018877 B1 018877 B1 (11) 018877
реклама
 018877")
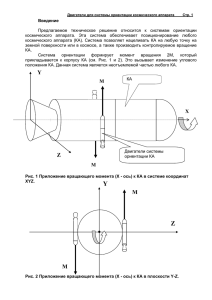
Евразийское патентное ведомство (19) (11) 018877 (13) B1 (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ЕВРАЗИЙСКОМУ ПАТЕНТУ (45) Дата публикации и выдачи патента (51) Int. Cl. B64G 1/28 (2006.01) 2013.11.29 (21) Номер заявки 201100732 (22) Дата подачи заявки 2011.05.11 (54) СПОСОБ ИЗМЕНЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ B1 (74) Представитель: (57) Изобретение относится к космической технике, а именно к управляющим устройствам космических аппаратов (КА), и может быть использовано при проектировании систем управления угловым движением и стабилизацией КА в пространстве. Способ изменения угловой ориентации и стабилизации космического аппарата заключается в осуществлении воздействия на проводящую жидкость, находящуюся в сферическом корпусе, магнитным полем. Жидкость размещают в сферическом слое, образованном между внешним сферическим корпусом и внутренним сферическим ядром. Затем создают электрическое поле, перпендикулярное магнитному, и осуществляют поворот космического аппарата за счёт вращения жидкости в сферическом слое под действием силы Ампера. Устройство для изменения угловой ориентации и стабилизации космического аппарата включает сферический корпус с проводящей жидкостью и магнитную систему. Внутри корпуса установлено сферическое ядро с образованием сферического слоя, заполненного проводящей жидкостью. Внутри указанного слоя попарно и диаметрально противоположно закреплены электроды, которые формируют электрическое поле, перпендикулярное магнитному полю, создаваемому магнитной системой. Изобретение позволяет упростить осуществление разворота космического аппарата по заданному направлению. Иващенко О.И. (RU) B1 018877 (56) US-A-5026008 RU-C2-2221733 SU-A1-932562 SU-A1-376782 Итоги науки и техники. Исследование космического пространства. Вопросы ориентации искусственных спутников. Том 11. Отв. ред. И.С. Щербина-Самойлова. М., 1978, с. 137-138 018877 (43) 2012.12.28 (96) 2011000061 (RU) 2011.05.11 (71)(72)(73) Заявитель, изобретатель и патентовладелец: САВУШКИН СЕРГЕЙ ЕВГЕНЬЕВИЧ; КОРШИКОВ АЛЕКСАНДР АЛЕКСАНДРОВИЧ; КОРШИКОВА ЖАННА СЕРГЕЕВНА (RU) 018877 Изобретение относится к космической технике, а именно к управляющим устройствам космических аппаратов (КА), и может быть использовано для поворота КА в пространстве относительно центра тяжести. В настоящее время в системах управления движением КА широко используются разнообразные инерционные исполнительные органы: маховики различного типа, силовые гироскопы (СГ) с двумя или более степенями свободы и т.п. Известен также способ управления КА с помощью реактивных исполнительных органов СГ и ДО (двигателей ориентации) (см. Система управления движением астрофизического модуля "Гамма", ТО 19К 30Ю 0000. НПО "Энергия" им. С.П. Королева, 1989). Указанный способ заключается в измерении текущего значения вектора кинетического момента в системе СГ в процессе поддержания заданного режима ориентации по измеренным параметрам ориентации опорного физического базиса и вектора абсолютной угловой скорости, в последующем определении суммарного значения вектора кинетического момента, а по нему и области S располагаемых значений вектора кинетического момента. После чего определяют изменения суммарного вектора кинетического момента для обеспечения завершения заданного режима ориентации и фиксируют положение КА в инерциальном пространстве. Далее определяют кинематические параметры разворота КА для совмещения вектора с направлением, противоположным вектору разгрузочного момента с максимальным значением произведения удельного импульса ДО на плечо действия тяги ДО, разворачивают КА в определенное положение и разгружают систему СГ , а после разгрузки определяют кинематические параметры разворота КА в заданную на величину ориентацию и производят разворот по определенным параметрам в заданную ориентацию. Недостатком данного решения является сложность процесса управления КА, так как для оптимальной разгрузки СГ с помощью ДО необходимо выполнить специальный дополнительный разворот КА, который не предусмотрен основной программой полета. Причем при больших моментах инерции КА указанный разворот становится невыполним с помощью одних только СГ, а применять дополнительно ДО для этого разворота не рационально. Ближайшим по технической сущности является способ изменения угловой ориентации и стабилизации космического аппарата, заключающийся в осуществлении воздействия на проводящую жидкость, находящуюся в сферическом корпусе, магнитным полем, и устройство для его осуществления, включающее сферический корпус с проводящей жидкостью и магнитную систему (см. патент RU 2051840, кл. B64G 1/32, опубл. 10.01.1996). Недостатками известных способа и устройства являются недостаточные надёжность и эффективность. Задачей изобретения является устранение указанных недостатков. Технический результат заключается в упрощении осуществления разворота космического аппарата по заданному направлению. Поставленная задача решается, а технический результат достигается в части способа тем, что согласно способу изменения угловой ориентации и стабилизации космического аппарата, заключающемуся в осуществлении воздействия на проводящую жидкость, находящуюся в сферическом корпусе, магнитным полем, жидкость размещают в сферическом слое, образованном между внешним сферическим корпусом и внутренним сферическим ядром, создают электрическое поле, перпендикулярное магнитному, и осуществляют поворот космического аппарата за счёт вращения жидкости в сферическом слое под действием силы Ампера. Поставленная задача решается, а технический результат достигается в части устройства тем, что в устройстве для изменения угловой ориентации и стабилизации космического аппарата, включающем сферический корпус с проводящей жидкостью и магнитную