. B( x1 x2 , y) B( x1, y) B( x2 , y) ; x1, x2 , y ; ,
2. B( x, y1 y2 ) B( x, y1 ) B( x, y2 ) ; x, y1, y2 ; ,
тогда говорят, что в задан билинейный функционал (или билинейная
форма).
Пример
9.1.1.
1. Произведение двух линейных функционалов F (x ) и G ( y ) , определенных в , B( x, y ) F ( x )G ( y ) есть билинейный функционал.
2. Двойной интеграл
B( x, y ) K ( , ) x ( ) y ( )dd x ( )
( K ( , ) y( )d )d ,
где функция двух переменных K(,) непрерывна на множестве
:
, есть билинейный функционал в линейном пространстве
непрерывных на [ , ] функций.
3. Билинейным функционалом является скалярное произведение векторов
на плоскости или в пространстве.
223
Раздел 9
Нелинейные зависимости в линейном пространстве
Билинейные функционалы в
n .
Пусть в n заданы базис {g1, g 2 ,..., g n } и билинейный функционал B ( x , y ) . Найдем,
как выражаются его значения через координаты аргументов.
n
Предположим, что в рассматриваемом базисе x i g i и y
i 1
n
j g j , тогда, соj 1
гласно определению 9.1.1., справедливы равенства
n
n
n
n
n
i 1
j 1
i 1
j 1
n
n
n
B( x, y ) B( i g i , j g j ) i B( g i , j g j ) i j B( g i , g j ) ij i j .
Определение
9.1.2.
i 1 j 1
i 1 j 1
Числа ij B( g i , g j ) называются компонентами билинейного функционала
B ( x , y ) в базисе {g1, g 2 ,..., g n } , а матрица B
g
ij
- матрицей билиней-
ного функционала.
Если в n задан базис {g1, g 2 ,..., g n } , то билинейный функционал может быть представлен в виде
n
n
n
n
( x, y ) ki ki k 1 kii1
k 1i 1
n
k 1i 1
n
1Tk kii1 1 2
k 1
где столбцы x
i 1
g
и y
... n
11 12 ... 1n 1
21 22 ... 2 n 2
...
...
... ...
...
... nn n
n1 n 2
g
x
T
g
B
g
y
g
,
- координатные представления элементов x и y в данном базисе.
Матрица билинейного функционала зависит от выбора базиса. Правило изменения
матрицы билинейного функционала при замене базиса дает
Теорема
9.1.1.
Пусть
S
- матрица перехода от базиса {g1, g 2 ,..., g n } к базису
{g1 , g 2 ,..., g n } , тогда B
g
S
T
B
g
S .
224
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Доказательство:
По определению матрицы перехода от одного базиса к другому в n (см. §7.3.), имеют
n
место соотношения g k ik g i , k [1, n] , но тогда
i 1
n
n
n
n
kl B( g k , g l ) B( ik g i , jl g j ) ik jl B( g i , g j )
i 1
n
n
j 1
n
n
i 1
j 1
i 1 j 1
T
ik jl ij ki
ij jl ,
i 1 j 1
для всех k , l [1, n] .
Теорема доказана.
Следствие
9.1.1.
det B
g
det B
g
(det S ) 2 .
Доказательство:
Следует из теоремы 9.1.1., а также свойств детерминанта (теоремы 6.2.1. и 6.2.4.).
Отметим, что в силу невырожденности матрицы перехода знак определителя матрицы
билинейного функционала не зависит от выбора базиса.
Следствие
9.1.2.
Ранг матрицы билинейного функционала не зависит от выбора базиса.
Доказательство:
Следует из теоремы 8.4.3. и невырожденности матрицы перехода
S .
Определение
9.1.3.
Билинейный функционал B ( x , y ) называется симметричным, если для любой упорядоченной пары элементов x и y линейного пространства имеет
место равенство B( x, y ) B ( y, x ) .
Теорема
9.1.2.
Для симметричности билинейного функционала в n необходимо и достаточно, чтобы его матрица была симметрической.
225
Раздел 9
Нелинейные зависимости в линейном пространстве
Доказательство:
Необходимость следует из соотношений
ij B( gi , g j ) B( g j , gi ) ji ; i , j [1, n] .
Докажем достаточность. Действительно, если ij ji ; i , j [1, n] , то
n
n
n
n
n
n
B( y, x ) ji j i ji i j ij i j B( x, y ) .
j 1i 1
j 1i 1
i 1 j 1
Теорема доказана.
