СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО
реклама

УДК 62.5; 519.6
СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО
АППАРАТА В АТМОСФЕРЕ МАРСА
Дивеев Асхат Ибрагимович, д.т.н.,
Северцев Николай Алексеевич, д.т.н.,
Шмалько Елизавета Юрьевна, к.т.н.
Вычислительный центр им. А.А. Дородницына РАН
ул. Вавилова, 40, Москва, Россия, 119333
Рассмотрена задача спуска космического аппарата в атмосфере Марса. Требования
времени таковы, что следующее поколение космических кораблей, исследующих Марс,
должны с высокой точностью доставлять максимально нагруженные
научные
лаборатории на Марс. Для синтеза оптимального управления предложен метод сетевого
оператора. Управление обеспечивает минимум максимальной перегрузки в процессе
спуска и попадание в заданную терминальную точку при вариации начальных условий.
Ключевые слова: спуск космического аппарата, синтез системы управления,
сетевой оператор
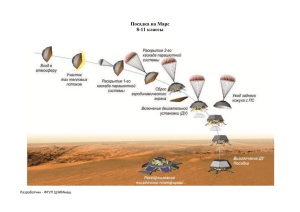
Исследование и осмысление основных тенденций спуска в атмосфере
Марса и последующей посадки космического аппарата (КА) на поверхность
планеты является основополагающим шагом к последующему повышению
качества полетов к "красной" планете и, быть может, высадки людей на
поверхность Марса.
Как показала практика, 66% предпринятых миссий на Марс оказались
провальными. И, несмотря на то, что вход КА в атмосферу, торможение и
посадка его на поверхность Марса длятся в общей сложности около 6 минут
(а весь полет составляет порядка двух лет), данный этап является самым
сложным с точки зрения безопасности и точности полета.
Очевидно, что на сегодняшний день не создано достаточно надежной
системы спуска и посадки КА на Марс, позволяющей безопасно в смысле
перегрузки и целостности аппарата и с требуемой точностью посадить
аппарат в запланированное место посадки. Актуальным так же остается
вопрос об увеличении массы спускаемого аппарата, что представляет собой
сложную задачу в условии крайне высокой разреженности атмосферы Марса.
[1]. Кроме того, параметры атмосферы Марса значительно меняются в
зависимости от времени года, времени суток, наличию пылевых бурь и др.
Значительная удаленность Марса в свою очередь затрудняет
управление с Земли процессом спуска космического аппарата. Все
вышеуказанные трудности, а также высокая стоимость приближенного
моделирования марсианской среды накладывают определенные ограничения
на исследования в области спуска на Марс и выработку оптимальных
управлений.
Одной из основных проблем, являющихся причиной неудачных
посадок заключается в отсутствии точных знаний о начальном состоянии
спускаемого космического аппарата. Траектория спуска и его основные
параметры, точность посадки и максимальная перегрузка, существенно
зависят от начального угла входа в атмосферу и начальной высоты.
Преодолеть указанные трудности в данной работе предлагается путем
ухода от построения оптимального управления как функции времени, так как
оно не учитывает поведения системы уже в процессе функционирования и
влияния этого поведения на дальнейшее состояние всей системы. В свою
очередь предлагается использовать синтез системы управления как функции
от состояния объекта. Именно такое поведенческое описание систем в
динамике является приоритетным на сегодняшний день, поскольку
максимально учитывает работу объекта в реальности.
Математическая модель спускаемого космического аппарата
представляет собой систему дифференциальных уравнений четвертого
порядка.
dx1
= x2 ,
dt
g 0 RM2 x1
dx2
x2
x4
= −X
− Y cos(u ) −
32 ,
dt
V
V
x12 + x32
dx3
= x4 ,
dt
2 x
g 0 RM
dx4
x4
x2
3
= −X
+Y
cos(u ) −
32 ,
dt
V
V
2
2
(x + x )
(
)
1
(1)
(2)
(3)
(4)
3
где x1 , x3 – координаты центра масс космического аппарата в ортогональной
системе координат, x2 , x4 – компоненты скорости космического аппарата, u
– управление, u − ≤ u ≤ u + , RM – экваториальный радиус Марса, g 0 –
ускорение свободного падения на поверхности Марса,
2S
C y ρV 2 S
C
ρ
V
x
V = x22 + x42 , X =
,Y=
,
2m
2m
m – масса космического аппарата, S – площадь поверхности сопротивления
комического аппарата, С x , С y – аэродинамические коэффициенты,
ρ = ρ 0 e − λH ,
ρ0 – плотность атмосферы на поверхности Марса, λ – коэффициент
разреженности атмосферы,
H = x12 + x32 − RM .
