Оценка влияния расстояния видимости на режимы движения
реклама

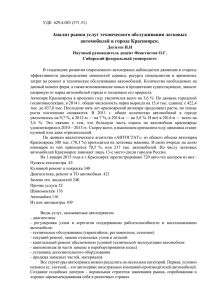
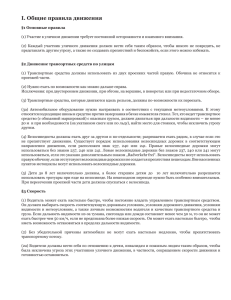
СТРОИТЕЛЬСТВО И СОДЕРЖАНИЕ ДОРОГ Оценка влияния расстояния видимости на режимы движения лесовозных автопоездов О.Н. БУРМИСТРОВА, д-р техн. наук (Ухтинский государственный технический университет) В статье приведены результаты исследования движения в реальных условиях единичных автомобилей и транспортных потоков на участках дорог с различными значениями расстояния видимости, интенсивности и безопасности движения транспортных средств. Ключевые слова: автопоезд, кривые в плане, интенсивность, динамические качества, скорости движения, интервалы времени, обеспечение видимости. Идеальным случаем движения на участках дорог с необеспеченными параметрами видимости в плане и профиле является транспортный поток, в котором каждый элемент его совокупности следует без обгонов с постоянной оптимальной скоростью. Подобный случай возможен для однотипных автомобилей с одинаковыми динамическими характеристиками. В реальных условиях практически невозможно встретить поток из однотипных автомобилей. В общем транспортном потоке могут быть автомобили с различными динамическими свойствами, что приводит к осложнению условий движения. Поэтому важно установить влияние условий видимости на изменение характеристик движения потока автомобилей и их безопасность. Рис. 1. Распределение интервалов времени t между автомобилями в транспортном потоке на участках дороги с ограниченной видимостью при различных значениях интенсивности I движения: а – кривые распределения интервалов времени; б – кумулятивные кривые; 1 – 425 авт/ч; 2 – 333 авт/ч; 3 – 357 авт/ч; 4 – 202 авт/ч; 5 – 158 авт/ч; 6 – 7 авт/ч 20 а участках дорог с обеспеченными параметрами видимости при малой интенсивности движения действия водителей определяются лишь восприятием дорожной обстановки. По мере увеличения скорости движения они начинают ощущать влияние других транспортных средств, продолжительность ожидания обгона увеличивается. Создаются «пачки» из двух, трёх и более автомобилей, следующих друг за другом с интервалом времени 3 с за медленно движущимся автомобилем в ожидании момента для обгона, в результате скорость движения снижается [1]. При свободных условиях движения разность значений скорости отдельных групп автотранспортных средств составляет 12–25 км/ч, уменьшаясь до 8 км/ч при интенсивности, равной 800 авт/ч в обоих направлениях. Одной из причин уменьшения скорости движения автомобилей при увеличении его интенсивности является снижение количества обгонов в связи с уменьшением числа интервалов, продолжительность которых достаточна для обгона. Режимы движения автомобилей в условиях ограниченной видимости (криволинейные в плане и продольном профиле) существенно отличаются от таковых при обеспеченном расстоянии видимости [1]. Интервал времени между автомобилями снижается до минимума (рис. 1, а и б), в результате создаются «пачки» из двух, трёх Н СТРОИТЕЛЬСТВО И СОДЕРЖАНИЕ ДОРОГ Рис. 2. Зависимость среднего количества автомобилей Nа в группах, движущихся по участку дороги с двумя полосами движения при необеспеченной видимости в профиле, от интенсивности I движения и более автомобилей (рис. 2). В этом случае автомашины двигаются в режимах, близких к предельным, что резко ухудшает условия дорожного движения. Результаты наблюдений за числом машин в группах на участках дорог с необеспеченной видимостью свидетельствуют о том, что среднее число групп зависит от количества медленно движущихся автомобилей в транспортном потоке и находится в прямой пропорциональной зависимости от интенсивности движения (рис. 3). При свободных условиях движения среднее квадратичное отклонение значений скорости движения отдельных групп транспортных средств на участках с ограниченной видимостью в профиле и плане соответственно составляет 14 и 10 км/ч, уменьшаясь до 9 и 7 км/ч при интенсивности движения 250 авт/ч в одном направлении (рис. 4, а и б). Результаты анализа значений средней скорости быстроходных автомашин и медленно едущих позволяют определить величину потерь времени, необходимую для техникоэкономических расчётов при обосновании мероприятий по повышению транспортноэксплуатационных характеристик дороги на участках с необеспеченными параметрами видимости [2]. Потери времени одного быстроходного транспортного средства можно оценить на основе