§9.2. Квадратичные функционалы
Определение
9.2.1.
Пусть в линейном пространстве каждому элементу x поставлено в соответствие число (x)=B(x,x), где B(x,y) некоторый билинейный функционал
в , тогда говорят, что в задан квадратичный функционал (или квадратичная форма).
В общем случае в вещественном линейном пространстве по заданному квадратичному
функционалу нельзя восстановить порождающий его билинейный функционал, однако это
можно сделать для случая симметричного билинейного функционала.
Действительно, пусть квадратичный функционал (x) порожден симметричным билинейным функционалом B(x,y) , тогда для любых x и y имеет место равенство
( x y ) B( x y , x y ) B( x , x ) B( x , y ) B( y , x ) B( y , y ) ( x ) 2 B( x , y ) ( y ) .
1
Откуда B( x , y ) ( x y ) ( x ) ( y ) ) .
2
Определение
9.2.2.
В
симметрическая
матрица
билинейного
функционала
n
1
( x y ) ( x ) ( y )) называется матрицей квадратичного функцио2
нала (x) .
226
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Если в n задан базис {g1, g 2 ,..., g n } , тогда квадратичный функционал может быть
представлен в виде
11 12 ... 1n 1
n
n
Ф ( x ) ki k i 1 2
k 1i 1
... n
21 22 ... 2n 2
...
...
n1 n2
... ... ...
... nn n
x
T
g
Ф
g
x
g
,
n
где x
g
- координатный столбец элемента x i g i в данном базисе. Замена базиса, естеi 1
ственно, приводит к изменению матрицы квадратичного функционала по формуле
g
S
T
g
S , определяемой теоремой 9.1.1.
Отметим, что иногда целесообразно строить квадратичный функционал Ф (x ) по порождающему билинейному функционалу, просимметрировав предварительно последний.
Действительно, для любого B ( x , y ) можно указать симметричный билинейный функционал
1
вида ( B( x , y ) B( y , x )) , который будет порождать тот же самый квадратичный функцио2
ij ji
, i , j [1, n] , где ij i , j [1, n] - элеменнал Ф (x ) , что и B ( x , y ) . В этом случае ij
2
ты матрицы квадратичного функционала Ф (x ) .
Пример
9.2.1.
Пусть в 3 задан билинейный функционал
B1( x, y ) 11 3 22 21 312 2 31 23 32
1 2 3
1
имеющий матрицу 1
2
1
1
2
3
3
1
0
1
0
1
2 ,
3
3
3
1
0
1 и, в силу теоремы 9.1.2., не являющийся
0
симметрическим. Порождаемый им в 3 квадратичный функционал будет
иметь вид
Ф1 ( x ) 12 3 22 41 2 21 3 2 2 3 .
227
Раздел 9
Нелинейные зависимости в линейном пространстве
В то же время симметричный билинейный функционал
B2 ( x, y ) 11 3 22 212 2 21 13 31 23 32
1 2 3
1
имеющий матрицу 2
1
функционал вида
2
3
1
1
2
1
2
3
1
1
1
0
1
2 ,
3
1
1 , будет порождать в 3 квадратичный
0
Ф2 ( x ) 12 3 22 41 2 21 3 2 2 3 ,
1
который совпадает с Ф1 ( x ) и имеет матрицу 2
1
2
3
1
1
1 .
0
В ряде важных прикладных задач оказывается необходимым отыскание базисов, в которых квадратичный функционал имеет наиболее простой и удобный для исследования вид.
Определение
9.2.3.
Квадратичный функционал Ф (x ) имеет диагональный вид в некотором базисе в n , если он в этом базисе представим как
n
Ф ( x ) i i2 , где i , i [1, n] -некоторые числа.
i 1
Если, кроме того, числа i , i [1, n] принимают лишь значения 0 или 1,
то говорят, что квадратичный функционал в данном базисе имеет канонический вид.
Теорема
9.2.1.
(Метод
Лагранжа)
Для каждого квадратичного функционала в n существует базис, в котором функционал имеет канонический вид.
Доказательство:
Воспользуемся методом математической индукции.
228
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
1.
При n 1 в любом базисе Ф (x ) = 1112 . Если 11 0 , то мы уже имеем канонический вид, если же 11 0 , то, выполняя замену переменных 1
11 1 ,
приходим к каноническому виду.