Заданы начальные x1 (0 ) = 0 условия: x1 (0 ) = 0 , x 2 (0) = V0 cos( ϑ(0)) ,
x3 (0) = H (0) + R M , x 4 (0) = V0 sin( ϑ(0)) ,
где ϑ (0) – угол наклона траектории при входе в атмосферу,
ϑ(0) = ϑ j , ϑ j = ϑ 0 + j∆ϑ , j ∈ {0,1,K , K ϑ } ,
(5)
H (0) – расстояние до поверхности планеты, с которого начинается вход в
атмосферу,
(6)
H (0) = H i , H i = H 0 + ( 2i − 1) ∆H , i ∈ {0,1,K , K H } .
Цель управления описывается следующими функционалами:
J = max G + βE t f → min ,
(7)
( )
0≤t ≤t f
где β - весовой коэффициент, G - перегрузка
G=
V&x2 + V&y2 + V&z2
,
g0
2 x
g 0 RM
x2
x4
1
&
Vx = − X
−Y
cos(u1 ) −
3
2 ,
V
V
2
2
(x + x )
1
3
2 x
g 0 RM
3
3
2,
2
2
x1 + x3
x
x
V&y = − X 4 + Y 2 cos(u1 ) −
V
V
(
( )
)
V& z = Y sin(u ) ,
E t f - терминальная ошибка
E (t f ) = L (t f ) − L f + H (t f ) − H f ,
x
L = RM arctg 1 ,
x3
H = x12 + x32 − RM .
Управление ищем в виде
u = ϕ(L, H ,V , G , q ),
(8)
где ϕ(x, q ) – искомое математическое выражение, q – вектор параметров, не
меняющихся в процессе управления.
Особенностью рассматриваемой задачи является наличие множества
начальных значений (5), (6). При различных начальных значениях (5), (6)
значения функционала (7), различны.
Система управления (9) должна для каждого начального значения из
множеств (5), (6) обеспечивать такое управление, которое бы давало
оптимальные значения функционалов, т.е. такие значения, которые могли бы
быть получены при решении задачи оптимального управления.
Для решения такой задачи синтеза используем два этапа. На первом
этапе решаем задачи оптимального управления для каждого начального
~
значения. Получаем массив оптимальных значений функционалов J (i, j ) , где
i, j определяет начальные значения (5). (6).
На втором этапе решаем задачу синтеза (8) с функционалом
~
Kϑ K H
J (i, j ) − J (i, j )
→ min ,
J= ∑ ∑
~
,
J
(
i
j
)
j =0 i =0
(9)
При решении задач оптимального управления используем метод
аппроксимации кривыми Безье [2]. При решении задачи синтеза используем
вычислительный метод сетевого оператора [3,4].
В таблице 1 приведены результаты решения задачи оптимального
управления при различных начальных значениях.
При моделировании использовались следующие числовые значения
параметров: g 0 = 3,71 ⋅ 10 −3 км / с 2 , RM = 3396 км , ρ 0 = 0,02 кг / м 3 , λ = 0,093 ,
S = 9,61625 м 2 , m = 930 кг , С x = 1.68, С y = 0.3024, V0 = 4.5 км / с , H f = 10
км , L f = 600 км , t + = 300 с, u − = − π , u + = 0 , β = 0.25 .
ϑ0
− 0, 28
− 0, 28
− 0, 28
− 0,3
− 0,3
− 0,3
− 0,32
− 0,32
− 0,32
H0
155
160
165
155
160
165
155
160
165
max G
18,7794
18,5722
18,3602
21,0018
20,8197
20,6339
23,1743
23,0138
22,8499
Таблица 1.
E (t f )
20,82
43,27
61,41
32,60
12,27
7,26
77,62
59,32
40,88
Литература
1.
2.
3.
4.
Braun R.D., Manning R.M. Mars Exploration Entry, Descent and Landing
Challenges//IEEE Aerospace Conference, Big Sky Montana, March 2006.
Paper №0076.
Дивеев А.И., Шмалько Е.Ю. Метод аппроксимации кривыми Безье для
решения задачи оптимального управления посадкой космического
аппарата// Труды ИСА РАН. Динамика неоднородных систем/ Под ред.
чл.- корр. РАН Ю.С. Попкова. М.: ИСА РАН, КомКнига, 2007. Том
31(1). С. 8-13.
Дивеев А.И., Шмалько Е.Ю. Многокритериальный структурнопараметрический синтез системы управления спуском космического
аппарата на основе метода сетевого оператора// Вестник Российского
университета дружбы народов. Серия инженерные исследования
(информационные технологии и управление). 2008, № 4. С. 86 - 93.
Дивеев А.И. Метод сетевого оператора. М.: Изд-во ВЦ РАН. 2010. 178 с.
SYNTHESIS OF CONTROL SYSTEM FOR SPACECRAFT DECENT IN
MARTIAN ATMOSPHERE
A.I. Diveev, N.A. Severtsev, E.Y. Shmalko
Spacecraft decent in Martian atmosphere is considered. The next generation of Mars
exploration landers must precisely deliver massive scientific payloads to sites of interest.
Network operator method is used for optimal control synthesis. It delivers minimum to maximal
G-force and landing in the defined area allowing some variations in initial conditions.
Key words: spacecraft landing, synthesis of control system, network operator