следующих положений. Так, быстроходный автомобиль движется со средней скоростью v' приближаясь к тихоходной машине, водитель с замедлением j2 снижает скорость до vт. Продолжительность замедленного движения быстроходного автомобиля равна: Рис. 3. Зависимость среднего количества Nп «пачек» в транспортном потоке от интенсивности I движения Рис. 4. Зависимость среднеквадратического отклонения скоростей Δv отдельных групп автомобилей от интенсивности I движения: а – на участках с ограниченной видимостью в профиле; б – на участках с ограниченной видимостью в плане Время движения быстроходного автомобиля со скоростью тихоходного vт определяется продолжительностью преодоления подъёма длиной Lп: где – скорость движения тихоходного автомобиля на подъёме длиной Lп при уклоне i, м/с. Продолжительность проезда участка, на котором сказывается влияние попутного автомобиля, составляет: T в = T 1 + T 2. При свободном движении, когда быстроходный автомобиль не испытывает помех со стороны тихоходного, время преодоления этого участка равно: Tс = T3 + T4, где T3 – время проезда участка замедления, с; T4 – время проезда подъёма длиной Lп при уклоне i, с. 21 СТРОИТЕЛЬСТВО И СОДЕРЖАНИЕ ДОРОГ Время проезда участка замедления длиной L3 составляет: Время на преодоление подъёма составляет: где – скорость движения быстроходной машины в конце подъёма длиной Lп при уклоне i, м/с. Потери времени одного быстроходного автомобиля на участке влияния тихоходного составляют: ΔT = Tв – Tс. (1) Рассчитав значения Tв, Tс и подставив их в формулу (1), после преобразования получим выражение: Зная количество быстроходных автомобилей в группе m и количество «пачек» М, прошедших в течение 1 ч по одной полосе на участке влияния тихоходного автомобиля, можно определить общие потери времени за год: T = 2,028ΔTmM. Потери времени одного быстроходного автомобиля на участке влияния тихоходного в зависимости от длины подъёма при различных значениях угла уклона приведены на рис. 5. Рис. 5. Определение потерь времени ΔT автомобиля, следующего за медленно движущимся транспортным средством на подъёмах длиной Lп: 1 – i = 70%; 2 – i = 60%; 3 – i = 50%; 4 – i = 40% Рис. 6. Вероятность P появления интервала более 15 с при различной интенсивности I движения с необеспеченной видимостью в плане (а) и в профиле (б) 22 Вероятность появления интервала времени более 15 с при увеличении интенсивности движения для участков с необеспеченными параметрами видимости в плане изменяется по кривой (рис. 6, а), а для участков видимости продольного профиля дороги – по кривой (рис. 6, б). На рис. 6, построенном по средним значениям наблюдений за интервалами времени между автомобилями, видно, что при интенсивности движения менее 300 авт/ч имеются реальные возможности повышения производительности автотранспорта. Существующие методы организации и регулирования движения (разметка проезжей части в виде сплошной разделительной линии, запрещающие знаки и другие технические средства) не всегда себя оправдывают. Вывод Эффективность технических средств организации движения транспортных средств во многом зависит от того, насколько правильно учтены условия, при которых эти средства должны применяться. В одних и тех же условиях с изменением интенсивности движения резко меняется режим работы водителей и потока автомобилей, что приводит к изменению требований к соответствующим средствам регулирования. Отсюда возникает необходимость разработки специальных устройств организации дорожного движения на участках дорог с ограниченной видимостью, учитывающих особенность работы водителей в различных условиях. Список литературы 1. Определение параметров, характеризующих движение лесовозных автопоездов по участку магистрали общего пользования / В.Н. Макеев, С.И. Сушков, А.И. Фурменко, М.С. Солопанов // Лесотехнический журнал. 2013. № 3 (11). С. 70–75. 2. Сушков С.И. Особенности определения показателей движения автопоездов при проектировании дорог // Строительные и дорожные машины. 2014. № 11. С. 52–55. Burmistrova O.N. Assessing the impact of distance visual regimes of timber trains In the article the questions of movement of individual vehicles and traffic flows in real conditions on the road sections with different distances appear to vehicular traffic, traffic safety in various road conditions. Keywords: truck, curves in terms of intensity, dynamic quality, speed, time intervals, ensuring visibility. CДM