2.
Предположим, что утверждение теоремы верно для квадратичных функционалов, зависящих от n 1 переменной, и рассмотрим случай n переменных.
Будем считать, что 11 0 . Этого можно добиться изменением нумерации переменных в случае, когда хотя бы одно из чисел ii , i [2, n] не равно нулю.
Если же все ii , i [1, n] равны нулю одновременно, то, без ограничения общности, можно считать, что 12 0 . Тогда, выполняя невырожденную замену
переменных 1 1 2 , 2 1 2 , 3 3 ,..., n n , получаем запись квадратичного функционала с ненулевым диагональным элементом
Ф (x ) = 21212 2 21 22 F (1, 2 , 3 ,..., n ) ,
где F (1, 2 , 3 ,..., n ) не содержит квадратов от 1 и 2 .
3. В записи квадратичного функционала сгруппируем слагаемые, содержащие переменную 1 ,
n
n n
1i
1 i ) ik i k
i 2 11
i 2k 2
n
n
Ф (x ) = ik i k 11(12 2
i 1 k 1
и выделим полный квадрат, воспользовавшись соотношениями
n
n
k 1 i 1
k
n
n
n
n
( k )( i ) ( k ) ( 1 k ) 2
2
i
k 1
i 1
k 1
k 2
n
n
n
k 2
k 2
k 2
n
n
12 2 1 k ( k ) 2 12 2 1 k k i .
k 2 i 2
Получим
n n
n n
1i
1 i 1k 2 1i i k ) ( ik 1k 1i ) i k
11
i 2 11
i 2 k 2 11
i 2k 2
n
Ф (x ) = 11(12 2
1i 2 n n
i ) ( ik 1k 1i ) i k .
11
i 2 11
i 2k 2
n
и окончательно Ф (x ) = 11(1
В последней формуле первое слагаемое есть полный квадрат, а второе - квадратичный функционал, не зависящий от 1 и приводящийся, согласно предположению индукции, к каноническому виду некоторой невырожденной заменой
переменных
229
Раздел 9
Нелинейные зависимости в линейном пространстве
n
k ki i , k [2, n] .
i 2
4. Выполним замену переменных квадратичного функционала Ф (x ) по формулам
n
1i
(
i )
1
11
1
i 2 11
,
n
; k [2, n]
k ki i
i 2
которая приведет к представлению его в каноническом виде. Поскольку, в силу
11 0 , матрица выполненной замены переменных
11
T
0
...
0
11
22
...
n2
12
...
11
11
...
...
...
...
2n
1n
11
nn
n
имеет определитель не равный нулю, то замена k ki i , k [2, n] - невыi 2
1
рожденная. Но тогда матрица T имеет обратную: S T
(см. следствие
7.5.3.), которая, в свою очередь, является матрицей перехода к искомому базису.
Теорема доказана.
Замечание:
базис,
в котором квадратичный функционал имеет диагональный или канонический вид, не единственный, равно как не является единственным сам канонический или диагональный вид квадратичного функционала в n .
Метод Лагранжа не всегда оказывается наиболее простой (с точки зрения затрат вычислительных усилий) процедурой. Иногда приведение матрицы квадратичного функционала к диагональному (или каноническому) виду можно выполнить более эффективно, путем
использования некоторого набора ее элементарных преобразований.
230
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Действительно, при переходе от исходного базиса {g1, g 2 ,..., g n } к новому
{g1 , g 2 ,..., g n } с матрицей перехода
правилу Ф
g
S
T
Ф
g
S
матрица квадратичного функционала меняется по
S . Будем теперь рассматривать матрицу
которого элементарного преобразования матрицы Ф
ва, что умножение ее справа на Ф
g
тогда, в силу теоремы 6.8.2., матрица
g
S
как матрицу не-
(см. §6.8.). Пусть матрица S
тако-
приводит последнюю к нижнему треугольному виду,
Ф
g
оказывается диагональной. С другой стороны,
матрица
S представима как произведение матриц элементарных преобразований, последовательно примененных к столбцам единичной матрицы. Поэтому, выполнив диагонализацию Ф g некоторым набором элементарных преобразований, применяемых на каждом шаге процедуры как к ее строкам, так и к ее столбцам, и, применив тот же самый набор элементарных преобразований к столбцам единичной матрицы, мы получим как диагональный вид
матрицы квадратичного функционала Ф g , так и x g S x g - формулы перехода от
исходного базиса {g1, g 2 ,..., g n } к базису {g1 , g 2 ,..., g n } , в котором матрица квадратичного
функционала оказывается диагональной. Следующий пример иллюстрирует применение
данного алгоритма.