систему, внутри корпуса установлено сферическое ядро с образованием сферического слоя, заполненного проводящей жидкостью, причём внутри этого слоя попарно и диаметрально противоположно закреплены электроды, формирующие электрическое поле, перпендикулярное магнитному полю, создаваемому магнитной системой. Сущность заявленного изобретения поясняется чертежом. Предлагаемое устройство состоит из двух концентрических сфер - сферического корпуса 1 и сферического ядра 2, изготовленных с применением магнитных материалов, например магнитопластов. Магнитопласты - это постоянные магниты, с заранее заданным магнитным полем. Пространство между сферами (сферический слой) заполнено проводящей жидкостью, например ртутью. Внутри сферического слоя попарно и диаметрально противоположно расположены изолированные друг от друга электроды 3 для подачи напряжения к проводящей жидкости (на чертеже показана только одна пара электродов). Постоянное напряжение подается на два диаметрально расположенных электрода 3 через коммутационное устройство (на чертеже не показано), управляемое бортовым вычислителем. Устройство работает следующим образом. Для поворота КА в пространстве на некоторый угол определяют проходящую через центр сферы линию, которая будет являться осью вращения. Точки пересечения оси вращения со сферой задают два диаметрально расположенных электрода 3, на которые подают постоянное напряжение с коммутирующего устройства и формируют электрическое поле. В сферическом слое магнитной системой (на чертеже не показана) создают магнитное поле В, перпендикулярное электрическому. На проводящую жидкость в -1- 018877 магнитном поле В действует сила Ампера F, перпендикулярная линиям тока I, которая приводит ее в движение. Линии тока направлены по меридианам и соединяют положительный и отрицательный электроды 3. Корпус КА, жестко связанный со сферами 1-2, будет поворачиваться в направлении, противоположном движению проводящей жидкости вокруг оси, проходящей через центр сфер и диаметрально расположенные электроды. Угол поворота будет определяться силой тока, временем его действия и отношением между моментами инерции проводящей жидкости и КА, направление поворота - полярностью напряжения, подаваемого на электроды. Точность ориентации КА в пространстве определяется расстоянием между соседними электродами, которые равномерно заполняют всю поверхность одной из сфер. В случае, если ось вращения попадает на монтажный элемент, она может быть сдвинута параллельно до ближайших свободных контактов. Часть электродов может быть выполнена в виде тонких спиц, расположенных между сферами. Одновременно они играют роль монтажных элементов, фиксирующих сферы друг относительно друга. Размеры сфер 1 и 2 определяются размером космического аппарата и удобством подвода электроэнергии. Для микро- и наноспутников сферы могут служить внешней оболочкой, и для них контакты следует располагать на внешней поверхности ядра 2. Угловая скорость вращения КА определяется законом сохранения момента импульса, в нулевом приближении, без учета трения внутри жидкости и между жидкостью и сферами, а также неравномерного вращения жидкости I1ω1=I2 ω2, где I1, ω1 - момент инерции и угловая скорость вращения КА; I2, ω2 - момент инерции и угловая скорость вращения проводящей жидкости соответственно, при этом ω1 и ω2 имеют противоположные знаки. Предлагаемое устройство может быть упрощено, если использовать только две пары электродов. Для фиксации направления в пространстве достаточно двух степеней свободы. Оптимальным является расположение всех четырех электродов в вершинах квадрата в одной плоскости, проходящей через центр сфер. Уменьшение числа контактов приводит к усложнению системы управления. Таким образом, предлагаемые способ и устройство служат для поворота КА в пространстве относительно его центра тяжести. Устройство не содержит подвижных механических частей, а способ позволяет использовать простой одношаговый алгоритм поворота КА относительно оси, проходящей через центр тяжести. К преимуществам предлагаемого решения относятся: 1) отсутствие механических подвижных частей, что исключает возможность поломки или заклинивания устройства, т.е. увеличивает срок безотказной работы; 2) не требуется расхода вещества, как в реактивных двигателях, соответственно снимается ограничение на количество маневров; 3) независимость от магнитного или гравитационного поля планет позволяет использовать изобретение в межпланетном и межзвездном пространстве; 4) осуществляется эффективное использование всей массы рабочего тела (проводящей жидкости), в отличие от гироскопов; 5) отсутствует процедура "разгрузки" гироскопов, которая требует использования реактивных двигателей ориентации и расхода топлива, а также временного отключения системы ориентации. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для изменения угловой ориентации и стабилизации положения космического аппарата, включающее сферический корпус с проводящей жидкостью и магнитную систему, отличающееся тем, что внутри корпуса установлено сферическое ядро с образованием сферического слоя, заполненного проводящей жидкостью, причём внутри этого слоя попарно и диаметрально противоположно закреплены электроды, формирующие электрическое поле, перпендикулярное магнитному полю, создаваемому магнитной системой. 2. Способ работы устройства изменения угловой ориентации и стабилизации положения космического аппарата по п.1, заключающийся в осуществлении воздействия на проводящую жидкость, находящуюся в сферическом корпусе, магнитным полем, отличающийся тем, что создают электрическое поле, вектор напряженности которого перпендикулярен магнитной индукции, а поворот космического аппарата осуществляют за счёт вращения жидкости в сферическом слое под действием силы Ампера. -2- 018877 Евразийская патентная организация, ЕАПВ Россия, 109012, Москва, Малый Черкасский пер., 2 -3-