Задача
9.2.1.
Привести в 3 к диагональному виду
Ф( x) 212 22 4 32 81 2 21 3 8 2 3 .
Решение:
2
В исходном базисе функционал Ф(x) имеет матрицу 4
1
квадратичный
4
1
4
функционал
1
4 .
4
1º. На первом шаге процедуры выполним следующие элементарные операции:
- заменим вторую строку исходной матрицы разностью второй и
третьей ее строк;
- в полученной матрице заменим второй столбец разностью второго и третьего столбца
2 5
1
в результате чего получаем матрицу вида 5
3
0
1
Кроме того, в единичной матрице
1
0
0
разностью второго и третьего и получим
0
1
0
0
0
1
1
0
0
0 .
4
заменим второй столбец
0
1
1
0
0 .
1
231
Раздел 9
Нелинейные зависимости в линейном пространстве
2º. На втором шаге заменяем вначале первую строку утроенной первой,
сложенную со второй, взятой с коэффициентом 5. Соответственно такое
же преобразование выполняется со столбцами. Получаем следующие две
93 0
3
3
0 0
матрицы
5
1 0 .
0 3
0 и
3
0
4
5
1
1
3º. На третьем шаге заменяем третью строку первой, сложенную с третьей,
взятой с коэффициентом 31. Выполнив такие же преобразования со
93 0
0
столбцами. Соответственно, получаем матрицы
0 3
0 и
0
3
5
5
0
1
1
0
3751
3
5 .
26
3
0
3
Таким образом, при переходе к базису
5 ; 1 ; 5 , выполнив за5
1
26
3 3
1 31
мену координат по формулам перехода 2 51 2 5 3 , мы полу 5 26
1
2
3
3
чим следующий диагональный вид исходного квадратичного функционала Ф( x) 931 2 3 22 3751 3 2
§9.3. Исследование знака квадратичного функционала
Несмотря на неединственность диагонального или канонического представления,
квадратичные функционалы обладают рядом важных свойств, инвариантных относительно
(то есть не зависящих от) выбора базиса в n . Одной из таких характеристик является ранг
квадратичного функционала.
Определение
9.3.1.
Максимальное число, не равных нулю коэффициентов канонического вида
квадратичного функционала Ф (x ) , называется его рангом и обозначается
rg .
232
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Ранг квадратичного функционала в n не зависит от выбора базиса.
Теорема
9.3.1.
Доказательство:
По следствию 9.1.2. ранг матрицы билинейного функционала не зависит от выбора
базиса. Поэтому не будет зависеть от выбора базиса и ранг матрицы порождаемой им
квадратичного функционала.
С другой стороны, в силу теорем 8.4.3. и 9.1.1., ранг матрицы квадратичного функционала равен числу ненулевых коэффициентов в его каноническом виде.
Теорема доказана.
При исследовании знака значений квадратичного функционала оказывается полезным
использование следующих его характеристик:
Определение
9.3.2.
1. Число положительных коэффициентов диагонального (канонического)
вида квадратичного функционала Ф (x ) в n , называется его положительным индексом инерции и обозначается rg Ф .
2. Число отрицательных коэффициентов диагонального (канонического)
вида квадратичного функционала Ф (x ) в n , называется его отрицательным индексом инерции и обозначается rg Ф .
3. Разность между положительным и отрицательным индексами инерции
называется сигнатурой квадратичного функционала Ф (x ) в n и обозначается sgn Ф rg Ф rg Ф .
Теорема
9.3.2.
(инерции
квадратичных
функционалов)
Значения положительного и отрицательного индексов инерции, а также
сигнатуры квадратичного функционала Ф (x ) в n не зависят от выбора базиса, в котором этот функционал имеет диагональный (канонический) вид.
Доказательство:
1. Пусть квадратичный функционал Ф (x ) имеет в некотором базисе {g1, g 2 ,..., g n }
n
n
представление Ф (x ) ij i j и пусть существуют два различных базиса
i 1 j 1
{g1 , g 2 ,..., g n } и {g1, g 2 ,..., g n } , в которых (x) имеет следующий вид
k
Ф (x ) i i2
i 1
m
ii2 ;
i k 1
m n ; i 0 , i [1, m]
233
Раздел 9
Нелинейные зависимости в линейном пространстве
и, соответственно,
p
Ф (x ) i i2
i 1
q
i i2 ;
q n ; i 0 , i [1, q] .
i p 1
В силу сделанных предположений, должны существовать невырожденные матрицы замены переменных ij
и ij
при переходах от базиса {g1, g 2 ,..., g n } к
базисам {g1 , g 2 ,..., g n } и {g1, g 2 ,..., g n } такие, что
n
n
j 1
j 1
s sj j ; s [1, n] и s sj j ; s [1, n] .
(9.3.1.)
2. Приравняем значения функционала Ф (x ) в базисах {g1 , g 2 ,..., g n } и {g1, g 2 ,..., g n }
n
n
n
k 1
i 1
j 1
для некоторого элемента x k g k i g i j g j
k
i 1
i i2
m
i i2
i k 1
p
i 1
i i2
q
i i2
i p 1
и преобразуем полученное равенство к виду
k
ii2
i 1
q
p
i i2 i i2
i p 1
i 1
m
ii2
(9.3.2.)
i k 1
3. Исследуем полученное соотношение.
Допустим, что k p и предположим, что элемент x имеет в рассматриваемых базисах компоненты i 0 , i [1, k ] ; i 0 , i [ p 1, n] . Этих условий меньше, чем n, поскольку k p . Если их подставить в равенства (9.3.1.), то мы получим однородную систему линейных уравнений относительно неизвестных
{1, 2 ,..., n } .
Поскольку число таких уравнений меньше числа неизвестных, то можно утверждать, что она в силу теоремы 6.7.1. имеет нетривиальные решения, а следовательно, элемент x может быть ненулевым.
С другой стороны, из равенства (9.3.2.), положительности чисел i ; i [1, m] и
i ; i [1, q ] , а также условий i 0 , i [1, k ] ; i 0 , i [ p 1, n] следует,
что также i 0 ; i [1, p] .
234
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Что, в свою очередь, означает: следующая из (9.3.1.) однородная система
n
s sj j ; s [1, n] с невырожденной основной матрицей, может иметь тольj 1
ко тривиальное решение, а элемент x обязан быть нулевым.
Полученное противоречие показывает ошибочность предположения о том, что
k p.
4. Аналогичными рассуждениями показываем, что невозможно и соотношение
k p . Поэтому приходим к заключению, что k p .
5. По теореме 9.3.1. m q и потому k m p q .
Теорема доказана.
Для исследования знака значений квадратичного функционала введем в рассмотрение
понятие его знаковой определенности.
Определение
9.3.3.
1. Квадратичный функционал Ф (x ) называется положительно определенным на подпространстве , если Ф ( x ) 0 для любого ненулевого x .
2. Квадратичный функционал Ф (x ) называется отрицательно определенным на подпространстве , если Ф ( x ) 0 для любого ненулевого x .
3. Если же + (или -) совпадает с , то говорят, что квадратичный функционал Ф (x ) является положительно (отрицательно) определенным.
4. Если же Ф( x) 0 (Ф( x) 0) для всех x , то говорят, что квадратичный функционал является положительно (отрицательно) полуопределенным.
Теорема
9.3.3.
Максимальная размерность подпространства в n , на котором квадратичный функционал положительно (отрицательно) определен равняется положительному (отрицательному) индексу инерции этого
функционала.
Доказательство:
Следует из теоремы 9.3.2. и очевидного равенства числа положительных (отрицательных) элементов матрицы квадратичного функционала в диагональном представлении размерности подпространства + (-).
235
Раздел 9
Нелинейные зависимости в линейном пространстве
В ряде прикладных задач оказывается необходимым проведение исследования знаковой определенности квадратичного функционала без приведения его к диагональному виду.
Удобное необходимое и достаточное условие положительной определенности квадратичного
функционала дает
Теорема
9.3.4.
(Критерий
Сильвестра)
Для положительной определенности квадратичного функционала в n
необходимо и достаточно, чтобы все главные миноры его матрицы,
имеющие вид
det
11 12 ... 1k
21 22 ... 2k
...
...
k1 k 2
... ...
... kk
; k [1, n]
были положительными.
Доказательство достаточности:
1. Воспользуемся методом математической индукции.
Для k 1 достаточность очевидна. Допустим, что из положительности главных
миноров матрицы квадратичного функционала порядка до k n 1 включительно следует возможность приведения квадратичного функционала от n 1 переn 1
менных к виду Ф ( x ) i2 .
i 1
2. Покажем, что в этом случае достаточность будет иметь место и для квадратичных
функционалов, зависящих от n переменных.
В выражении для квадратичного функционала, зависящего от n переменных, выделим слагаемые, содержащие n
n 1n 1
n 1
k 1i 1
k 1
Ф ( x ) ki k i 2 kn k n nn n2 .
Двойная сумма в правой части этого равенства есть квадратичный функционал
Ф (x ) , зависящий от n 1 переменной, причем его главные миноры совпадают с
главными минорами Ф (x ) до порядка n 1 включительно, которые, по предположению индукции, положительны. Отсюда следует, что квадратичный функционал Ф (x ) положительно определенный и для него существует невырожденная
замена переменных
236
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
n 1
k kii ; k [1, n 1] ,
i 1
n 1
приводящая его к каноническому виду Ф ( x ) i2 .
i 1
Выпишем представление квадратичного функционала Ф (x ) в новых переменных
n 1
n 1
i 1
i 1
i n nn n2
Ф ( x ) i2 2 in
и выделим в нем полные квадраты
n 1
n 1
n 1
i 1
n 1
i 1
i 1
i n in
2 n2 ) ( nn in
2 ) n2 i2 nn
n2 ,
Ф ( x ) (i2 2 in
nn in
2 ; i i in
n ; i [1, n 1] .
где nn
i 1
В матричном виде эту замену переменных можно записать как
1
2
1
0
0
1
0
0
1, n
2, n
1
2
n 1
0 0 0 1 n 1, n n 1
n
0
0
0
0
1
n
и поскольку определитель ее матрицы отличен от нуля, то эта замена невырожденная.
3. Наконец, в силу следствия 9.1.1. определитель матрицы квадратичного функционала сохраняет знак при замене базиса. Знак определителя матрицы квадратичного функционала в исходном базисе положительный, поскольку этот определитель
имеет вид
11 12 ... 1n
21 22 ... 2 n
det
... ... ... ...
n1 n 2 ... nn
и является главным минором порядка n. Но тогда из выражения для Ф (x ) в конечном
базисе мы получаем, что определитель матрицы квадратичного функционала Ф (x )
. Поэтому nn
0 и можно сделать замену переменных n n nn
равен nn
, приn
водящую к каноническому виду функционал Ф ( x ) i2 .
i 1
237
Раздел 9
Нелинейные зависимости в линейном пространстве
Следовательно, квадратичный функционал Ф (x ) положительно определен для
числа переменных n, а, значит в силу математической индукции, для любого числа переменных.
Достаточность доказана.
Доказательство необходимости критерия Сильвестра положительной определенности
квадратичного функционала приводится в разделе “Евклидово пространство”, §10.3.
Исходя из критерия Сильвестра для положительной определенности квадратичного
функционала, можно получить аналогичный критерий отрицательной определенности квадратичного функционала:
Для отрицательной определенности квадратичного функционала в n
необходимо и достаточно, чтобы главные миноры четного порядка
матрицы функционала были положительны, а нечетного порядка - отрицательны.
Следствие
9.3.1.
Доказательство:
Пусть квадратичный функционал Ф (x ) отрицательно определенный, тогда функционал Ф (x ) будет, очевидно, положительно определенным. Применяя к нему критерий Сильвестра положительной определенности, получим для главного минора k-го
порядка, использовав линейное свойство определителя, условие
11 12
21 22
det
...
...
k1 k 2
... 1k
... 2k
(1) k det
...
...
... kk
11 12 ... 1k
21 22 ... 2k
...
...
k1 k 2
... ...
... kk
0 ; k [1, n] .
Откуда и следует доказываемое утверждение.
Следствие доказано.
§9.4. Инварианты линий второго порядка на плоскости
Независимость значений ранга и сигнатуры квадратичного функционала от выбора
базиса позволяет выполнить классификацию линий второго порядка на плоскости способом,
отличным от приведенного в теореме 4.4.1.
238
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Рассмотрим линию второго порядка на плоскости Oxy в базисе {g1, g 2 } и с началом
координат в точке O. Эта линия в общем случае задается согласно определению 4.4.1. уравнением вида Ax 2 2Bxy Cy 2 2 Dx 2Ey F 0 , где числа A , B , C , D , F и E произвольны с одним лишь ограничением, что A, B и C, не равны нулю одновременно
( A B C 0 ).
Нетрудно проверить, что при замене начала координат коэффициенты A , B и C не меняются, а при смене базиса преобразуются как коэффициенты квадратичного функционала
(см. теорему 9.1.1.). Поэтому можно считать, что многочлен Ax 2 2 Bxy Cy 2 задает квадA B
ратичный функционал ( x , y ) Ax 2 2 Bxy Cy 2 с матрицей
в исходном базисе
B C
{g 1 , g 2 } .
На основании теорем 9.2.2. и 9.3.1. заключаем, что rg - ранг и sgn - сигнатура
квадратичного функционала ( x , y ) не зависят от выбора системы координат и, следовательно, rg и sgn являются инвариантами линии второго порядка на плоскости. Использование модуля сигнатуры необходимо, поскольку одновременное изменение знаков
всех коэффициентов уравнения линии второго порядка изменит, естественно, само уравнение, хотя линия при этом останется той же.
Поскольку в запись уравнения линии второго порядка на плоскости входят также и
коэффициенты D, F и E, то следует выяснить, не существуют ли дополнительные инварианты, образованные из всей совокупности коэффициентов A, B, C, D, F и E. Для этого рассмотрим вспомогательный квадратичный функционал в 3 вида
( x , y , z) Ax 2 2 Bxy Cy 2 2 Dxz 2 Eyz Fz 2
A
B D
с матрицей B C
D E
E в базисе {g1 , g 2 , g 3 } .
F
Заметим, что совокупность всех точек в 3 , для которых ( x , y ,1) 0 , есть рассматриваемая нами линия второго порядка, расположенная в пространстве на плоскости z 1 .
Пусть в 3 выполняется замена базиса, при которой плоскость z 1 переходит сама в себя.
Найдем для этой замены базиса правило изменения коэффициентов квадратичного функционала ( x , y , z ) .
Лемма
9.4.1.
Матрица S перехода от базиса {g1, g 2 , g 3} к базису {g1 , g 2 , g 3 } , при
которой плоскость z 1 переходит сама в себя имеет вид
11 12 13
S 21 22 23 .
0
0
1
239
Раздел 9
Нелинейные зависимости в линейном пространстве
Доказательство:
Замена координат в плоскости Oxy выполняется по формулам
x 11 x 12 y 13
,
y 21 x 22 y 23
x
11 12
но поскольку при этом z 1 и z 1 , то y 21 22
1
0
0
13
23
x
y .
1
1
Невырожденность матрицы S следует из очевидного условия det
11 12
0.
21 22
Лемма доказана.
Поскольку ранг и сигнатура квадратичного функционала не меняются при любых заменах базиса, то это будет верным и для замен, переводящих плоскость z 1 саму в себя.
Поэтому rg и sgn сохраняются при таких заменах, а числа rg и sgn являются
инвариантами уравнения линии второго порядка.
Таким образом доказана
Теорема
9.4.1.
При любых заменах декартовой системы координат на плоскости Oxy
числа rg , rg ,
второго порядка.
sgn
и
sgn
являются инвариантами линии
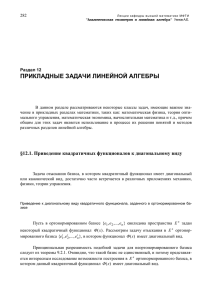
Подсчитаем значения чисел rg , rg , sgn и sgn для девяти видов линий
второго порядка на плоскости, приведенных в формулировке теоремы 4.4.1. результаты поместим в таблицу 9.4.1.
Вид линии
1
Эллипс
2
Мнимый эллипс
3
Точка
Каноническое уравнение
x2 y2
2 1
a2
b
2
y2
x
2 1
a2
b
x2 y2
2 0
a2
b
rg
sgn
rg
sgn
3
1
2
2
3
3
2
2
2
2
2
2
240
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
x2 y2
2 1
a2
b
4
Гипербола
5
Пересекающиеся
прямые
6
Парабола
7
Параллельные
прямые
y2 a2
8
Пара мнимых
прямых
y 2 a 2
9
Совпадающие
прямые
y2 0
x2
a2
y2
b2
0
y 2 2 px
3
1
2
0
2
0
2
0
3
1
1
1
2
0
1
1
2
2
1
1
1
1
1
1
Таблица 9.4.1.
Из таблицы 9.4.1. следует, что каждый вид линии второго порядка на плоскости имеет
свой, уникальный набор значений инвариантов, который может быть принят за признак принадлежности некоторой линии второго порядка к конкретному виду.
В заключение отметим, что
1. Подсчет значений рангов и модулей сигнатур выполняется путем приведения
квадратичного функционала к диагональному виду. Однако для параболы приведение функционала ( x , y , z ) к диагональному виду матрицей перехода, переводящей плоскость z 1 саму в себя, вообще говоря, невозможно, поскольку его
0
0 p
матрица имеет вид
0
p
1
0
0 .
0
В этом случае для подсчета ранга и сигнатуры можно использовать матрицу пере1 0 1
хода S
0
1
1
0
0 , которая, хотя и не обеспечивает выполнение условия пе1
рехода плоскости z 1 самой в себя, но, как всякая линейная замена координат
сохраняет ранг и сигнатуру.
241
Раздел 9
Нелинейные зависимости в линейном пространстве
Действительно,
g
T
S
1
S 0
1
g
0
1
0
1
0
0
0
1 p
0 p
1
1
0
0
0
0 1
0
1
0
1
2p
0 0
1
0
0
0
1
0 .
0 2p
2. Для линий второго порядка на плоскости существуют и другие ортогональные
I1 A C
инварианты, например, инвариантами являются числа
и
A B
I 2 det
. Докажите справедливость этого утверждения самостоятельно.
B C
3. Схема классификации, аналогичная рассмотренной, может быть построена и для
поверхностей второго порядка в пространстве.
§9.5. Экстремальные свойства квадратичных функционалов
Из теоремы 9.2.1. следует существование в n базиса, в котором квадратичный функционал Ф (x ) имеет диагональный вид. Допустим, что такой базис {g1 , g 2 ,..., g n } построен
n
так, что Ф (x ) i i2 и 1 2 ... n 1 n . Тогда имеет место
i 1
Теорема 9.5.1.
Для квадратичного функционала Ф (x ) в n справедливы соотношения 1 min Ф ( x ) и n max Ф ( x ) , при условии, что компоненты x
xn
xn
n
удовлетворяют условию
i2 1 .
i 1
Доказательство:
n
Если в рассматриваемом базисе
Ф ( x ) i i 2 , то, в силу соотношений
i 1
1 2 ... n 1 n , будут иметь место неравенства
n
n
i 1
i 1
1 i2 i i2 .
n
n
i 1
i 1
ii2 n i2
и
242
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
n
Но поскольку
i2 1 , то будут справедливы и неравенства
i 1
n
1 i i2 . То есть при x 0,0,...,1
T
n
ii2 n
и
i 1
достигается максимум, а при x 1,0,...,0
T
i 1
- минимум значений функционала.
Теорема доказана.
§9.6. Полилинейные функционалы
По аналогии с билинейными функционалами, зависящими от пары элементов линейного пространства, можно определить нелинейные функционалы, обладающие аналогичными свойствами, но зависящие от большего числа аргументов.
Определение
9.6.1.
Пусть в линейном пространстве каждой упорядоченной совокупности k
элементов {x1, x2 ,..., xk } поставлено в соответствие число Q( x1, x2 ,..., xk )
так, что для любого j=[1,k]
Q( x1,..., xj xj ,..., xk ) Q( x1,..., xj ,..., xk ) Q( x1,..., xj ,..., xk ) ;
x, x ; , ,
тогда говорят, что в задан полилинейный функционал, а именно, kлинейный функционал.
Пример
9.6.1.
1. Произведение k линейных функционалов F1 ( x ), F2 ( x ),, Fk ( x ) , определенных в , то есть Q( x1, x2 ,, xk ) F1 ( x1 ) F2 ( x2 )Fk ( xk ) , есть kлинейный функционал.
2. Смешанное произведение трех векторов в трехмерном геометрическом
пространстве является трилинейным функционалом.
3. Определитель n-го порядка есть полилинейный функционал от n элементов в n в случае, когда координатные представления этих элементов являются столбцами данного определителя.